(54) ЛИНЕЙНЫЙ ТЯГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| Тяговый линейный электродвигатель | 1976 |
|
SU599317A1 |
| Тормозное устройство грузовой тележки | 1979 |
|
SU781101A1 |
| Линейный электродвигатель | 1978 |
|
SU799087A1 |
| Линейный электрический двигатель | 1981 |
|
SU978287A1 |
| Устройство для подачи материала в зону обработки | 1988 |
|
SU1538965A1 |
| Автоматизированная установка для многономенклатурной штамповки деталей из полосового материала | 1987 |
|
SU1532152A1 |
| Устройство фиксации вторичного элемента линейного электродвигателя | 1983 |
|
SU1092675A1 |
| Линейный шаговый электродвигатель | 1989 |
|
SU1700706A1 |
| Линейный электродвигатель | 1983 |
|
SU1145422A1 |
| Промежуточный привод наклонного ленточного конвейера | 1982 |
|
SU1033389A1 |
1
Изобретение относится к области линейных электродвигателей, в частности к конструкции тягового линейного электродвигателя для монорельсовых дорог.
Известен линейный тяговый электродвигатель, содержащий индукторы, размещенные Б корпусе, компенсационные устройства, несущие и дистанционные ролики и вторичный элемент 1 .
Конструкция крепления магнитопроводов индукторов внутри Kopni ca предусматривает возможность их перемещения в боковом направлении относительно тягового рельса.
Недостатком такой конструкции является то, что удар, возникающий при включении электродвигателя и обусловленный силой электромагнитного притяжения, воспринимается корпусом электродвигателя и дистанционными роликами, что снижает надежность работы электродвигателя.
Известен также и другой линейный тяговый электродвигатель, содержащий индукторы с опорными плитами, размещенные в корпусе, компенсирующие устройства, несущие и дистанционные ролики, вторично элемент и устройства фиксации, каяадое иэ которым включает
установленные на корпусе подвижные клинья с подпружиненными тягами 2, Этот двигатель является наиболее близким по технической сущности к описываемому.
Каждое устройство фиксации э-того электродвигателя включает электромагниты якори которых жестко связаны с фиксирующими клиньями.
10
Недостатком такой конструкци1| является низкая надежность, так как электромагниты устройства фиксации требуют постоянного наличия напряжения питания и при исчезновении послед)5 него может произойти заклинивание электродвигателя, особенно в момент прохождения им закруглений малого ра,диуса.
Цель изобретения - повышение надежности работы линейного тягового электродвигателя.
Указанная цель достигается тем, что на спинке магнитопровода каждого индуктора выполнен паз, в котором установлен подпружиненный башмак, ук-. репленный на направляющем стержне, смонтированном на корпусе, причем башмак при помощи тросов связан через блоки с подпружиненными тягами
30 фиксирующих клиньев.
При нечетном числе пар полюсов двигателя магнитопровод индуктора выполнен с па.эом, имеющим ось, совпадающую с поперечной осью симметрии индуктора.
