Изобретение относится к электротехнике, а именно к синхронизированному электроприводу,содержаще|МУ несколько вентильных двигателей с механически несвязанными валами,и может найти применение в приводах Систем для обеспечения синхронного перемещения исполнительных органов в широком диапазоне изменения нагрузки.. .
По основному авт.св. № 942232 известен многодвигательный электропривод с синхронно-вращёиощимися электродвигателями, содержащий каждый синхронную машину с многоканальными датчиком положения индуктора и коммутатор.
Синхронное вращение механически несвязанных валов обеспечивается тем, что многоканальный датчик положения индуктора через двухфункциональный преобразователь каждого сигнала датчика в последовательность импульсов, следующих друг за другом с интервалом времени, соответствующим величине пространственного рассогласования между индуктором данного электродвигателя и индуктором отстакяцего по направлению электродвигателя, связан с целью управления, по крайней мере.
одного ключа когФ1утатора, к цепи управления которого подключен формирователь, по крайней мере,: одного импульса на временном интервале мегоху двумя последовательностями импульсов, длительность которого соответствует указанному пространственному рассогласованию между индукторами электродви гателей 13.
10
Недостатком такого электропривода является снижение энергетических показателей установившихся режимах работы при неодинаковых моментах нагрузки электродвигателей, вызванное
15 тем, что менее нагруженный электродвигатель работает в режиме: разгонактивное торможение. Другим недостатком электропровода являются его ограниченные функциональные возгложности,
20 непозволяк1сцие, в частности, осуществлять изменение характера алгоритма управления в процессе работы электропривода. ,
Цель изобретения - повышение энергетических показателей электропривода и расширение его функциональных возможностей.
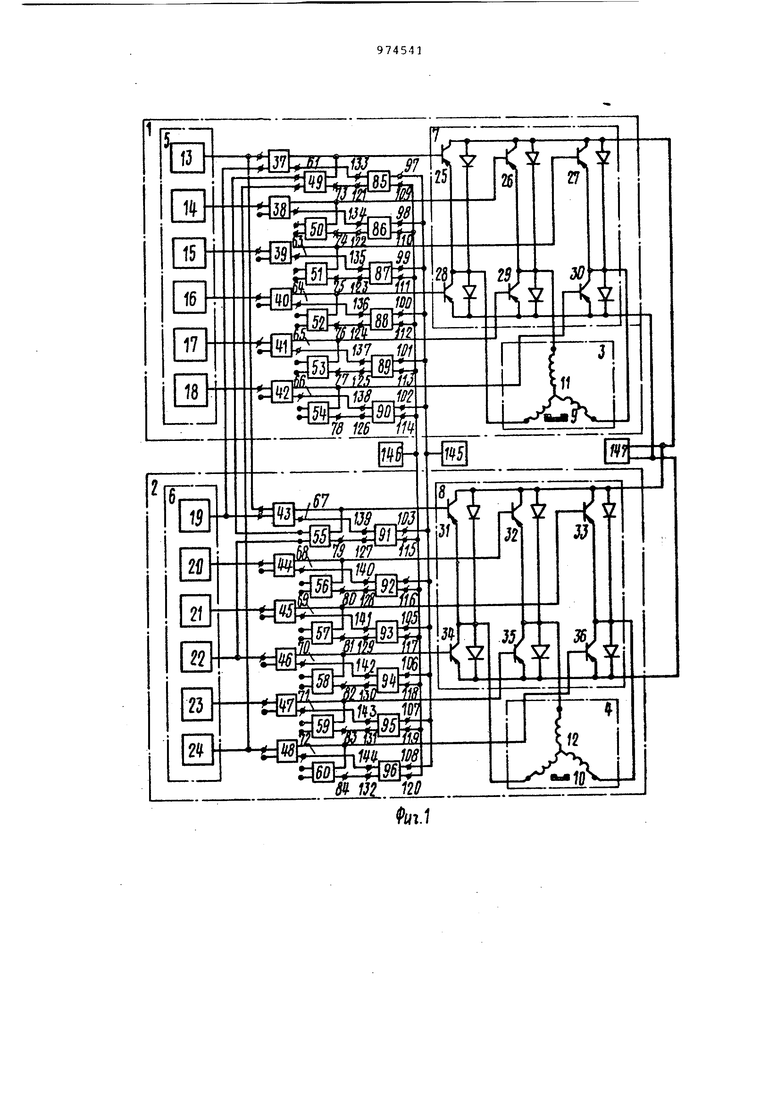
Поставленная цель достигается тем, что основной многрдвигательный элект и ропривод дополнительно снабжен устройством сравнения с приемным .и инверсным выходами, задающим устройством и датчиком контролируемого аппарата, причем функциональный преобразователь выполнен с цепью управления, а формирователь снабжен регулятором числа формируемых имггульсов, управляющий вход которого подключен к одному из выходов, например прямому, устройства сравнения, к другому выходу которого подключена цепь управления функционального преобразо вателя, На фиг. 1 изображена блок-схема двухдвигательного электропривода; на фиг. 2 - пример реализации на эле ментах логики функционального преобразователя с цепью управления формирователя импульсов с регулятором чис ла формируемых импульсов и устройств сравнения величины фазового рассогла сования с порогойым значением; на фиг. 3 - диаграммы напряжений в узла двухдвигательного основного электропривода в установившемся ре:«име; на фиг. 4 - диаграммы напряжений в узла двухдвигательного электропривода, схематически изображенного на фиг.1 и 2 в установившемся режиме;на фиг.5 то же, в переходных режимах. НЪ фиг. 1 изобрахсен двух,ЦБигатель ный электропривод с двумя электродвига телями 1 и 2. Электродвигатели 1 и 2 содержат, соответственно, синхронные машины 3 и 4 с многока-нальшхпии датчиками положении индуктора 5 и б и /двухполупериодные коммутаторы 7 и 8. синхронные машины могут быть любого типа, например с магнитоэлектрическим возбуждением, и содержат