(54) УСТРОЙСТВО УПРАВЛЕНИЯ УСТАНОВКОЙ НАПРАВЛЯКЩИХ Устройство относится к прокатному производству, а именно к станам горячей, прокатки, и предназначено для управления установкой направляющих линеек при входе полосы в моталку барабанного типа. Известно устройство управления моталкой с плавающим барабаном, содержа щее датчик положения края полосы, вычислительный блок и гидроцилиндр пере движения барабана моталки Известно устройство для регулирова ния положения приемного барабана по средней линии наматываемого ленточного материала, содержащее датчики поло жения кромок ленточного материала, ис полнительный механизм и вычислительный блок 2. В известных устройствах для предот вращения телескопичности рулонов при смотке следят за краем полосы и изменяют положение барабана в соответстви с отклонением края полосы от заданного. Такие устройства не могут быть
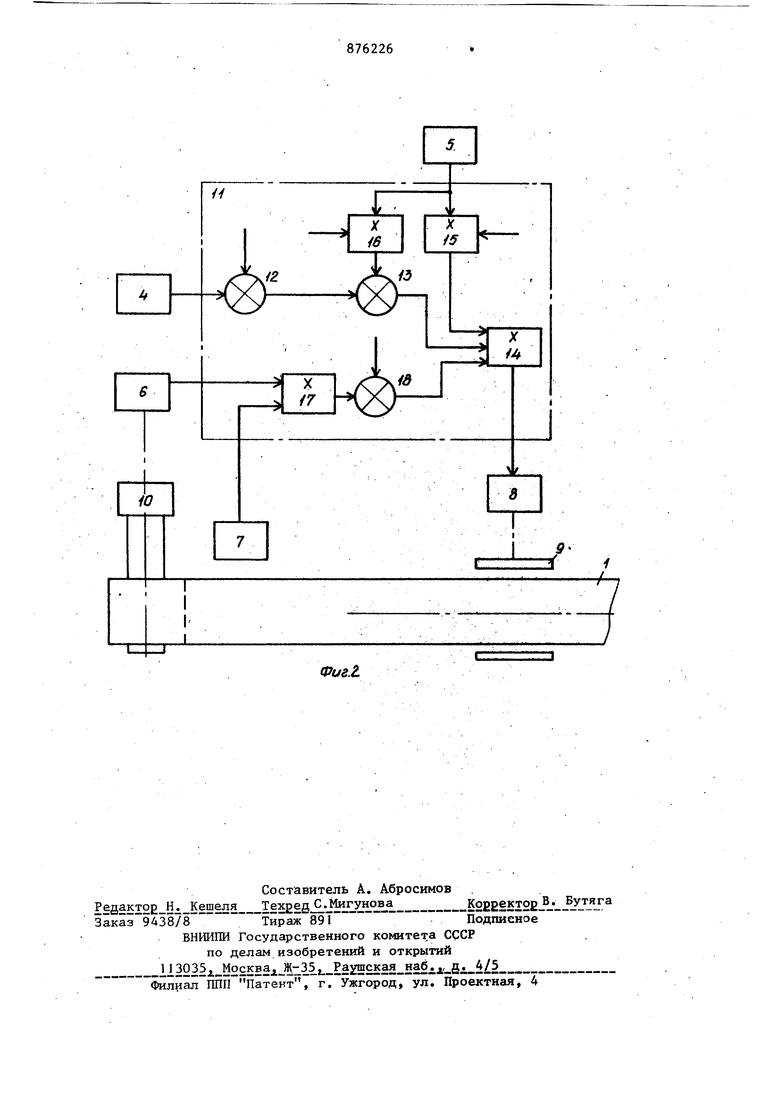
ЛИНЕЕК применены для предотвращения телескопичности на широкополосных станах горячей прокатки, где применяются моталки с неподвижным барабаном. Кроме того, необходимость применения датчика края полосы-,связана со знади,т щ нь1ми трудностями, обусловленными тяжелыми условиями работы датчика, высокой температурой, наличием 0рыэг воды и масла, вибраций и др. Известно устройство управления электроприводом моталки, минимизирующее телескопичность рулона, в котором величина натяжения смотки полосы изменяется по определенному закону так, чтобы телескопичность рулона была минимальной {ЗЦ. Известное устройство не может устранить естественную телескопичность, связанную с изгибом консольно закрепгленного барабана моталки, кроме того, его. реализация требует строгого выполнения закона изменения величины на38пряжения, что не всегда возможно по условиям технологии смотки. Наиболее близким к предлагаемому по технической сущности и достигаемому результату являются направляющие линейки, имеющие пневмоцилиндры, электропривод и сельсин, образующие исполнительный механизм и командоаппарат (блок ввода постоянных величин) , Линейки служат для центрирования полосы относительно оси прокатки при входе последней в моталку Г43. Применение направляющих линеек не предотвращает возникновение телесколичности рулона при смотке, связанной с изгибом консольно закрепленного барабана моталки. Изгиб барабана возникает при захвате полосы барабаном и возникновении натяжения полосы между барабаном и последней прокатной клетью. Кроме того, по мере намотки поло сы на барабаны возникает изгиб консоли (барабана) под действием значитель ного веса рулона, вес .которого в современных прокатных станах может доходить до 40-6Q т. Натяжение смотки и вес барабана обуславливают возникно вение изгиба барабана, что приводит к появлению телескопичности рулона, величина и знак которой могут изменяться в зависимости от соотношения между натяжением, весом рулона и взаимным положением барабана и тянущих роликов Цель изобретения - повышение качества намотки полосы в рулон за счет уменьшения телеокопичности рулона. Эта цель достигается тем, что устройство управления установкой направляющих линеек, содержащее блок ввода постоянных величин, выход KOTof dro соединен с испол1 ительным блоком, снабжено датчиком веса полосы, наматываемой на., барабан , датчиком натяжения полосы при смотке, датчиком угла поворота барабана и вычислительным блоком. Причем выход датчика веса полось1- соединен с первым входом вычислительного блока, второй вход которого соединен с выходом датчика натяжения, третий вход соединен с-датчиком угла поворота барабана, четвертый вход соединен с блоком ввода постоянных величин, а выход соединен с первым входом исполнительного блока, вто рой вход которого соединен с выходом блока ввода постоянных величин. Вычислительный блок содерямт три сумматора и четыре умножителя. Причем выход первого сумматора, вход котороГО служит первым входом вычислительного блока, соединен с первым входом второго сумматора, выход которого соединен с первым .