(54) РУЧКА УПРАВЛЕНИЯ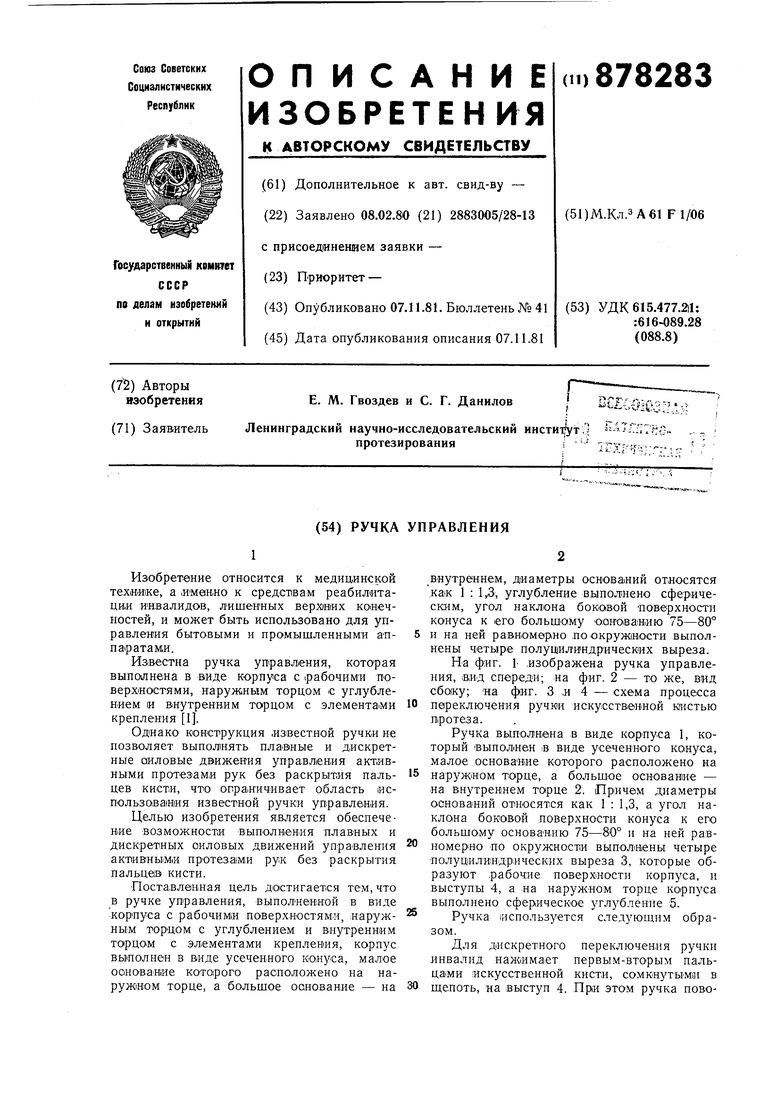
| название | год | авторы | номер документа |
|---|---|---|---|
| Рукоятка управления для безруких | 1979 |
|
SU827059A1 |
| Ручка для кухонных приспособлений | 1980 |
|
SU921511A1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ПРОТЕЗ КИСТИ | 1971 |
|
SU299220A1 |
| ИСКУССТВЕННАЯ КИСТЬ | 2000 |
|
RU2189797C2 |
| Ручка для дверцы | 1978 |
|
SU778731A1 |
| ПЛАСТИКОВАЯ ЕМКОСТЬ СО ВСТРОЕННЫМИ РУЧКАМИ | 2015 |
|
RU2677717C2 |
| Имплантат для метафизарной фиксации большеберцового компонента эндопротеза коленного сустава и держатель для его установки | 2021 |
|
RU2778604C1 |
| Искусственная кисть | 1977 |
|
SU664648A1 |
| АКТИВНАЯ КИСТЬ ДЛЯ ПРОТЕЗОВ | 1965 |
|
SU171976A1 |
Изобретение относится к медицинской техмгиже, а ,имви.но к средствам реабилитации инвалидов, лишенных верхних кояечностей, и может быть использовано для управлевия бытовыми и промышленными аппарата м.и.
Известна ручка управления, которая выполнена в виде корпуса с рабочими поверхностями, наружным торцом с углублением и внутренним торцом с элемента1ми крепления 1.
Однако конструкция .известной ручки не позволяет выполнять плавные и дискретные аиловые движения управлевия активными протезами рук без раскрытия пальцев кисти, что ограничивает область использ(ва1Н1ия известной ручки управления.
Целью изобретения является обеспечение возможности выполнения плавных и дискретных силовых управления активными протезами рук без раскрытия пальцев кисти.
Поставлеиная цель достигается тем, что в ручке управления, выполненной в виде корпуса с рабочими .поверхностями, наружным торЦом с углублением и внутренним торцом с элементами крепления, корпус выполнен в виде усеченного конуса, малое основание которого расположено на наружном торце, а большое основание - на
внутреннем, диаметры оснований относятся как 1 : 1Д углубление выпол1нено сферическим, угол наклона боковой поверхности конуса к его большому основанию 75-80° 5 и на ней равномерно .поокруж1Н1Ости выполнены четыре полуцилиндрических выреза.