индукторы 9 и 10 и якорные обмотки 11 и 12. Датчики положения индуктора могу быть любого типа, например индуктивные, и содержат в данном конкретном случае по шесть чувствительных элементов (каналов) каждый, соответственно, 13-18,и 19-24. Коммутаторы 7 и 8 содержат по шесть ключей каждый, соответственно 25-30 и 31-36, которые могут быть выполнены на любы управляемых переключающих П|)иборах, например транзисторах. Электродвигатели в данном случае содержат по шес функциональных преобразователей каждый, соответственно, 37-42 и 43-48, осуществляюсщх преобразование каждог сигнала датчика в последовательность импульсов, следующих друг за другом с интервалом времени, соответствующим величине пространственного рассогласования между индуктором данного электродвигателя и индуктором отстающего по направлению движения. Электропривод содержит по шесть формирователей импульсов для каждого электродвигателя, соответственно, 49-54 и 55-60. Каждый из указанных фор1 рователей формирует, по крайней мере, один импульс на временном интервале метаду двумя последовательностями импульсов, длительность которого соответствует указанной величине пространственного рассогласования. Функциональные преобразователи 37-42 и 43-48 снабжены цепями управления, соответственно 61-66 и 67-72. При одиничном сигнале в цепи управления функциональный преобразователь выполняет предписанную ему функцию, а при нулевом сигнале запрещает прохождение сигнала с датчика в цепь управления ключа коммутатснра Формирователи импульсов 49-54 и 55-60 выполнены с регулятором числа формируемых импульсов (регуляторы условно изображены в составе формирователей) ,снабженных управляющими входами 73-78 и 79-84 соответственноПри изменении характера сигнала на управлягацем входе регулятор изменяет число формируемых импульсов на выходе формирователя. Например,при изменении сигнаша с нуля на единицу число импульсов на выходе формирователя может быть изменено с нуля на один, с одного на два или с любого сочетания импульсов на любое другое сочетание импульсов. Электродвигатели содержат по шесть устройств сравнения каждый, соответственно, 85-90 и 91-96. Устройетва сравнения снабжены первыми входами, соответственно, 97-102 и ЮЗЮЗ, вторыми входами, соответственно, 109-114 и 115-120, прямыми выходами, соответственно, 121-126 и 127-132 и инверсными выходами соответственно, 133-138 и 139-144. Электропривод содержит задающее устройство 145 и датчик контролируемого параьметра 146. Электродвигатели 1 и 2 подключены к источнику электроэнергии любого типа, например источнику постоянного тока 147. Якорные обмотки 11 и 12 синхронных машин 3 и 4 подключены к выходам коммутаторов 7 и 8.Многоканальные датчики положения индукторов 5 и 6 связаны с цепями управления ключей 25-30 и 31-36 коммутаторов 7 и 8 через функциональные преобразо.ватели 37-42 и 43-48. К цепям управления упомянутых ключей 25-30 и 3136 подключены формирователи импульсов 49-54 и 55-60 соответственно. Цепи управления 61-66 и 67-72 функциональных преобразователей 3742 и 43-49 подключены к инверсным выходам 133-138 и 139-144 устройств сравнения 85-90 и 91-96. Управляющие входы 73-78 и 79-84 регуляторов числа формируемых импульсой формирователей 49-54 и 55-60 подключены к прямым выход.ам 121-126 и 127-132 устройств сравнения: 85-90 и 91-96, первые входы 97-102 и 103-108 которых подключены к зсщающему устройству 145 а вторые входы 109-114 и 115-150 к датчику контролируемого параметра 146.