входом первого умножителя, входы второго и третьего умножителей являются вторым входом вычислительного блока, выход третьего умножителя соединен со вторым входом второго сумматора, а выход второго умножителя - со вторым входом первого умножителя, выход датчика угла поворота барабана соединен с первым входом Четвертого умножителя, являющегося третьим входом вычислительного блока, выход /четвертого умножителя соединен со входом третьего сумматора, выход которого соединен с третьим входом первого умножителя, выход которого, являнлцнйся выходом вычислительного блока, соединен с первым входом исполнительного блока, второй вход четвертого умножителя одновременно являющийся четвертым входом вычислительного блока, соединен с блоком ввода постоянных величин и вторым входом исполнительного блока. Датчик веса полосы, наматываемой на барабан, служит для определения текущего веса рулона на барабане. Информация, даваемая этим датчиком служит для подсчета величины изгиба барабана, определяемой весом рулона. Датчик натяжения смотки полосы служит для измерения величины натяжения смотки, что позволяет вычислять величину изгиба барабана, вызванную натяжением полосы. Вычислительный блок служит для обработки информации, поступающей от датчиков и вычисления величины уставок линеек по формулам. Введение в устройство указанных датчиков позволяет получить необходимую для расчета пложения линеек информацию, а введение вычислительного блока - производить арифметические операции по заложенным в него формулам, в результате чего исполнительный блок производит смещение линеек в соответствукйпую сторону в плоскости, перпендикулярной оси прокатки. При этом лииейки воздействуют на боковые кромки полосы и смещают ее в нужном направлении, з еньщая телескопичность рулона. На , 1 изображена схема приложения сил.натяжения и веса к барабану, поясняющая причину возникновения изгиба консолей барабана; на фиг, 2 - , блок-схема устройства управления установкой направляющих линеек. 5 Полоса J проходит между двумя тянущими роликами 2 и наматывается на консольно закрепленный барабан 3, Уст ройство (фиг. 2) содержит датчик 4 те кущего веса полосы, наматываемой на барабан 3, датчик 5 натяжения полосы при смотке, датчик 6 угла поворота барабана, блок 7 ввода постоянных величин, исполнительный блок 8, направляющие линейки 9, электродвигатель 10 и вычислительньй блок 11, Причем выход датчика текущего веса полосы соединен с первым входом вычислительного блока 1I, второй вход которого соединен с датчиком 5 натяжения полосы, третий вход соединен с блоком 7 ввода постоянных величин, а выход соединен с первым входом исполнительного блока 8. Кроме того, вычислительный блок П содержит первый сумматор 12, второй сумматор 13, первый згмножитель 14, вт рой умножитель 15, третий умножитель четвертый умножитель 17 и третий сумматор 18. Причем выход первого сумматора 12, вход которого служит первым входом вычислительного блока 11, соединен с первым входом первого умножителя 14, входы второго 15 и третьего 16 умножи телей являются вторым входом вычислительного блока 11, выход третьего умн жителя 16 соединен со вторым входом второго сумматора 13, а выход второго умножителя 15 - со вторым входом первого умножителя 14, выход датчика 6 угла поворота барабана соединен с пер вым входом четвертого умножителя 17, являияцегося третьим входом вычислительного блока 1), выход четвертого умножителя 17 соединен со входом третьего сумматора 18, выход которого соединен с третьим входом первого умножителя 14, выход которого является выходом вычислительного блока 11, со-единен с первым входом исполнительного блока 8, второй вход четвертого умножителя 17, являющийся одновременно четвертым входом блока 11, соединен с блоком 7 ввода постоянных величин и вторым входом исполнительного блока 8. Датчик 6 угла поворота барабана связан с барабаном 3 моталки, который приводится во вращение электродвигателем 10. Направляющие линейки 9 установлены перед входом полосы 1 в моталку. Натяжение смотки Т в общем случае направлено под углом oL к горизонтали, что связано с тем. 6 ЧТО, как правило, моталка располагается ниже уровня отводящего рольганга. На ось барабана действует также сила веса барабана Q и рулона бр . Принято считать, что вьппёукаэанные силы приложены .