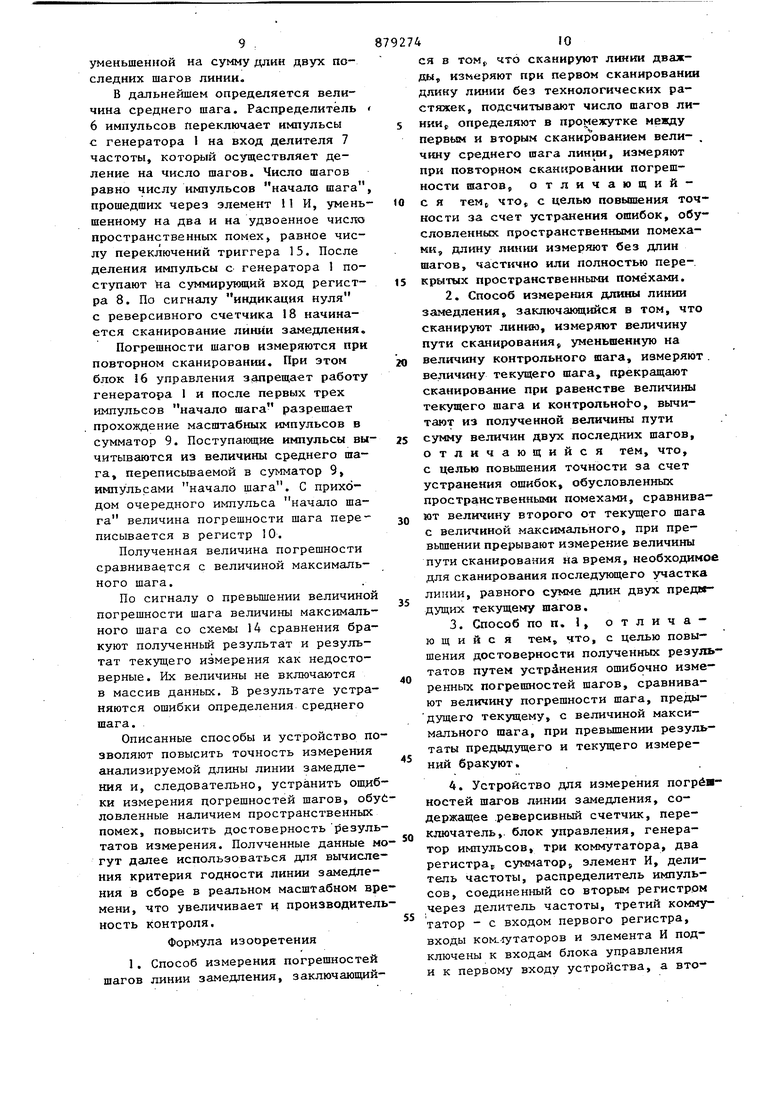
полученной величины пути сканирования величин двух роследних шагов. Способ осуществляется устройством; содержащим реверсивный счетчик переключатель, блок управления, генератор импульсов, три коммутатора, два регистра сумматор, элемент И, делитель частоты, распределитель импульсов, связанный с генератором импульсов, сумматоров, вторьм регистром делителем частоты, вторым комйутатором, соединеннымс сумматором, под- ключенным к регистрам, переключателю связанному с реверсивным счетчиком, блоком управления, соединенным со вторым входом устройства, коммутатор И вторым регистром элементом сумматором, генератором импульсов, реверсивным счетчиком, подключенным через первый коммутатор к генератору импульсов, второй вход первого комму татора объединен с входами других и подключен к первому входу устройства, а делитель частоты через тре. тий коммутатор соединен с первым регистром, связанным с элементом И, Данные способ и устройство имеют низкую точность контроля линий замедления в сборе, так как наличие, пространственных помех (пояски крепления диэлектрических стержней, локальные поглотители и т.п.) приводят к ошибке.измерения контролируемой дл ны линии, систематической ошибке изм рения погрешностей шагов и снижению достоверности полученной информации, ибо среди результатов измерения погр ностей -присутствузот недостоверные данные, число которых вдвое больше числа пространственных помех Целью изобретения является повыше ние точности и достоверности измерения путем устранения ошибок, обуслов ленных пространственными помехами. Указанная цель достигается тем. Что в способе измерения погрешностей шагов линии замедления, измеряют дли ну линии замедления без длин шагов, частично или полностью перекрытых пр странственнымй помехами. В способе измерения длины линии з медления сравнивают величину второго от текущего шага с величиной максимального шага, при превышении прерывают измерение величины пути сканиро вания на время, необходимое для сканирования последующего участка линии равного с.умме длин двух предьщущих текущему шагов. 4 Кроме того, при измерении погрешностей шагов линии замедления во время повторного -., сканирования сравнивают величину погрешности шага, предыдущего текущему, с величиной максималь ного шага, при превьш1ении результаты предыдущего и текущего измерений бракуют, В устройстве цель достигается тем, ЧТО оно снабжено четвертым коммутатором, вторым и третьим элементом И, схемой сравнения и триггером, выход которого соединен с первым и четвертым коммутатором, вторым элементом И, входом подключенным ко второму входу устройства, а выходом - к объединенным входам сумматора и второго регистра, выход которого через схему сравнения, третий элемент соединен с триггером, второй вход которого подключен к