На примере двух функциональных преобразователей 37 и 43 и двух формирователей 49 и 55 показаны их связи с каналами датчиков 5 и 6.
Функциональные преобразователи 37 и 43 связаны с одноименными каналами 13 и 19 датчиков 5 и 6.
Формирователи 49 и 55 связаны с каналами датчиков 5 и 6; первый (49) с каналами 16 и 24, второй (55) - с каналами 18 и 22.
Эти связи являются необходимыми (но недостаточными) и показаны условно в том смысле, что каждый конкретный функциональный преобразователь 37, осуществляет преобразование каждо го сигнала 13 датчика положения индуктора Бив последовательность импульсов, следующих друг за другом с интервалом времени,. соответствующим величине пространственного рассогласования между индуктором 9 данного электродвигателя -1 и индуктором 10 остающего по направлению движения к измеренным с помощью сигнала одноименного с каналом 13 канала 19 датчика положения индуктора б, и что формирователь импульсов 49 осуществляет формирование по крайней мере одного импульса на временном интервале между двумя последовательностями импульсов,длительность которого соответствует указанной величине пространственного рассогласования, измеренного с помснцью сигналов каналов 16 и 24 датчиков 5 и б.
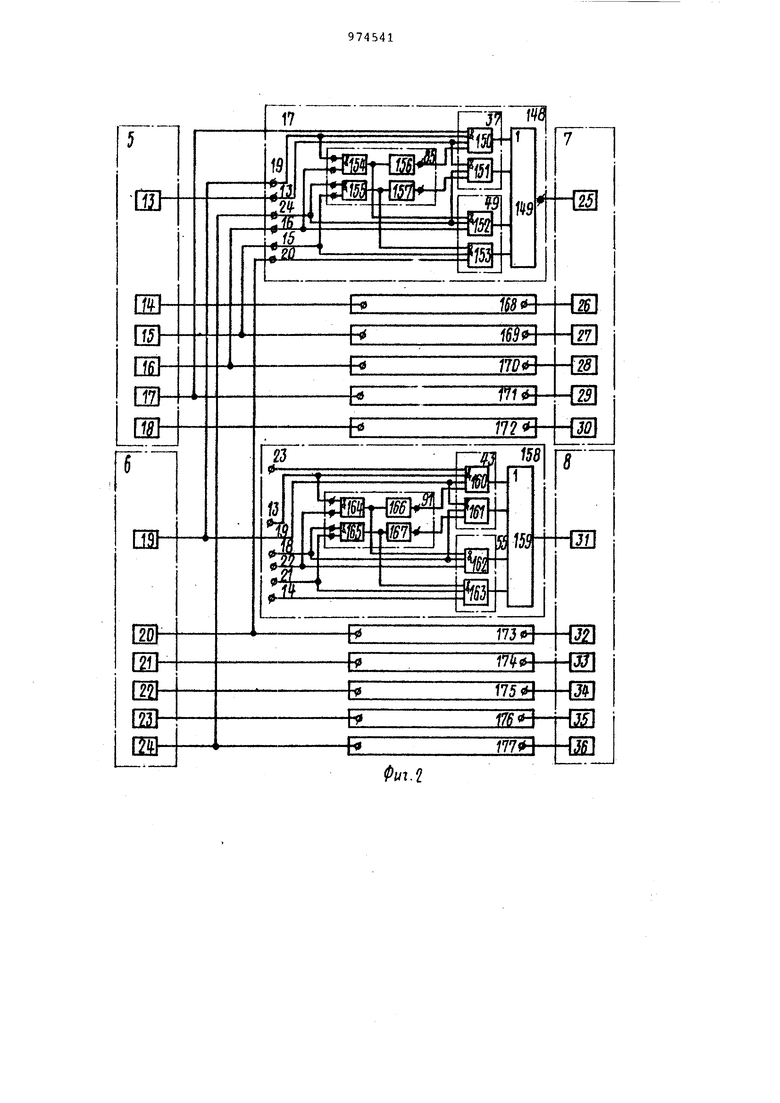
На фиг. 2 показан пример реалиэации на элементах логики функционального преобразователя с цепью управления формирователя с регулятором числа формируемых импульсов и устройства сравнения с и инверсными выходами на примере двухдвигательного электропривода, изображенного на фиг.1.