к концу барабана. Под действием веса барабана и рулона консоль барабана изгибается, вследствие чего при намотке полосы возникает телескопичность отрицательного знака (т.е. направленная в сторону свободного конца барабана. те 2. ъ,)( где t - длина барабана; Э - момент инерции сечения барабана;Е - модуль упругости материала барабана; DJ,- диаметр барабана; V - толщина полосы; tt - число витков полосы на барабане. Вертикальная составляющая силы Т, входящая в формулу (1), уменьшает отрицательную телескопичность дв, так как направлена вверх (фиг. О. Под действием натяжения Т возникает положительная телескопичность, определяемая по формуле (1) В формулах (1) и (2 } угол ct считается неизменным вследствие его малости и незначительного изменения при увеличении диаметра рулона. В необходимых случаях он. может быть введен как функция радиуса рулона. Общая телескопичность, вызываемая изгибом консольного барабана моталки, определяется как алгебраическая сумма уравнений О) и (2; () T(coscL-SindH%fQp) (3) Как видно из формулы 3 , общая те- ескопйчность является функцией числа оборотов барабана (угла поворота), натяжения и веса рулона, причем натяение и вес рулона создают телескопич- ность противоположных знаков. В начае намотки, когда вес рулона неЗначителен, преобладает положительная телескопичность, величина которой под действием возрастающего веса рулона убывает. Датчик 4 веса может быть тензорезисторным, магнитострикционным или представлять собой измеритель длины материала на барабане, имеющий блок для вычисления веса рулона через геометричные размеры полосы и удельный вес. Датчик 5 натяжения полосы может быть магнитострикционным или в виде датчика тока якоря электропривода барабана моталки. Датчик 6 угла поворо.та барабана может быть аналоговым или цифровым в виде импульсатора. Вычислительный блок 11 представляет собой цифровой автомат, содержащий устройство управления, элементы памяти и арифметические устройства, В качестве вычислительного блока может быть применен блок типа 3j;eKTpoника. Устройство работает следукицим образом, В блок 7 ввода постоянных величин вводят номинальнуто толщину полосы и требуемую величину раствора линеек 9, определяемую номинальной шириной полосы, В сумматор 12 вводят величину веса барабана G, во второй умножитель 15 вводят величину произ, характеризующую осоведениябенности данной моталки: длину барабана, модуль упругости Е материала барабана, момент инерции 3 сечения ба рабана, В третий умножитель 16 вводят величину coscL-sfnel, в третий сумматор 18 вводят величину Од, По команде оператора исполнительный блок 8 произ водит установку необходимого раствора линеек 9 и центрует .их положение от носительно оси прокатки. После захвата полосы моталкой срабатывает датчик 4 веса полосы, датчик 5 натяжения полосы и начинается отсчет угла поворота бара1бана датчиком 6, Сигнал текущего веса рулона поступает с датчика 4 на первый вход вычислительного блока 11, т,е, на вход первого сзтмматора 12, где производится вычисление суммл Су +Gp, результат которого поступает на первый вход второго сумматора 13, Сигнал с датчика 5 натяжения пйступает на второй вход вычислительного блока 11, т„е, на входы второго 15 и третьего 16 умножителей, В третьем умножителе J6 происходит вычисление произведения Т (costfL-sinoL), результат которого поступает на второй вход второго сумматора 13 с выхода KOTOpojo вычисленный результат сум мы Т (cosci-sindQ + (GffGp) поступает на первый вход первого сумматора 14, Результат вычисления произведения-- -Т во втором умножителе 15 . поступает на второй вход первого умножителя 14, Сигнал с датчика 6 угла поворота поступает на третий вход вычислительного блока , т,е, на первый вход четвертого умножителя 17, на второй вход которого поступает сигнал о величине, введенной в блок 7 толщины полосы, В четвертом умножителе 17 происходит вычисление произведения , результат которого поступает в третий сумматора 18, результат с выхода которого поступает натретий вход первого умножителя 14, В первом умножителе 