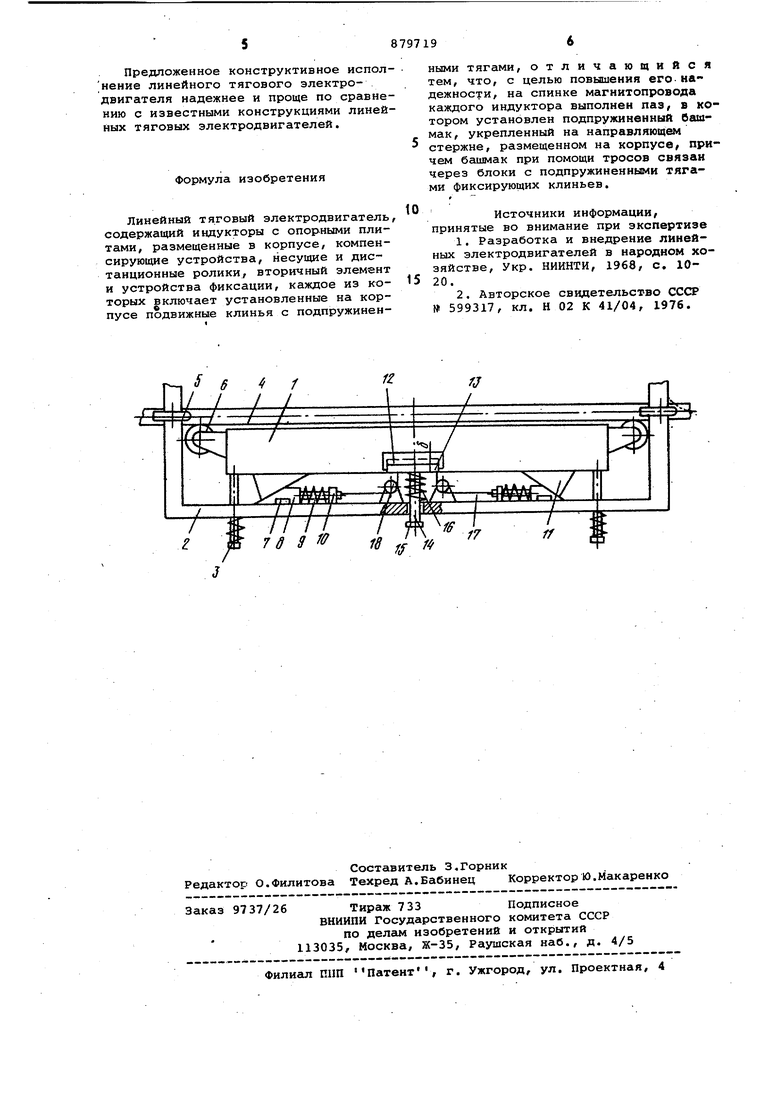
На чертеже изображен общий вид линейного тяговрго электродвигателя.
Так как при, двустороннем исполнении двигателя обе его части выполняются аналогичным образом, то на чертеже для наглядности показан только (ОДИН индуктор.
Линейный тяговый электродвигатель содержит индукторы 1, размещенные в корпусе 2 с компенсирующими устройствами 3, вторичный элемент 4, несущие 5 и дистанционные б ролики и устройства фиксации, каждое из которых содержит установленные на корпусе 2 в продольных направляющих 7 фиксирующие клинья 8, связанные с подпружиненными тягами 9.
Тяги 9 в свою очередь установлены в подшипниках скольжения 10, также укрепленных на корпусе 2.
Индукторы 1 снабжены опорпынАК плитами 11 и в спинках их магиитопроводов выполнены пазы 12, в которых установлены с гарантированным зазором (f башмаки 13. Баиилаки 13 укреплены на.направляющих стержнях 14, снабженных ограничителями 15 и установленных на корпусе 2. башглаками 13 и корпусом 2 расположены пружины 16. Башмаки 13 при помощи гибкой связи 17, например тросов, соединены через блоки 18, смонтированные на корпусе 2, с подпружиненными тягами 9.
Установка башмаков 13 в пазах 12 магнитопроводов индукторов 1 с гарантированным зазором d предотвратит возможные соприкасания башмаков 13 с дном пазов 12.
Целесообразно пазы 12 выполнять в магнитопроводе в местах максимальной индукции. Расчеты и опыты показали-, что в ярме магнитопровода, при любых режимах работы, имеются неизменные сечения с минимальными и максимальными значениями индукции. Причем участки с максимальными значениями индукции удалены от края индуктора 1 на нечетное число полюсных делений У .