Преобразователь, формирователь и устройство сравнения, например, 37, 49 и 85 могут быть реализованы с помощью логической ячейки 148, включающей одну четырехвходовую схему ИЛИ 149, шесть схем И, одна из которых четырехвходовая 150, три трех.входовые 151, 152 и 153, Две - двувходовые 154, 155 и двух инверторов 156, 157 и логической ячейки 158.
К входам схекы И 150 подключены каналы (чувствительные элементы) 13 и 17 датчика 5, 19 датчика 6 и выход инвертора 156j к входам схемы И 151 каналы 15 датчика 5, 24 датчика 6 и выход инвертора 157J к входам схемы И 152 - каналы 16 датчика 5, 24 датчика 6 и выход схемы И 154; к входам И 153 - каналы 15 датчика 5, 20 датчика 6 и выход cxeNM И 155; к входам схема И 154 - каналы 16 датчика 5 и 19 датчика 6; к входам схеMj И 155 - каналы 15 датчика S и 24 датчика 6. Выходы схем совпгшения 150-153 подключены к входам схемы ИЛИ 149, а выходы схем 154 и 155 подключены к входам инверторов 156 и 157, соответственно. .Выход схемл НЛП 149 подключен к цепи управления ключа 25 коммутатора 7 электродвигателя 1.
Аналогичные соединения выполнены и для логических схем 159-167 электродвигателя 2. В каналах 14-18 и 2024 датчиков 5 и б включены соединенные аналогичным образом логические ячейки 168-172 и 173-177.
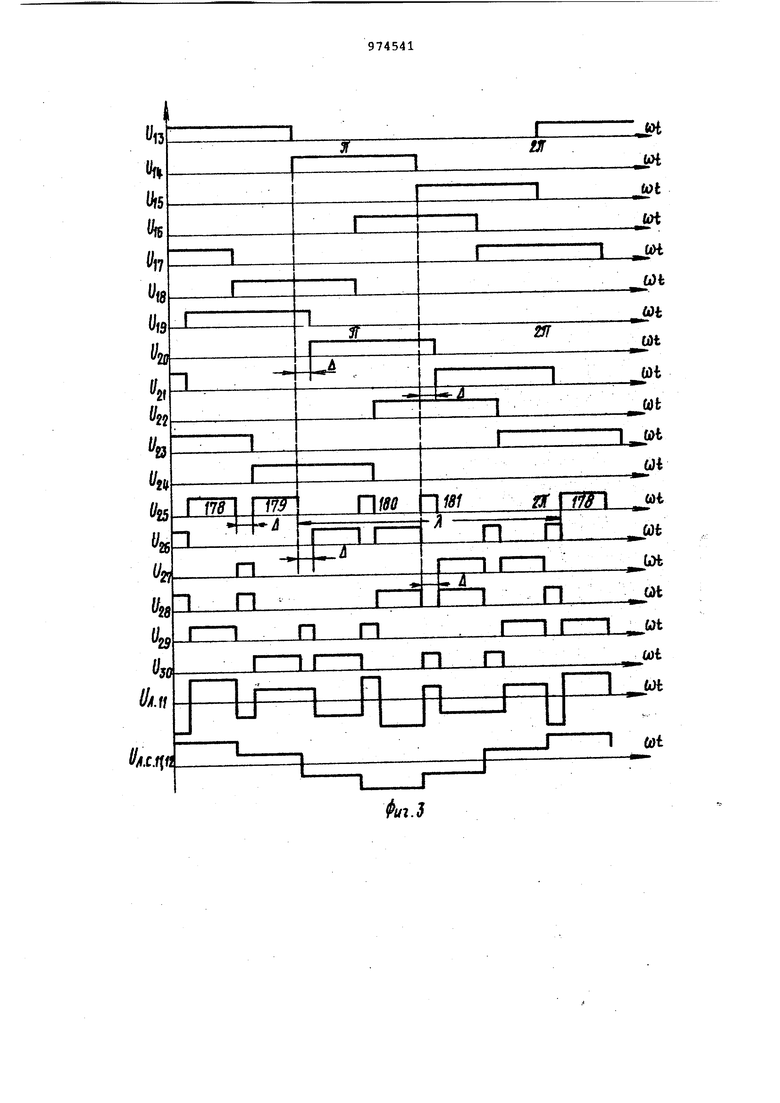
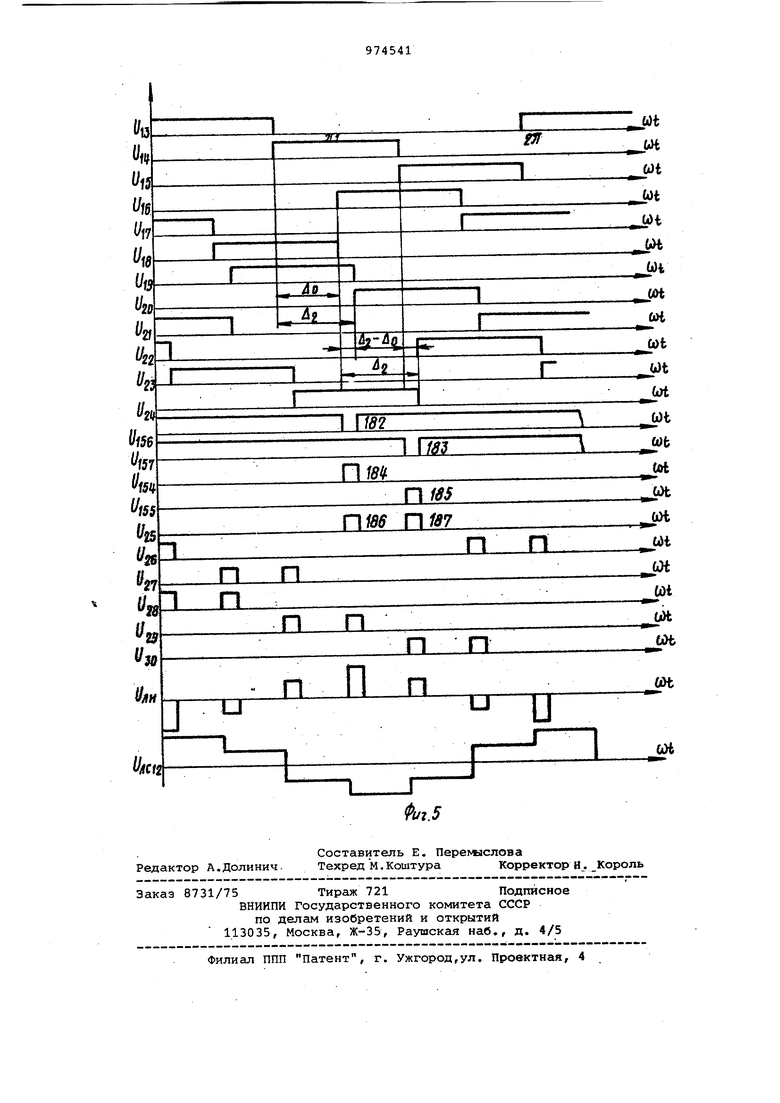
Работа электропривода поясняется диаграммами напряжений в их узлах на фиг. 3, 4 и 5.
Устройство работает следующим образом.
Для случаев, когда индуктор 10 отстает от индуктора 9, на угол 4 который меньше заданного значения д„ .
Сигналы в каналах датчика б - U24 OTCTcUOT в фазовом отношении от одноименных с ними сигналов t 18 каналах датчика 5 на угол д. Преобразование в данном случае осуществляется в каналах 13-18 датчика 5. При этом функционируют преобразователи 37-42, формирователи 49-54 и устройства