14 происходит вычисление выражения (3) по результатам вычисления, поступивших на первый, второй и третий его входы. Результатом вычисления в первом умножителе 14 является величина смещений (tub) направляющих линеек 9, необходимого для умень шения телескопичности. Сигнал с выхода блока 11 поступает на первый вход исполнительного блока 8, который производит смещение направляющих линеек в требуемую сторону в плоскости прокатки на направлении, перпендикулярном оси прокатки. Причем линейки 9 перемещаются, сохраняя заданный раствор , воздействуя на боковую поверхность полосы 1 и смещая ее в нужном направлении. При этом телескопичность сматываемого рулона уменьшается. Частота корректировки положения линеек 9 определяется необходимой точностью регулирования, устойчивостью выбранной схемы регулирования. После окончания смотки линейки возвращаются в исходное положение, определяемое уставкой оператора. При появлении новой полосы на барабане 3 работа устройства повторяется в том же порядке. Таким образом, введение в устройство управления установкой направляющих линеек датчиков веса, натяжения и угла поворота барабана и вычислительного блока позволяет про(зводить корректировку положения направляющих линеек перед моталками в плоскости прокатки в направлении, перпендикулярном оси прокатки, и тем самым воздействовать на вход полосы в моталку, смещая полосу в направлении, уменьшающем телескопичность рулона. Применение предлагаемого устройства позволяет предотвратить возникновение телескопичности рулона вследствие изгиба консолей барабана моталки и тем самым уменьшить потери металла в среднем на 0,5%.
Формула изобретения
Устройство управления установкой направляющих линеек, содержащее блок ввода постоянных величин, выход которого соединен с исполнительным блоком , отличающееся тем, что, с целью повышения качества смотки полосы в рулон за счет уменьшения телескопичности рулона, оно дополнительно снабжено датчиком текущего веса полосы, наматываемой на барабан, датчиком натяжения полосы при смотке, датчиком угла поворота барабана и вычислительным блоком, причем датчик веса полосы соединен с первым входом вычислительного блока, второй вход которого соединен с выходом датчика натяжения полосы, третий вход соединен с датчиком угла поворота барабана
четвертый вход соединен с блоком ввода постоянных величин, а выход соединен с первым входом исполнительного блока, второй вход которого соединён с выходом блока ввода постоянных величин.
Источники информации, принятые во внимание при экспертизе
J. Филатов А.С. и др. Система ав-. томатической стабилизации положения полосы на сматывающих устройствах. Сталь, 1979, ff 2, с. 129-130.
2.Авторское свидетельство СССР № 309843, кл. В 29D 7/26, 1969.
3.Денис В.Д. и др. Алгоритм управления электроприводом мо.талки, минимизирующий телескопичность рулона. Вестник Львовского политехнического института. Львов, Вища школа, 1977 № 8/127, с. 61-67. 4.Макагон В.Г. и др. Механическое оборудование широкополосиых станов горячей прокатки. М., Металлургия, 1969, с. 158-159.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема съемной тележки моталки | 1981 |
|
SU988403A1 |
| Устройство для автоматического управления моталкой непрерывного стана холодной прокатки | 1984 |
|
SU1202653A1 |
| СПОСОБ БОКОВОГО НАПРАВЛЕНИЯ ПОЛОСЫ ПРИ ЕЕ БЕЗОСТАНОВОЧНОМ ПЕРЕМЕЩЕНИИ РОЛЬГАНГОМ ПРЕИМУЩЕСТВЕННО ОТ КЛЕТИ К МОТАЛКЕ ДЛЯ ДАЛЬНЕЙШЕЙ СМОТКИ В РУЛОН | 1999 |
|
RU2197349C2 |
| Устройство для коррекции уставки натяжения на моталке стана холодной прокатки | 1982 |
|
SU1050771A1 |
| Устройство измерения средней толщины проката | 1983 |
|
SU1068192A1 |
| Устройство для регулирования натяжения полосы при смотке в рулон | 1982 |
|
SU1044362A2 |
| Устройство для регулирования натяжения полосы при намотке в рулон | 1981 |
|
SU956091A1 |
| Устройство для управления моталкой прокатного стана | 1981 |
|
SU984533A1 |
| Устройство для регулирования натяжения полосы на моталке листопрокатного стана | 1982 |
|
SU1041188A1 |
| Способ определения массы материала, сматываемого на барабан моталки | 1982 |
|
SU1030663A1 |