(54) УСТРОЙСТВО КОНТРОЛЯ ОБРЫВА
И ПРОБУКСОВКИ ЛЕНТЫ КОНВЕЙЕРА Изобретение относится к средствам автоматизации непрерывного транспорта, в частности к средствам контроля движения тяговых и груэонесущих орга нов. Известно устройство Контроля движения тяговых и груэонесущих органов 13Однако устройство отличается значительной сложностью конструкции, обусловленной использованием двух датчиков скорости,ждущего мультивибратора, умножителя частоты, преобразователя частоты в постоянный ток, усилителей-ограничителей, интеграторов, пороговых и исполнительшдх элементов, что снижает надежность устройства и затрудняет эксплуатацию. Кроме того, применение кинематической связи датчиков скорости с лен той конвейера снижает надежность . контроля при нарушении такой связи. Известно также устройство контроля об1иава и пробуксовки ленты конвейера, содержащее датчики вращения приводного элемента и движения тягового органа, в качестве которых использованы дискретные преобразовате.ли перемещения, и. блок сравнения. выполненный на сутдаирукидем счетчике импульсов, причем выход блока сравнения соединен с реле останова привода через усилитель, В счетчик Зсшисывают импульсы, сформированные датчиком вращения приводного элемента, поступающие на, вход счетчика с частотой, пропорциональной скорости вращения приводного элемента На вход сброса счетчика подают ичшульсы, сформированные датчиком движения тягового opгaнa следующие с ЧАСТОТОЙ, пропорциональной скорости перемещения тягЪвого органа. Если число, записываемое в счетчик между импульсами сброса, соответствует коду допустимого пр 3скгильзывания, то иа выходе блока сравнения после дешифрирования действует сигнал, недостг точный для включения реле останова привода. Если в результате увёяячеякя проскальзывания, обрыва или остановки тягового органа происходит сбой в подаче импульса сброса, число записываемое в счетчик, отлично от кода ДОПУСТИМО1-О проскальзывания,что приводит к изменению сигнала на выходе блока сравнения и к срабатыванию реле остайова Г2.
Устройство имеет следующие недостатки: необходимость использования двух датчиков, в качестве которых применены дискретные преобразователи перемещения, являющиеся достаточно сложными электронными устройств ми{. сложность конструкции блока сравнения,в качестве которого испольэован суммирующий счетчик импульсов дешифратором,определяющим код допустимого проскальзывания возможность записи в счетчик сигнала помехи,приводя15§я к ложному срабатыванию системы контроля.
Цель изобретения - упрощение конструкции и повьяиение помехоустойчивости.
Поставленная цель достигается тем что устройство снабжено схемой ИЛИ, двумя времязадающими RC-цепями, инверторами и разделительными диодами, при этом блок сравнения выполнен на операционном усилителе, неинвертирующий вход которого через схему ИЛИ подключен к времязадающим RC-цепям, которые через разделительные диоды соединены с последовательно подключенными к датчику движения тягового органа инверторами.
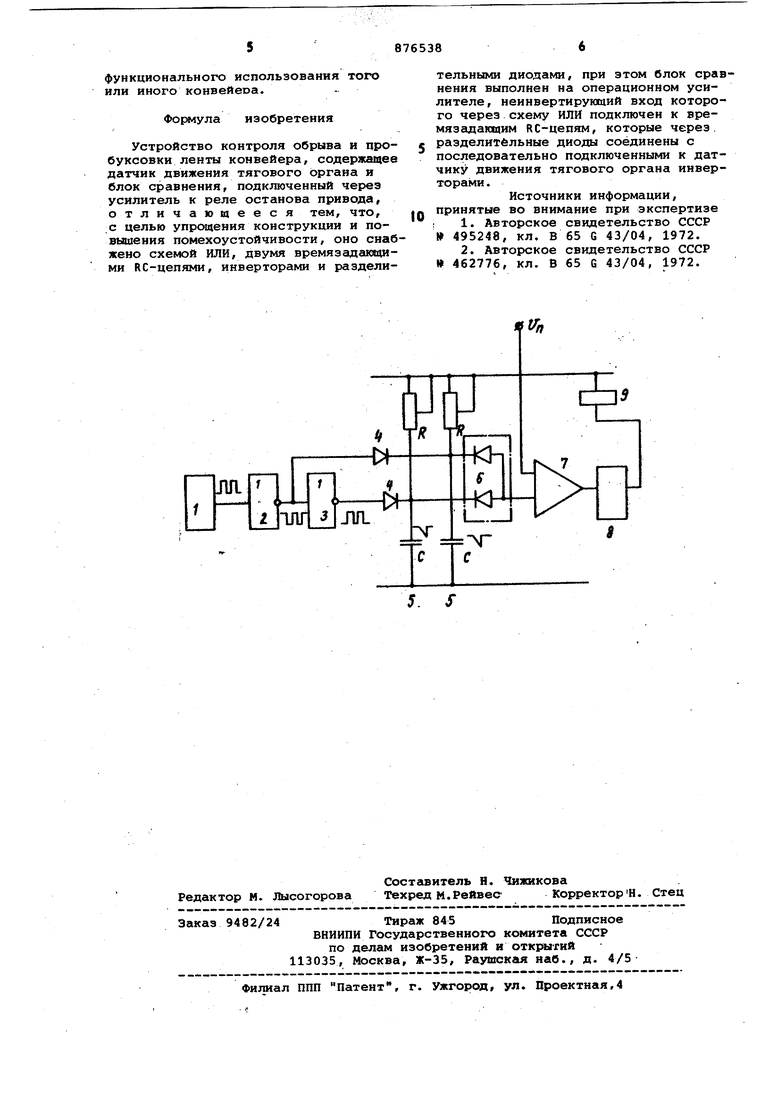
На чертеже приведена схема,поясняющая работу устройства контроля обрыва, и пр.обуксовки ленты конвейера
Устройство содержит датчик 1 движения тягового органа, в качестве которого использован дискретный преобразЬватель перемещения, инверторы 2 и 3, разделительные диоды 4, времязадающие RC-цепи 5, схему ИЛИ 6, бло
7сравнения, выполненный на операционном усилителе,усилитель 8, реле У останова привода.