сравнения 85-90, которы сравнивают текущее значение пространственного рассогласования между индукторами электродвигателей 1 и 2 с заданным значением Ло . Рассмотрим преобразование сигнала канала 13 датчика 5 электродвигателя 1 с помощью логической ячейки 149, содержащей преобразователь 37, выполненный на логических схемах 150, 151 совместно с 149, формирователь 49, выполненный на логических cxeMcix 152, 153 совместно с 149 и устройство сравнения 85, выполненное на логических схемах 154, 155 совместно с инверторами 156 157, соответственно. В качестве задагадего устройства 145 используется датчик б электродвигателей 2 (каналы 19 и 24 датчика, подключенные к схемам 154, 155 устройств сравнения 85 . Датчиком контролируемого парамера служит датчик 5 электродвигателя 1 (каналы 16 и 15 датчика, подключенные к входам схем 154, 155 устройства сравнения 85), Целью управления 61 функционального преобразователя 37 являются входы схем 150, 151, которые подключены к инверторам 156, 157, управляющим входом 73 регулятора числа импульсов формирователя 49 являются входы схем, подключенные
к выходам схем 154 и 155. Прямлм выходом 121 устройства сравнения 85 являются выходы схем 154, 155, инверсным выходом 133 - выходы инверторов 156, 157. Для рассматриваемого случая (фиг. 4) пространственное рассогласование между индукторами 9 и 10 электродвигателей 1 и 2 меньше заданного значения /i,,, определяемого в данном конкретном случае подключением ус ройства сравнения 85 к соответствующим каналам датчиков 5 и 6 электродвигателей 1 и 2. Поступанадие на входы логических схем 154 и 155 сигналы U(j, и , li,соответственно, не совпадают (фиг. 4), и на выходе этих схем, а следовательно, и на управляющем входе регулятора числа импульсов формирователя 49, логических схемах 152 и сигналы отсутствуют (сигналы фиг. 4 имеют нулевой уровень).