сумматору, вход схемы сравнения и элемента И связан с блоком управления, входы четвертого коммутатора подключены к генератору импульсов и первому входу устройства, а выход к распределителю импульсов. На фиг, 1 изображены временные диаграммы, поясняющие способ; на фиг, 2 - схема устройства, реализующего способ. Устройство состоит из генератора 1 импульсов, коммутаторов 2-5, распределителя 6 импульсов, делителя 7 частоты, первого регистра 8, сумматора 9, второго регистра 10, эле- ментов 11-13 И, схемы 14 сравнения триггера 15, блока 16-управления, переключателя 17, реверсивного счетчика 18. Выходы распределителя 6 импульсов соединены с вычитающим входом регистра 10 через делитель 7 частоты и коммутатор 5 с суммирующим входом регистра 8 и через коммутатор 4 - с входом сумматора 9, Импульсный вход распределителя 6 импульсов подключен к коммутатору 2, первый вход которого связан с выходом- генератора 1 импульсов и объединен с входом коммутатора 3 выход которого подключен к счетному входу реверсивного счетчика 18, Входы управления распределителя 6 импульсов соединены с выходом индикации нуля сумматора 9 и регистра 10. Входы коммутаторов 2-5 объединены и связаны с первым входом устройства. Второй вход устройства соединен с элементами 11, 12 И, блоком
16 управления. Один из управляющих входов коммутатора 3 объединен с входом элементов 11, 13 И, управляющим входом коммутатора 5 и подключен к выходу блока 16 управления, второй управляющий вход объединен с входом элемента 12 И, управляющим входом коммутатора 2 и соединен с выходом триггера 15. Первый установочный вход триггера 15 связан с элементом 13 И, а второй - с выходом индикации нуля сумматора 9. Информационный вход сумматора 9 соединен с выходом регистра 8 и входом переключателя 17. Вход тактирования сумматора 9 объединен с входом тактирования регистра 10 и подключен к выходу элемента 12 И. Вход тактирования регистра 8 подключен к выходу элемента 1I И. Вход регистра 10 соединен с выходом сумматора 9, а выход - с входом схемы 14 сравнения, второй вход которой подключен к блоку 16 управления, а выход - к элементу 13 И. Вход управления коммутатора 4 соединен с блоком 16 управления, подключенным к входу запуска генератора 1 импульсов, к входу управления направлением счета реверсивного счетчика 18. Входы блока 16 управления подключены к выходу индикации нуля реверсивного счетчика 18 и выходу переключателя 17, соединенному с установочными входами реверсивного счетчика 18.
Сущность способов заключается в следующем.
Сканируют линию измерения дважды. При сканировании вырабатываются масщтабные импульсы, характеризующие величину перемещения, и импульсы начало шага сигнализирующие о конце предыдущего и начале текущего шагов. Масщтабные импульсы поступают на первый вход устройства, импульсы начало шага - на второй.