,Работа устройства заключается в Следующем.
При движении тягового органа и поданном питании датчик 1 движения тягового органа формирует импульсы,ко торые подаются на вход инвертора 2 и после инвертирования на вход инвертора 3. Выходы инверторов 2 и 3 через разделительные диоды 4 подключены к времязадающим RC-цепям 5.
8зависимости от уровня сигнала, действующего на выходах инверторов происходит заряд конденсатора той или иной RC-цепи.
Например, если на выходе инверторг 2 действует сигнал, соответствующий логической 1, заряжается конденсатор RC-цепи, подключенный к данному инвертору. При этом конденсатор другой RC-цепи разряжен, поскольку он подключен к выходу инвертора 3, на котором действует сигнал, соответствующий логическому О или открытому состоянию транзистора.
Постоянная времени каждой RC-цепи выбирается таким образом, что импульсы, формируемые датчиком 1 движения тягового органа, сбрасывают отсчет интервала в ноль при минимальс но допустимой скорости ленты конвейера. В результате этого уровень напряжения на заряжаемом конденсаторе,подводимый через схему ИЛИ б к неинвертирующему входу операционного усилиQ теля If не достигает значения порога срабатывания операционного усилителя, который устанавливается потенциалом, подводимым к инвертирующему входу последнего. Как только в результате остановки или пробуксовки
5 ленты конвейера происходит Сбой в подаче импульсов с датчика движения тягового органа, один из конденсаторов времязадающих RC-цепей заряжается до уровня срабатывания операционного усилителя и на выходе
последнего появляется сигнал,включающий реле 9 останова привода.
Разделение импульсов, формируемых датчиком, по двум сдвинутым по
5 фазе каналам и использование двух времязадающих RC-цепей, отрабатывающих временные интервалы, в соответствии с фазой импульса, сделано для того, чтобы устройство реагировало на изменение скорости движения ленты конвейера как в моменты подачи импульсов, так и в интервалы между ними, поскольку нарушения движения ленты может происходить в моменты, когда датчик не формирует импульс.
При подаче в схему устройства сигнала помехи во время нормального движения ленты конвейера происходит сброс отсчета временного интервала в ноль раньше положенного времени с возобновлением заряда конденсатора до прихода импульса, формируемого датчиком. Появление сигнала помехи при нарушении движения ленты затягивает срабатывание реле останова привода не дольше
5 интервала времени, отрабатываемого RC-цепью. И в том и в другом случае сигнал помехи не оказывает практически никакого влияния на достоверность контроля.
При необходимости автоматического
регулирования скорости, перемещения ленты конвейера в устройство контроля вводится управляющий сигнал, определяющий порог срабатывания и согласующий работу устройства со скоростью движения конвейера. Сигнал поступает
от системы автоматического управления конвейера, например, от ЭВМ, и подается на инвертирующий вход операционного усилителя.
Использование предлагаемого устройства контроля обрыва и пробуксовки ленты конвейера в условиях производства обеспечивает снижение времени простоев конвейеров, при этом технико-экономический эффект зависит от
функционального использования того или иного конвейетэа. .
Формула изобретения
Устройство контроля обрыва и пробуксовки ленты конвейера, содержащее датчик движения тягового органа и блок сравнения, подключенный через усилитель к реле останова привода, отличающееся тем, что, с целью упрощения конструкции и повышения помехоустойчивости, оно снабжено схемой ИЛИ, двумя времязадающими RC-цепями, инверторами и разделительными диодами, при этом блок сравнения выполнен на операционном усилителе, неинвертиругаций вход которого через схему ИЛИ подключен к времязадающим RC-цепям, которые через, разделительные диоды соединены с последовательно подключенными к датчику движения тягового органа инверторами.
Источники информации, принятые во внимание при экспертизе : 1. Авторское свидетельство СССР 495248, кл. В 65 G 43/04, 1972.
2. Авторское свидетельство СССР 462776, кл. В 65 G 43/04, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реле пробуксовки ленточного конвейера | 1976 |
|
SU653185A1 |
| Способ пуска конвейера | 1984 |
|
SU1221094A1 |
| Устройство для контроля состояния распределенных объектов | 1985 |
|
SU1285509A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ НЕПОДВИЖНОГО СОСТОЯНИЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2051473C1 |
| УСТРОЙСТВО для КОНТРОЛЯ СКОРОСТИ ШАХТНЫХКОНВЕЙЕРОВ | 1968 |
|
SU206668A1 |
| БЛОК УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2001 |
|
RU2206936C2 |
| Реле пробуксовки ленточного конвейера | 1972 |
|
SU495248A2 |
| УСТРОЙСТВО для ИСКРОБЕЗОПАСНОГО УПРАВЛЕНИЯ КОНВЕЙЕРОМ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙ ЛИНИИ | 1969 |
|
SU248038A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАХТНЫМИ КОНВЕЙЕРНЫМИ ЛИНИЯМИ | 1968 |
|
SU208070A1 |
| УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2018961C1 |