На управляющих цепях преобразователя 37, схемах 150 и 151 сигналы присутствуют (U-t5b, Ui5i)Ha фиг. 4 имеют единичный уровень), так как они поступают с инверсных выходов устройства сравнения 85, с выхода схем 154 и 155 через инверторы 156 и 157, соответственно.
Устройства сравнения пространственного рассогласования 85-90 разрешают прохождение сигналов каналов 13-18 на управляющие входы ключей 25-30 коммутатора 7 через преобразователи 37-42 запрещают щэохождение сигналов через формирователь импульсов 49-54 (число импульсов на выходе формирователя равно нулю). На ключи 25-30 коммутатора 7 поступают преобразованные сигналы Urj5 w (фиг. 4).
Преобразователи, формирователи и устройства сравнения электродвигателя 2 не осуществляют преобразования, поскольку его индуктор 10 отстает в фазовом отношении от индуктора 9 электродвигателя 1.
Линейное напряжение Un.,Ha якорной обмотке 11 для рассматриваемого случая изображено на фиг. 4. Для сравнения там же изображена форма линейного напряжения якорных обмотках 11 и 12 при синфазном вращении ротора электродвигатбшей 1 и 2.
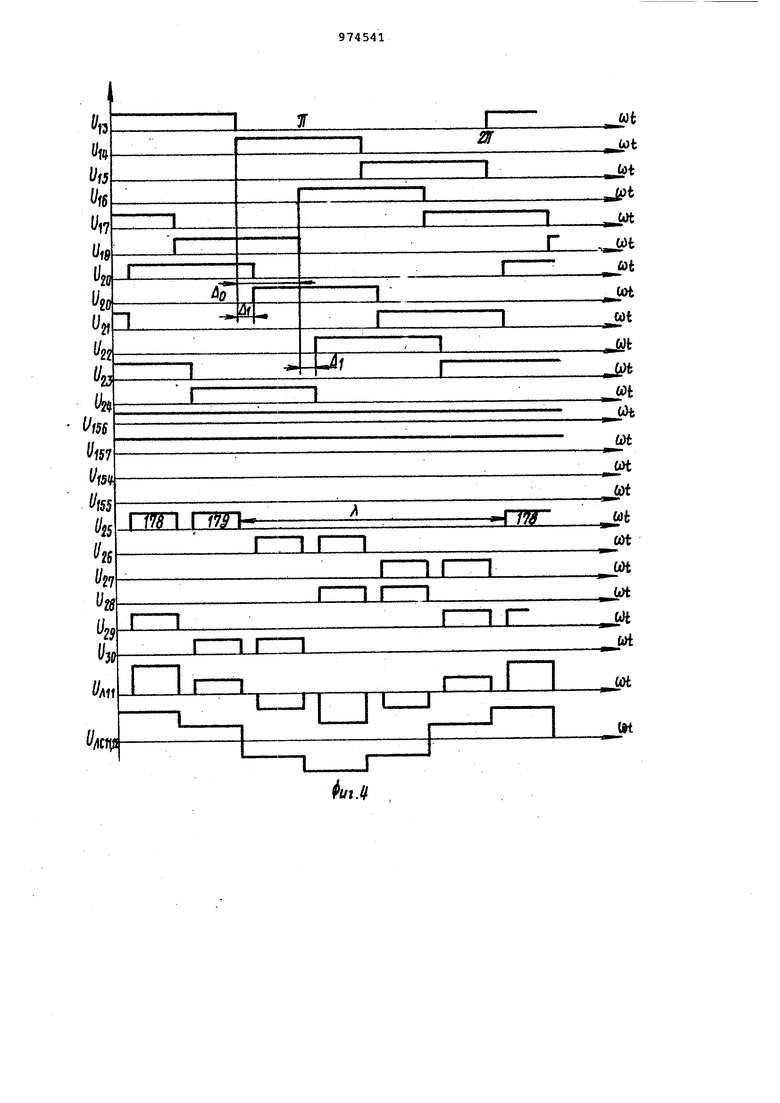
Рассмотрим работу электропривода для случая, -когда индуктор 10 также отстает от индуктора 9, но при этом угол пространственного рассогласования й больше заданного значения 1Ло(Фиг. 5).