При первом сканировании измеряют длину линии без технологическихрастяжек и длин шагов, частично или полностью перекрытых пространственньгми помехами.
Подсчитывают число шагов линии путем последовательного счета импульсов начало шага, при этом шаги технологических растяжек, а также шаги, частично или полностью перекрытые пространственными помехами, не входят в результат.,
Определяют в промежутке между первым и вторым сканированием величину
среднего шага путем деления длины линии на число шагов.
При повторном сканировании измеряют погрешности шагов линии относительно среднего.
Реверсивный счетчик 18 предназначен для измерения величины пути сканирования. Переключатель J7 подключает один из выходов регистра 8 в зависимости от априорных данных по контролируемой партии линий на установочный вход счетчика 18 и на вход блока 16 управления, задавая тем самым величину номинального шага. Регистр 8 предназначен для измерения при первом сканировании величины текущего шага, в промежутке между сканированиями вычисляет значение среднего шага, при повторном сканировании хранит значение
среднего шага. Сумматор 9 при первом сканировании хранит величину первого от текущего шага, при появлении пространственной помехи определяет длительности времени прерьшания измерения пути сканирования, в промежутке между первым и вторым сканированием вычитает поступающие импульсы из содержимого с индикацией нуля, при повторном сканировании измеряет погрешности шагов. Регистр 10 при первом сканировании хранит величину второго от текущего шага, определяет, при появлении пространственной помехи, длительность времени прорывания измерения величины пути сканирования, при повторном сканировании хранит величину погрешности первого от текущего шага.
Измерение длины линии осуществ.ляется путем измерения величины пути сканирования, уменьшенной на величину контрольного шага.
Для этого в начальный момент записывают через переключатель 17 в счетчик I8 величину контрольного шага, которая выбирается большей, чем максимальная длина пространственной помехи. Коэффициент запаса рекомендуется брать 1,5-2. Счетчик 18 включается на вычитание, работа генератора I запрещена. После прохождения начальной технологической растяжки, в данном случае это при первых импульсах начало шага (пропуск двух первых шагов), блок 16 управления переключает коммутаторы 3, 5 на пропуск масштабных импульсов. Счетчик 18 начинает вычитать поступающие импульсы из содержимого, после индикации нуля счетчика 18 блок 16 управления переключит его на суммирование. Таким образом, содержимое счет чика будет равно величине пути сканирования, уменьшенной на величину контрольного шага. Одновременно в регистре 8 измеря ются величины текущего шага, равные числу масштабных импульсов в промеж ке времени между соседними импульсами начало шага. Импульсы начало шага сдвигают результат измерейия в сумматор 9 и затем в регистр 10, В регистре 10 хранится величина второго от текущего шага. Сравнение величин этого шага с в личиной максимального шага, код которого задается оператором с блока 16 управления, происходит на схеме 14 сравнения. Сигнал о превьшении величины второго от текущего шага в личины максимального шага, которая выбира:ется болншей, чем шаг линии замедления, но меньшей, чем длина пространственной помехи, проходит со схемы 14 сравнения через элемент 13 И на триггер 15, переключая его. в единичное состояние. Триггер 15 прерывает измерение величины пути сканирования на время необходимое для сканирования участка линии, равного по длине сумме длин двух предыдущих текущему шагов. Это осуществляется переключе1шем коммутаторов 2. 3. После этого вход счетчика 18 подключается к выходу г нератора I, который выключен сигнал с блока 16 управления, т.е. импульс .