I
Изобретение относится к машиностроению и может быть использовано для контроля геометрических параметров деталей в труднодоступнее месте с необходимостью дистанционного управления датчиком.
Известен датчик линейных перемещений, содержащий корпус, устайовленный в нем с возможностью вращения вал, имекяций на одном конце резьбу, закрепленный на середине вала с возможностью поворота измерительный рычаг, размещенные на валу по обе стороны от рычага пружины круче-, ния, одни концы которых закреплены на рычаге, а другие - на корпусе, предназначенные для создания измерительного усилия на рычаге, и измерительный преобразователь, взаимодействующий с рычагом f 1 . Даиный датчик является ближайшим по технической сущности к изобретению.
В данном датчике отсутствует механизм фиксации измерительного ры2
чага в нерабочем положении и безударного, дистанционного приведеш я его в рабочее положение, что приводит к возникновению ударных нагрузок при приведении рычага в рабочее положение.
Целыо изобретения является фиксация рычага в нерабочем положении и безударное, дистанционное приведение его в рабочее положение.
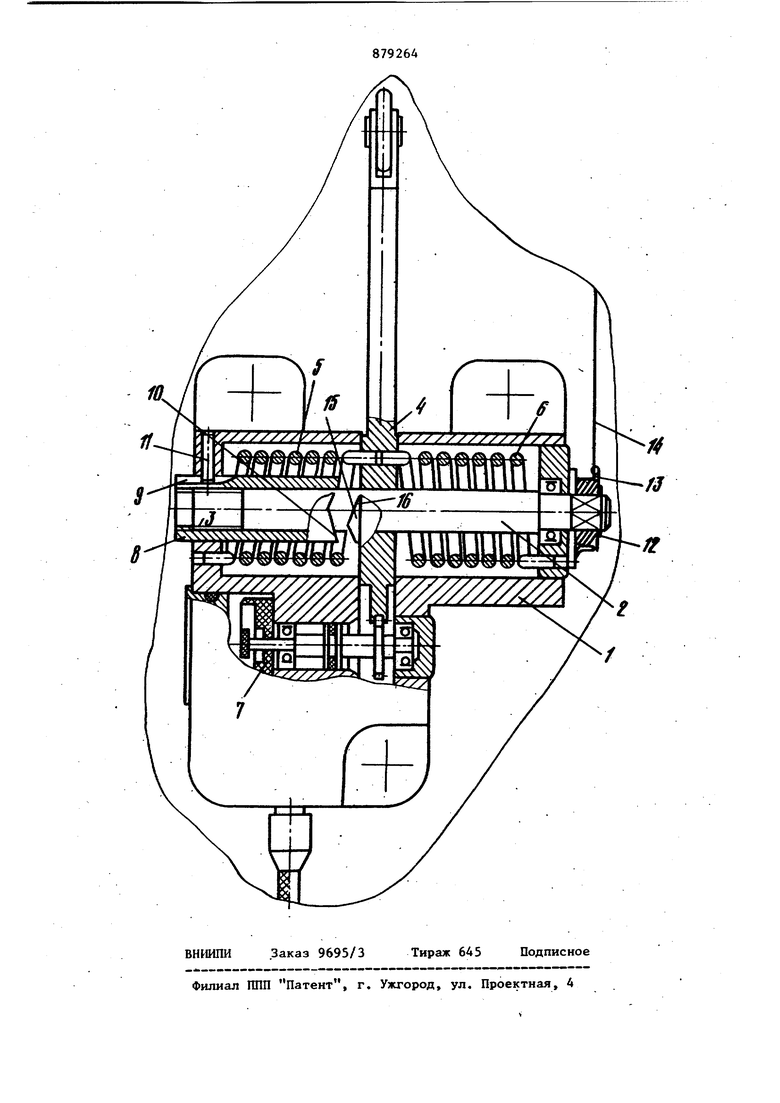
Поставленная цель достигаа.сся тем,10что датчик линейных перемедений снабжен навинченной на конец вала с резьбой втулкой, имеющей на одном конце продольный паз на наружной цилиндрической поверхности, а на другом кон15це, обращенном к рычагу, - торцовую винтовую поверхность, жестко закрепленным в корпусе штиАтом, свободный конец которого размещен в пазу втулки, жестко закрепленным на друЛгом конце вала барабаном, имеющим сквозное диаметральное отверстие, размещенной в зтом отверстии чекой, закрепленным на чеке и намотанным .на 38 барабан тросом и жестко закрепленной на рычаге фиксирукяцей втулкой, имеющей торцовую винтовую поверхность, взаимодействующую с торцовой винтово поверхностью резьбовой втулки. На чертеже показана схема датчика . линейных перемещений. Датчик содержит корпус I, установленный в нем вал 2 с резьбой 3 на конце, закоеплен1Шй на валу 2 иэмерительный рычаг 4, контактирухщий в процессе контроля-с измеряемой повер ностью, пружины 5 и б кручения, пред назначенные для создания измерительного усилия на рычаге 4, измерительный преобразователь 7, взаимодейству ющий с рычагом 4, навинченную на вал 2 резьбовую втулку .8, имеющую продольный паз 9 и торцовую виитовую поверхность 10, закрепленный в корпусе I штифт 11, свободами конец которого размещен в пазу 9, жестко за|1фепленный на валу 2 барабан 12,имею щий сквозное диаметральное отверстие размещенную в зтом отверстии чеку 13 закрепленный на чеке трос 14, закреп ленную на ступице рычага 4 фиксирую-, щую втулку 15 с торцовой винтовой поверхностью 16. Датчик работает спедумар1м образом В исходном состоянии втулка 8 на,Ю1нчена на вал 2 таким образом, что торцовые винтовые поверхности 10 иг I6 плотно приьспсают друг к другу и препятствуют повороту рычага 4 под действием пружин и 6 кручеиия. При