Поэтому в линёйиьлх тяговых электродвигателях с нечетным числом пар полюсов магнитопровод индуктора 1 целесообразно выполнять с пазом 12, имеющим ось, совпадающую с поперечной осью симметрии индуктора 1 (показано на чертеже), а при четном числе пар полюсов - смещенную относительно поперечной оси симметрии на промежуток, равный Т/ . При этом паз 12 и башмак 13 можно разбивать на две части, расположенные симметрично относительно попере чой оси симметрии и удаленные друг от друга на расстояние, равное Т (на чертеже не показано) .
Устройство работает следующим образом.
При снятом питании с индукторов 1 OH.J опираются опорными плитгили 11 на фиксирующие клинья 8, которые препятствуют смещению индукторов 1 в боковом направлении относительно вторичного элемента 4, несмотря на то, что компенсирующие устройства 3 оттягивают их в этом направлении.
При подаче питания на индукторы 1 последние под воздействием сил электромагнитного притяжения стремятся притянуться к вторичному элементу 4.
Одновременно к магнитопроводам индукторов 1 притягиваются подпружиненные башмаки 13 (на чертеже показано пунктиром конечное положение). Башмаки 13 при помощи гибкой связи 17 выдвигают фиксирующие клинья из-под опорных плит 11 индукторов 1. Таким образом, индукторы 1 получают свободу и при наезде дистанционных роликов 6 на неровности вторичного эле- , мента 4 или при прохождении закруглений малого радиуса могут перемещаться в боковом направлении относительно вторичного элемента 4.
При снятии питания с индукторов 1, исчезает магнитное поле, а следовательно, исчеэает и электромагнитное притяжение башмаков 13 к спинке магнитопроводов индукторов 1 и соответственно индукторов 1 к вторичному элементу 4. Как башмаки 13, так индукторы 1 получают свободу перемещения, башмаки 13 под действием пружин тяг 9, а индукторы - пружин компенсирующих устройств 3. Однако при этом фиксирующие клинья 8 под действием пружин тяг 9 вдвигаются под опорные плиты 11 индукторов 1, а индукторы 1 остаются в прежнем положении.
Это связанос тем, что масса клиньев 8 по сравнению с массой индукторов 1 значительно меньше, следовательно меньше и их инерционность, поэтому фиксирующие клинья 8 окажутся под плитами 11 раньше, чем начнут перемещаться индукторы 1, тем самым предотвратив их перемещение в боковом направлении относительно вторичного элемента 4 и зафиксировав воздушный зазор между обесточенными индукторами 1 и вторичным элементом 4, равным зазору при включенных индукторах 1.
Таким образом, при подаче питания на индукторы 1 удара роликов 6 о вторичный .элемент 4 не произойдет,
Выталкивающая сила, которая появляется вследствие наклона поверхностей опорных плит 11 и фиксирующих клиньев 8, компенсируется силой трения и соответственно выбираемыми пружинами тяг 9.
Аналогичным образом выполняются линейные электродвигатели при одно,стороннем исполнении. Предложенное конструктивное испол нение линейного тягового электродвигателя надежнее и проще по сравне нию с известными конструкциями линей ных тяговых электродвигателей. Формула изобретения Линейный тяговый электродвигатель содержащий индукторы с опорными плитами, размещенные в корпусе, компенсирующие устройства, несущие и дистанционные ролики, вторичный элемент и устройства фиксации, каждое из которых включает установленные на корпусе подвижные клинья с подпружиненными тягами, отличающийся тем, что, с целью повышения его надежности, на спинке магнитопровода каждого индуктора выполнен паз, в котором установлен подпружиненный башмак, укрепленный на направляющем стержне, размещенном на корпусе/ причем башмак при помощи тросов связан через блоки с подпружиненными тягами фиксирующих клиньев. Источники информации, принятые во внимание при экспертизе 1.Разработка и внедрение линейных электродвигателей в народном хозяйстве, Укр. НИИНТИ, 1968, с. 1020. 2.Авторское свидетельство СССР 599317, кл. Н 02 К 41/04, 1976.