в счетчик 18 не поступают. Масштабн импульсы через коммутатор 2 поступа ют на вход распределителя 6 импульсов . В данный момент времени в сумматоре 8 хранится величина остатка частично перекрытого следующего за пространственной помехой шага, а в регистре 9 - величина, равная сумме длин пространственной помехи и остатка частично перекрытого шага. На фиг. 16 изображены импульсы начало шага, формируемые при сканировании спиральной линии за едления с. пояском, на фиг. 1в - сигнал разрешения измерения величины пути сканирования. Распределитель 6 импульсов направляет масштабные импул через первый выход на вычитающий вход регистра 10, после индикации нуля которого масштабные импульсы ч рез коммутатор 4 подаются на вычита ющий вход сумматора 9, Сигнал индикации нуля содержимого сумматора 9 возвращает триггер 15 в исходное состояние. Таким образом обеспечивается условие равенства интервала времени прерьшания измерения величины пути сканирования участка линии замедления, равного по длине сумме длин дйух предыдущих текущему шагов. Во время прерывания измерения величины пути сканирования прохождение импульсов начало шага на входы тактирования сут 1матора 9 и регистра 10 запрещено сигналом с триггера 15 на элемент 12 И. После возврата триггера 15 в исходное состояние возобновляется измерение величины сканирования. При появлении очередной прострайственной помехи цикл прерывания повторяется, При равенстве величины измеряемого текущего шага величине максимального шага сканирование линии замедления прекращается. Сигнал о равенстве с одного из вьгходов регистра 8 через переключатель 17 поступает в блок 16 управления. По сигналу,с которого начинается вычитание из полученной величины пути сканирования суммы величины двух последних шагов, для чего блок I6 управления переключает коммутатор 3 на пропуск импульсов с генератора J, коммутатор 5 на пропуск импульсов с делителя частоты 7 переключает реверсивный счетчик 18 на вычитание, разрешает работу генератора 1, запрещает прохождение импульсов начало шага через элементы 1J, 13 И, Уменьшение длины линии на величину конечной растяжки осуществляется следующим образом. Импульсы с генератора 4 через коммутатор 2, распределитель 6 импульсов поступают на вычитающий вход регистра 10, в котором хранится величина предпоследнего шага, уменьшая его содержимое до нуля. По сигналу индикация нуля с регистра 10 распределитель 6 импульсов пропускает импульсы с генератора 1 через коммутатор 4 на вычитающий вход сумматора 9, в котором хранится величина последнего шага линии замедления. Одновременно импульсы с генератора 1 поступают, в реверсивный счетчик 18, уменьшая его содержимое. При равенстве содержимого сумматора 9 нулю число в реверсивном счетчике 18 равно величине пути сканирования. 9 . уменьшенной на сумму длин двух последних шагов линии. В дальнейшем определяется величина среднего шага. Распределитель 6 импульсов переключает импульсы с генератора 1 на вход делителя 7 частоты, который осуществляет деление на число шагов. Число шагов равно числу импульсов начало шага прошедших через элемент 11 И, умень шенному на два и на удвоенное число пространственных помех, равное числу переключений триггера 15. После деления импульсы с генератора 1 поступают на суммирующий вход регистра 8. По сигналу индикация нуля с реверсивного счетчика 18 начинается сканирование линии замедления. Погрешности шагов измеряются при повторном сканировании. При этом блок 16 управления запрещает работу генератора 1 и после первых трех импульсов начало шага разрешает прохождение масштабных импульсов в сумматор 9. Поступающие импульсы вы читываются из величины среднего шага, переписьшаемой в сумматор 9, импУльсами начало шага. С приходом очередного импульса начало шага величина погрешности шага переписывается в регистр 10. Полученная величина погрешности сравнивается с величиной максимального шага. По сигналу о превьшении величино погрешности шага величины максималь ного шага со схемы 14 сравнения бра куют полученньй результат и результат текущего измерения как недостоверные. Их величины не включаются в массив данных, В результате устра няются ошибки определения среднего шага. Описанные способы и устройство п зволяют повысить точность измерения анализируемой длины линии замедления и, следовательно, устранить ошл ки измерения погрешностей шагов, обу ловленные наличием пространственных помех, повысить достоверность резуль татов измерения. Полученные данные м гут далее использоваться для вычисле ния критерия годности линии замедления в сборе в реальном масштабном вр мени, что увеличивает и производител ность контроля. Формула изооретения 1. Способ измерения погрешностей шагов линии замедпения, заключающий 4 ся в томр что сканируют линии дважды, измеряют при первом сканировании длину линии без технологических растяжек, подсчитывают число шагов линки определяют в промежутке между первым и вторым сканированием величину среднего шага линии, измеряют при повторном сканировании погрешности шагов, отличающийс я TeMf что, с целью повышения точности за счет устранения ошибок, обусловленных пространственными помехами, длину лшиш измеряют без длин шагов, частично или полностью перекрытых пространственны ш помехами. 