Сигналы в каналах датчиков -11 отстают в фазовом отношении от одноименных с ними сигнсшов и.,1 - в калалах датчика 5 на угол л 7 .
Преобразование в данном случае осуществляется в каналах 13-18 датчика 5 электродвигателя 1, При этом функционируют преобразователи 37-427 формирователи 49-54 и устройства сравнения 85-90, которые сравнивают текущее значение пространственного рассогласования между индукторами электродвигателей 1 и 2 с заданным значением &о
0 Рассмотрим преобразование сигнала кансша 13 датчика 5 электродвигателя 1 с помощью логической ячейки 148, содержащей преобразователь 37 на логи,ческих схемах 150, 151 совместно с
5 14, формирователь 49, выполненный на логических схемах 152, 153,.совместно с 149 и устройство сравнения 85, выполненное на логических схемах 154, 155, совместно с инверторс1ми
0 156 и 157 соответственно.
В качестве задающего устройства 145 используется датчик- б электродвигателя 2 (каналы 19 и 24 датчика подклочены к входам схем 154, 155 уст
5 ройства сравнения 85). Датчиком контролируемого параметра служит датчик 5 электродвигателя 1 (каналы 16 и 15 датчика, подключенные к входам схем 154, 155 устройства 85),Пряилм выходом 121 устройства сравнения 85
являются выходы схем 154, 155, инверсч ным выходом 133 - выходы инверторов 156, 157.
Для рассматриваемого случая (фиг. 5) пространственное рассогласо.ванне д между индукторами 9 и 10 электродвигателей 1 и 2 больше заданного значения л, определяемого в данном конкретном случае подключением устройства сравнения 85 к соответствующим каналам датчиков 5 и 6 электродвигателей 1 и 2.
Поступающие на входы логических схем 154 и 155 сигналы , , и 24, соответственно, совпадают
5 (фиг. 5). С выхода схем 154, 155 на управляющий вход регулятора числа импульсов формирователей 49 входы логических схем 152, 153 поступает сигнал в виде импульсов 184, 185
0 (см, и 154 и Uf55 из фиг. 5).
На управляк«цую цепь преобразователя 37, логические схемы 150, 151 в это время поступает запрещающий сигнал через инверторы 156, 157 в
5 виде отрицательных импульсов нулевого уровня 182, 183 (см. (, и на фиг. 5).
Таким образом, устройства сравнения пространственного рассогласования 85-90 в данном случае разрешают прохождение сигнгшов каналов 13-18 на управлякяцие входы ключей 25-30 коммутатора 7 электродвигателя 1 формирователи 49-54 и запрещают
5 11рохождениёсигналов на управляющие
входи указанных ключей через преобразователи 37-42. На ключи 25-30 коммутатора 7 поступают преобразованные сигналы nj5 УЗО
Преобразователи, формирователи и устройства сравнения электродвигателя 2 не осуществляют преобразования, поскольку его индуктор 10 отстает в фазовом отношении от индуктора 9 электродвигателя 1.
Таким образом, для изобретения имеют место два случая. Первый случай имеет место при малых углах пространственного рассогласования роторов электродвигателей,- когда ненагруженный электродвигатель 1 работает в резкиме разгона, т.е. тормозится на выбеге при отключении источ.ника электроэнергии от якорной обмотки. Второй случай имеет место при больших углах пространственного рассогласования ротора электродвигателей, когда ненагруженный электродвигатель работает только в режиме тормжения противовключением и на выбеге.
Значительные углы пространственного рассогласования роторов электродвигателей имеют место в переходных режимах, например при значительном скачкообразном изменении нагрузки на валу или напряжения питания на одном из электродвигателей. Таким образом, в предлагаемом устройстве режим торможения противовключением осуществляется лишь при переходных процессах в электроприводе, т.е. кратковременно.
В остальных случаях, когда электрпривод работает в установившихся режимах, ненагруженный электродвигатель работает в- квазиустановившемся режиме; раэгон-торможение на выбеге, в то время Kaij в устройстве по прототипу ненагруженный электродвигатель в любом случае работает в режиме раэгон-активное торможение, расходуя пр этом кроме электроэнергии, требуемой для поддержания частоты вращения, равной частоте вращения нагруженного электродвигателя, электроэнергию на торможение и на дополнительный раэгон, обусловленный этим торможением.
Кроме того, в установившемся режиме работы, когда угол рассогласования меньше л,, формирователь с регулятором числа формируемых импульсов может осуществлять менее эффективное торможение, например динамическое (случай когда формируются импульсы управления в установившемся режиме только для управления верхними ключами) .