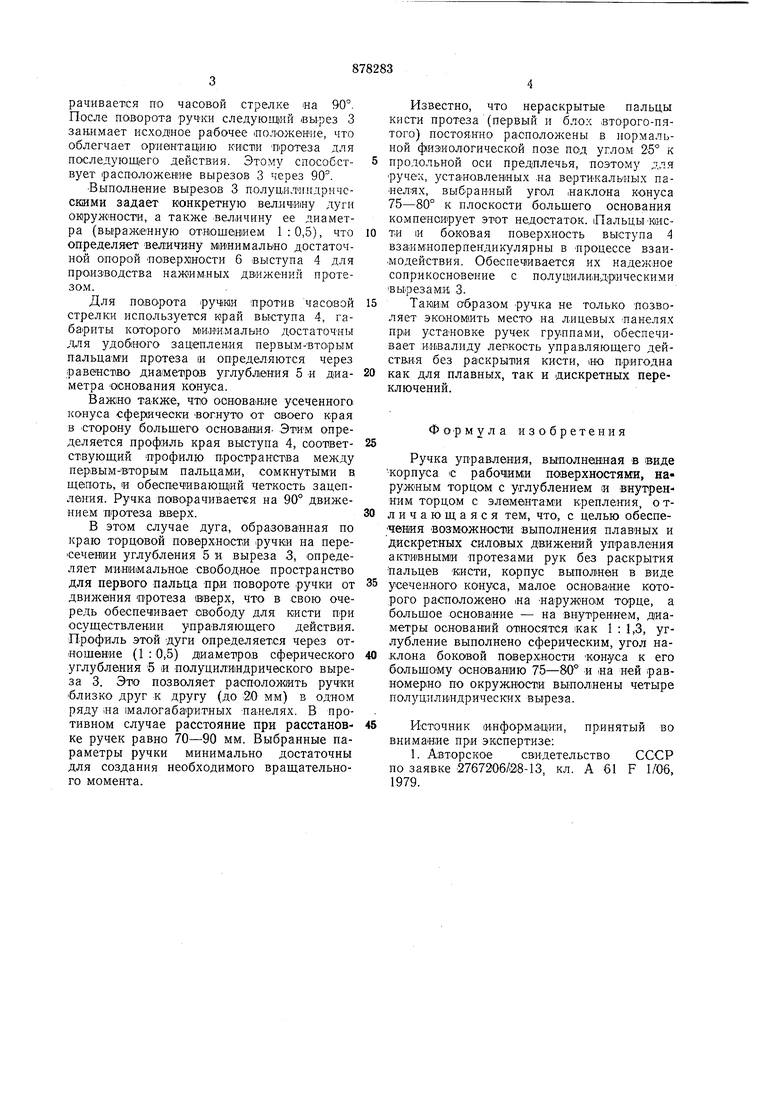
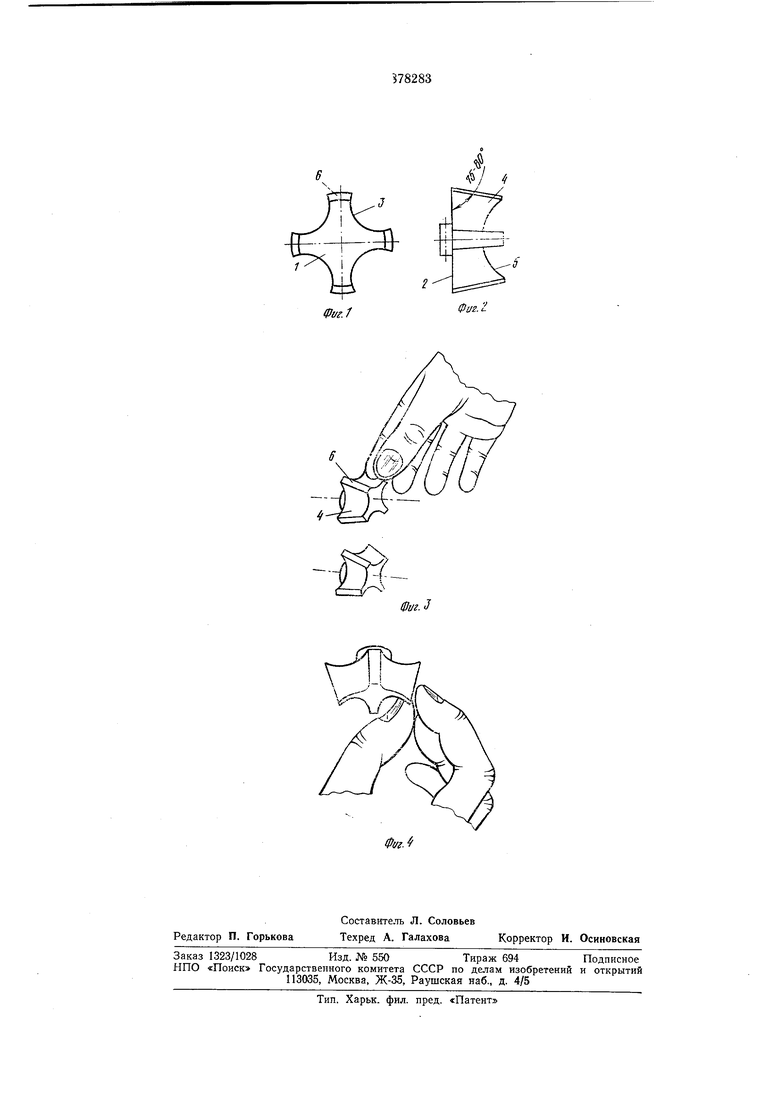
На фиг. 1- изображена ручка управления, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 .и 4 - схема процесса
10 переключения ручки искусственной протеза.
Ручка выполнена в виде корпуса 1, который выполнен в виде усеченного конуса, малое основание которого расположено на
15 наружном торце, а большое основание - на внутреннем торце 2. Причем диаметры оснований относятся как 1 : 1,3, а угол наклона боковой поверхности конуса к его большому основанию 75-80° и на ней рав20номерно по окружности выполнены четыре иолуцилиндрических выреза 3, которые образуют рабочие поверхности корпуса, и выступы 4, а на наружном торце корпуса выполнено сферическое углубление 5.
%
Ручка используется следуюш,им образом.
Для дискретного переключения ручки инвалид нажимает первым-вторым пальцами искусственной кисти, сомкнзтыми в
30 щепоть, на выступ 4. При этом ручка поворачивается по часовой стрелке «а 90°. После поворота ручки следующий вырез 3 занимает исходное рабочее положение, что облегчает ориентацию кисти таротеза для последующего действ:ия. Этому способствует расположение вырезов 3 через 90.
Выполнение вырезов 3 полуцилипдричсскими задает конкретную велич яу дуги окружности, а также величину ее диаметра (выраженную отнощевием 1:0,5), что определяет вел ичину м1И1НимальНО достаточной опорой -поверхнасти 6 выступа 4 для производства нажимных движений протезом.
Для повОрота яротив часовой стрелки используется край выступа 4, габариты которого М1И.1-гИ:Мально достаточ«ы для удобного зацепления первым-вторым пальцами протеза н определяются через равенство диаметров углублания 5 -и диаметра ocHOBiaHHH конуса.
Важно также, что ооновалие усеченного, конуса сферически вогнуто от овоего края в сторону большего основания. Этим определяется проф:иль края выступа 4, соответствующий Профилю пространства между первым-вторым пальцами, сомкнутыми в щепоть, и обеспечивающий четкость зацепления. Ручка поворачиваете я на 90° движением Протеза вверх.
В этом случае дуга, образованная по краю торцовой поверхности ручки на пересечении углубления 5 и выреза 3, определяет мИНИ1мальнае свободн10е пространство для первого пальца при повороте ручки от движения протеза юверх, что в свою очередь обеспечивает свободу для кисти при осуществлении управляющего действия. Профиль этой дуги определяется через отношение (1:0,5) диаметров сферического углубления 5 и полуцияиядрического выреза 3. Это позволяет располож)ить ручки близко друг к другу (до 20 мм) в одном ряду на малогабаритных -панелях. В противном случае расстояние при расстановке ручек равно 70-90 мм. Выбранные параметры ручки минимально достаточны для создания необходимого вращательного момента.
Известно, что нераскрытые пальцы кисти протеза (первый и блох 1второго-пятого) постоянно расположены в нормальной физиологической позе под углом 25° к продольной оси предплечья, поэтому для ручек, установленных на вертикальных панелях, выбранный угол наклона конуса 75-80° к плоскости большего основания компенсирует этот недостаток. (Пальцы «исти 1И боковая поверхность выступа 4 вза;имноперпендикулярны в процессе взанмодействия. Обеспеч1ивается их надежное соприкосновение с полуцилиндрическими вырезами 3.
Так1И;М образом ручка не только позволяет экономить место на лицевых панелях при установке ручек группами, обеспечивает инвалиду легкость управляющего действня без раскрытия кисти, но пригодна как для плавных, так и дискретных переключений.
Формула изобретения
Ручка управления, вы-полпенная в 1виде корпуса (С рабоч1им;и поверхностями, наружным торцом с углублением и внутренним торцом с элементами крепления, о тличающаяся тем, что, с целью обеспеченмя возможности выполнения плавных и дискретных силовых движений управления активными протезами рук без раскрытия пальцев кисти, корпус выполнен в виде усеченного конуса, малое основа-ние которого расположено на наружном торце, а большое основание - на внутреннем, д иаметры оснований относятся 1как 1 : 1,3, углубление выполнено сферическим, угол наклона боковой поверхности конуса к его большому основанию 75-80° и на ней равномер:но по окружности выполнены четыре полуцилиндрических выреза.
Источник (Информации, принятый во внимание при экспертизе:
Фиг.1
Фиг. 2