зтом трос 14 намотан на барабан 12, а BTyjtka 8 фиксируется от поворота штифтом 11. После подачи на изнеритель ную позицию контролируемой детали (на чертеже не показаиа 7 тянут за трос 14. При этом вращается барабан 12 вместе с валом 2, что приводит к свинчиванию втулки 8 с вала 2 и ее поступательному перемещению относительне ятнфтв I1i Рв@етвяяи§ м§аду ftpUfежи mifif§8М1в црвермнеетвкв Ш и lli й§етен§1р© увеяйчиваетея, и рыча 4 плаянз Я0я0рачивается в сторону контролируемой детали. Когда поверхности 10 и 16 выйдут из зацепления, рычаг 4 будет контактировать с контролируемой деталью с измерительным усилием, развиваемым пружинами 5 и 6 кручения. Измерительный преобразователь 7 преобразует угол поворота рычага 4 в пропорциональный электрическийсигнап. Формула изобретения Датчик линейных перемещений,содержащий корпус, установленный в нем с возможностью вращения вал, имекщий на одном конце резьбу, закрепленный на середине вала с возможностью поворота измерительный рычаг, размещенные на валу по обе стороны от рычаса пружины кручения, одни концы которых закреплены на рычаге, а другие - на корпусе, предназначенные для создания измерительного усилия на рычаге, и измерительный преобразователь, взаимодействующий с рычагом, о т л и ч аю щ и и с Я. тем, что, с целью фиксации рычага в нерабочем положении и безударного дистанционного приве:дения его в рабочее положение, он снабжен навинченной на конец вала с резьбой втулкой, имеющей на одном конце продольный паз на наружной цилиндрической поверхности, а на другом конце, обращенном к рычагу, торцовую винтовую поверхность, жестко закрепленным в корпусе штифтом, сво-i бодный конец которого размещен в пазу втулки, жестко закрепленным на другом конце вала барабаном, имеющим сквозное диаметральное отверстие, размещенной в зтом отверстии чекой, закрепленным на чеке и намотанным на барабан тросом и жестко закрепленной ла рычаге фиксирующей втулкой, имеющей торцовую винтовую поверхность взаимодействующую с торцовой винторей пев§ркйеетйю резьбовой втулки. ИетвЧИЙКИ информадии, принятые во внимание при экспертизе 1. Агейкин Д.И. Датчики контроля и регулирования. М., Машиностроение, 1965, с. 30 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2098285C1 |
| Устройство для образования колец из тесьмы на швейной машине | 1975 |
|
SU526687A1 |
| БУКСИРНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2293662C1 |
| Соединительное устройство байонетного типа | 1977 |
|
SU742635A1 |
| ЯКОРНАЯ ЛЕБЕДКА | 2022 |
|
RU2786260C1 |
| Датчик линейных перемещений | 1985 |
|
SU1263992A1 |
| Устройство для сматывания и наматывания токоподводящего кабеля электропогрузчика | 1987 |
|
SU1546303A1 |
| Многозвенный механизм управления рабочими органами корнеклубнеуборочных машин | 1988 |
|
SU1724047A1 |
| Устройство для исследования буксования гусеничного транспортного средства | 1976 |
|
SU652459A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 1993 |
|
RU2062974C1 |