2.Способ измерения длины линии замедления, заключающийся в том, что сканируют лингао, измеряют величину пути сканирования, уменьшенную на величину контрольного шага, измеряют . величину текущего шага, прекращают сканирование при равенстве величины текущего шага и контрольноЬо, вычитают из полученной величины пути сумму величин двух последних шагов, отличающийся тем, что, с целью повышения точности за счет устранения ошибок, обусловленных пространственньми помехами, сравнивают величину второго от текущего шага с величиной максимального, при пре- вьш1ении прерывают измерение величины пути сканирования на время, необходимое для сканирования последующего участка линии, равного сумме длин двух предыдущих текущему шагов. 3.Способ поп. i, отличающий с я тем, что, с целью повышения достоверности полученных результатов путем устрАнения ошибочно измеренных погрешностей шагов, сравнивают величину погрешности шага, предадущего текущему, с величиной максимального шага, при превышении результаты предыдущего и текущего измерений бракуют. 4.Устройство для измерения погрбиностей шагов линии замедпения, содержащее .реверсивный счетчик, переключатель, блок управления, генератор импульсов, три коммутатора, два регистра сумматор, элемент И, делитель частоты, распределитель импульсов, соединенный со вторым регистром через делитель частоты, третий коммутатор - с входом первого регистра, входы ком--1утаторов и элемента И подлючены к входам блока управления к первому входу устройства, а второй вход устройства соединен с блоком управления и через элемент И с первым регистром, вьЬсод которого подклюнен к сумматору и через переключатель к блоку управления, реверсивному счетчику, вход которого через первый коммутатор связан с генератором импульсов, а выход - с 6nojcoM управления, соединенным с генератором ш пульсов, вход сумматора через второ коммутатор подключен к распределителю импульсов, а выход - ко второму . регистру и распр еделителю импульсов, отличающееся тем, что, с целью повышения точности и достоверности измерения за счет устранения ошибок , обусловленных пространственными помехами, оно снабжено четвертым коммутатором, вторым и третьим элементом И, схемой сравнения и триггером, выход которого соединен с первым и четвертым коммутатором, вСторым элементом И, входом додключенньм ко второму входу устройства, а выходом - к объединенным входам сумматора и второго регистра, выход которого через схему сравнения третий элемент соединен с триггером, второй вход которого подключен к сумматору, вход схемы сравнения и элемента И связан с блоком управления, входы четвертого коммутатора подключены к генератору импульсов и первому входу устройства, а выход к распределителю импульсов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 145011, кл. G 01 В 7/02, 1962.
2.Дж. Йендат, А.Пирсол. Измерение и анализ случайных процессов. М., Мир, 1974, с. 339.
3.Авторское свидетельство СССР № 634292, кл. G 06 F 15/46, 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля объектов | 1976 |
|
SU634292A1 |
| Устройство для измерения погрешностей шагов регулярных структур | 1979 |
|
SU789762A1 |
| Устройство для измерения функции распределения случайной погрешности аналого-цифровых преобразователей | 1984 |
|
SU1246370A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Способ регистрации временного акустического разреза и устройство для его осуществления | 1985 |
|
SU1323991A1 |
| Устройство для автоматического измерения погрешности фазовращателя | 1981 |
|
SU1179525A1 |
| Устройство аналого-цифрового преобразования | 1981 |
|
SU1012435A1 |
| СПОСОБ БЕСКОНТАКТНОГО ЦИФРОВОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2176089C1 |
| Устройство аналого-цифрового преобразования | 1982 |
|
SU1045378A1 |
| Устройство для измерения ошибки сведения лучей на экране цветного кинескопа | 1980 |
|
SU1042208A1 |
.ТбТО
фуе. f
пг
Minmnnj
ч
L