При этом сигналы на ключи проходят через функциональный преобразователь, формирователь с регулятором числа формируемых импульсов создает импульсы динамического торможения.
При угле рассогласования больше л по сигналам устройства сравнения формирователь увеличивает количество формируемых импульсов, а функциональный преобразователь во время действия этих импульсов снимает сигнал с цепей управления ключами коммутатора, что и изменяет режим разгона и торможения опережающего электродвигателя, обеспечения более эффективное тормо0жение.
Примером, ПОЯСНЯЮ1ЦИМ раоиирение функциональных возможностей электропривода, может служить случай,когда в качестве задающего устройства 145
5 будет источник эталонной частоты, а в качестве датчика контролируемого параметра 146, например, датчик 5 электродвигателя 1 (фиг. 1). Пусть первые входы 97-102 устройства сравнения 85-90 подключены к источнику
0 этсшонной частоты, а вторые входы 109-114 подключены к одному из каналов 13-18 датчика 5.При частоте вращения электропривода выше эталонной ее величина на входах 109-114 больше,
5 чем на входах 97-102 устройств ; сравнения. 85-92. При этом на прямых выходах 121-126 устройств - сравнения появляется разрешаквдий сигнал, и на инверсных выходах 133-138 - запрещаю0щий. Разрешгиощий сигнал, поступая на управляющие входы 73-78 регулятора числа импульсов формирователей 49-54, разрешает прохождение импульсов на управляющие входы ключей 25-30.
5 Запрещающий сигнал, поступая на управляющие цепи 61-66 функциональных преобразователей 37-42, запрещает прохождение сигналов с каналов 13-18 датчика 5 на управляющие входы 25-30 ком0мутатора 7.
На управляющих входах 25-30 будут сигналы типа УЗО (см. фиг. 5). В соответствии с напряжением U, ц (фиг. 5) электродвигатель 1 активно
5 тормозится, а частота вращения электропривода снижается. При снижении частоты вращения электропривода ниже эталонной ее величина на входах 109114 становится ниже чем на входах 97-102 устройств сравнения 85-92.
0 При этом на прямых выходах 121-126 устройств сравнения появляется запрещающий сигнал, а на инверсных выходах 133-138 - разрешающий.
5
Запрещающий сигнал, поступая на входы 73-78 регулятора числа импульсов формирователей 49-54, запрещает прохождение импульсов на управляюище входы ключей 25-30 коммутатора 7.Раз0рвиаюищй сигнал, поступая на управляющие цепи 61-66 функциональных преобразователей 37-42, разрешает прохождение сигналов с каналов 13-18 датчика 5 на управляющие входы 25-30 клю5чей коммутатора 7. На управляющих
входах 25-30 поступают сигналы типа на фиг. 4, В соответствии с линейным напредением на якорной обмотке 11 и. (фиг. 4) с электродвигателя 1 активное торможение снижается, я частота вращения электропривода возрастает.
Таким образом многодвигательный синхронный электропривод выполняет функцию стабилизации частоты, поддерживая ее на заданном уровне.
Задающим устройством может быть и эадатчик чередования фаз, например, относ телБНо друг друга электродвигателей 1 и 2, что позволит обеспечить синхронную связь электродвигателей электропривода при разлиных аварийных ситуациях (внезапный останов одного из электродвигателей обрыв цепи питания ИТ.пО
Задаклцим устройством может быть, например, датчик разности моментов на валах электродвигателей и др.
При реализации перечисленных многодвигательных электроприводов с различными задающими устройства№О функциональная схема предложенного электропривода не изменяется.
Данный электропривод позволяет повысить энергетические показатели
электропривода и расширить его функциональные возможности.
Формула изобретения
Многодвигательный электропривод по авт.св. 942232,0 т л и ч а ю ц и и с я тем, что, с целью расширения функциональных возможностей и повышения энергетических показателей,
Электропривод дополнительно снабжен устройством сравнения с прямым и .инверсным выходами, задгиощим устройством и датчиком контролируемого параметра, причем функциональный преобразователь выполнен с цепью управления, а формирователь снабжен регуля- . тором числа формируемых импульсов, управляютий вход которого подключен к одному их выходов, например, прямому, устройства сранения, к другому выходу которого подключена цепь управления функционального преобра- , зователя,
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР 942232, кл. Н 02 Р 7/68,13.03.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Вентильный электродвигатель | 1989 |
|
SU1677839A2 |
| Вентильный электродвигатель | 1985 |
|
SU1309241A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |