(54) ХЛОПКОУБОГОЧНЫЙ АППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1979 |
|
SU824907A1 |
| Пневматический подборщик хлопка | 1990 |
|
SU1739889A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1140708A1 |
| Хлопкоуборочный аппарат | 1985 |
|
SU1263209A1 |
| Хлопкоприемный патрубок хлопкоуборочного аппарата | 1989 |
|
SU1761031A2 |
| Хлопкоуборочная машина | 1983 |
|
SU1181588A1 |
| Хлопкоуборочный аппарат с улавливателем хлопка-сырца | 1987 |
|
SU1604222A1 |
| Приспособление для улавливания хлопка к хлопкоуборочному аппарату | 1979 |
|
SU856405A1 |
| Рабочий орган хлопкоуборочного аппарата | 1986 |
|
SU1491387A1 |
| Приспособление к хлопкоуборочному аппарату | 1975 |
|
SU715053A1 |
I
Изобретение относится к сельскому хозяйству и может быть использовано в хлопкоуборочных машинах.
Известен хлопкоуборочный аппарат, содержащий последовательно смонтированные по направлению перемещения аппарата симметрично относительно его продольной оси с образованием рабочей щели щпиндельные барабаны с транспортными коридорами, средства сбора опавщего с кустов хлопка и сопла пневмоподборщиков и установленные под ними улавливатели хлопка, где каждый улавливатель выполнен в виде ленточного транспортера, лента которого на рабочей поверхности имеет щеточные злементы 1.
Недостатком этого аппарата является то, что из-за отсутствия эффективного воздействия воздущного потока на хлопковые дольки ирлнота сбора невысокая. Кроме того, для гарантированного захвата долек щеточными элементами улавливателей необходима поджимная поверхность, которая в известном аппарате отсутствует, в связи с чем часть хлопковых долек не подается к соплам пневмопатрубков.
Цель изобретения - повышение эффективности сбора хлопка хлопкоуборочным аппаратом.
Цель достигается тем, что каждый улавливатель выполнен в виде горизонтально смонтированного, щитка, а каждое средство сбора опавшего хлопка выполнено в виде вертикальной лопасти, контактирующей с поверхностью щитка и смонтированной на нем с возмож10ностью поперечного возвратно-вращательного перемещения относительно продольной оси аппарата, при этом патрубки сопел пневмоподборщиков связаны с транспортными коридорами соответствуюищх шпиндельных барабанов.
15
Привод возвратно-вращательного перемещения лопасти имеет угловой рычаг, шарнирно смонтированный на щитке посредством вертикальной оси, при этом одно плечо углового рычага установлено с перекрытием продольной
20 оси аппарата, а другое - с возможностью контактирования с лопастью, причем последняя подпружинена, а щиток снабжен ограничителем поворота углового рычага.
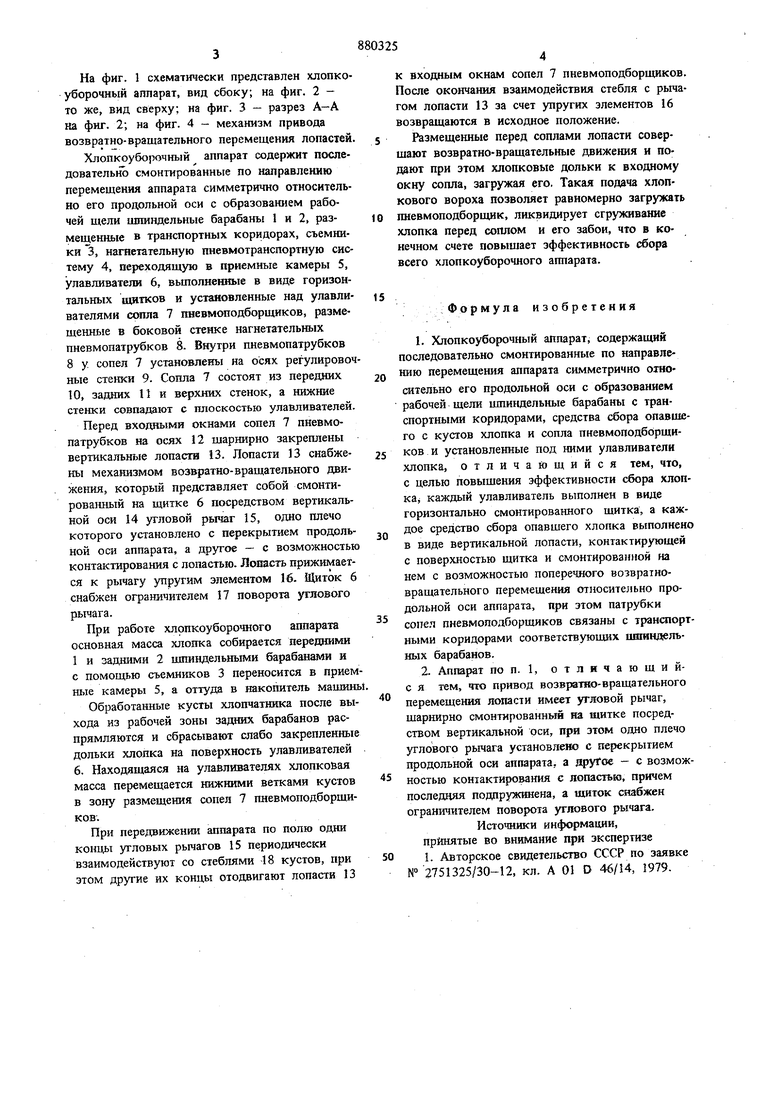
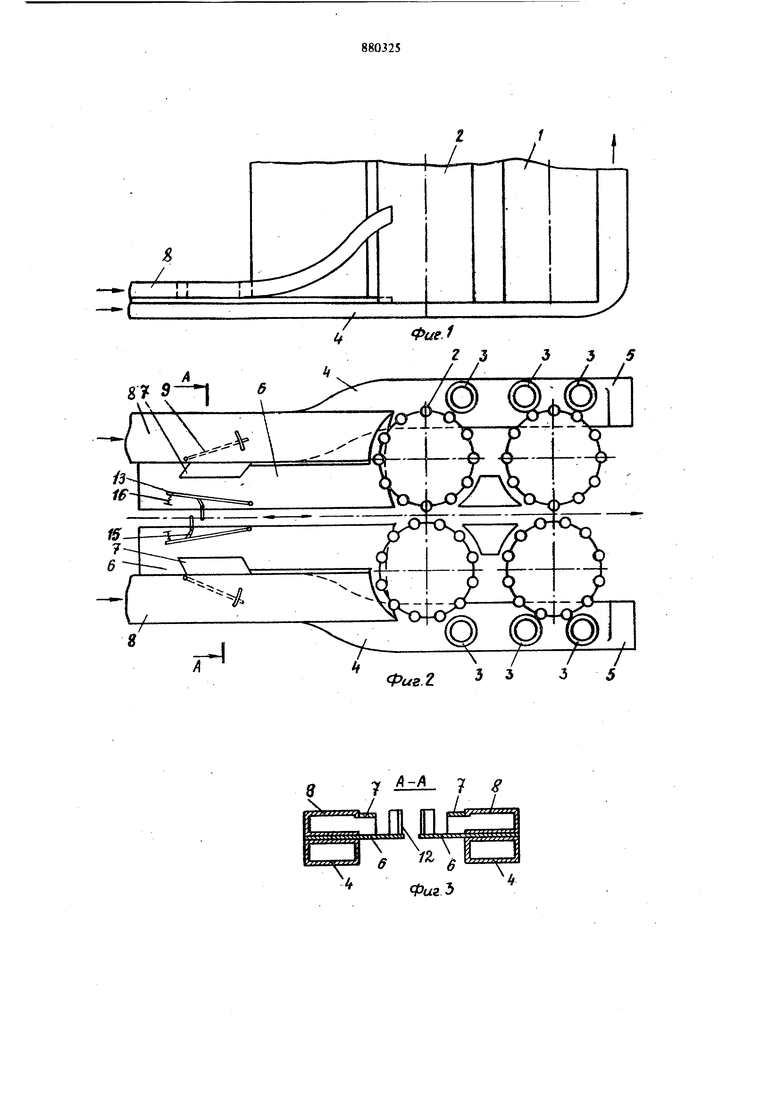
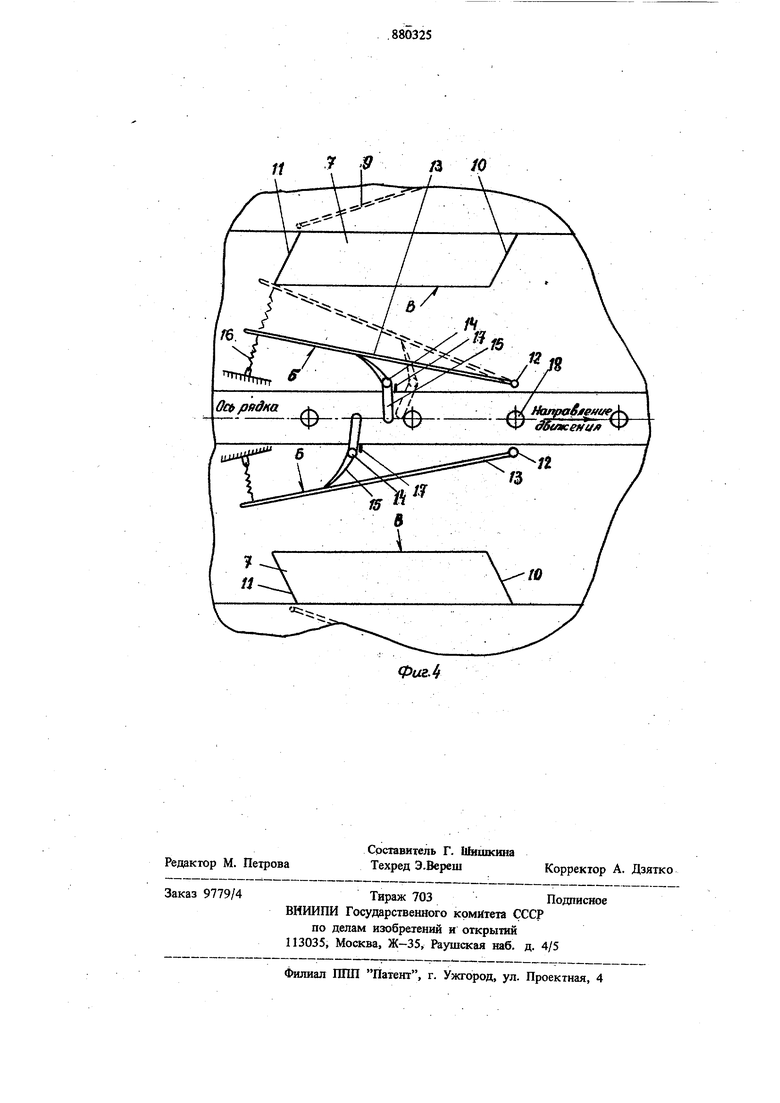
На фиг. 1 схематически представлен хлопкоуборочный аппарат, вид сбоку; на фиг. 2 то же, вид сверху; на фиг. 3 - разрез А-А ка фиг. 2; на фиг. 4 - механизм привода возвратно-вращательного перемещения лопастей
Хлопкоуборочный аппарат содержит последовательно смонтированные по направлению перемещения аппарата симметрично относительно его продольной оси с образованием рабочей щели шпиндельные барабаны 1 и 2, размещенные в транспортных коридорах, съемники 3, нагнетательную пневмотранспортную систему 4, переходящ)ао в приемные камеры 5, улавливатели 6, вьшолненные в виде горизонтальных щитков и установленные над улавливателями сопла 7 пневмоподборщиков, размещенные в боковой стенке нагнетательных пневмопатрубков 8. Внутри пневмопатрубков 8 у сопел 7 установлены на осях регулировочные стенки 9. Сопла 7 состоят из передних 10, задних Ни верхних стенок, а нижние стенки совпадают с плоскостью улавливателей.
Перед входными окнами сопел 7 пневмопатрубков на осях 12 шарнирно закреплены вертикальные лопасти 13. Лопасти 13 снабжены механизмом возвратно-вращательного движения, который представляет собой смонтированный на щитке 6 посредством вертикальной оси 14 угловой рычаг 15, одно плечо которого установлено с перекрытием продольной оси аппарата, а другое - с возможностью контактирования с лопастью. Лопасть прижимается к рычагу упругим элементом 16. Щиток 6 снабжен ограничителем 17 поворота углового рычага.
При работе хлопкоуборочного аппарата основная масса хлопка собирается передними 1 и задними 2 щпиндельными барабанами и с помощью съемников 3 переносится в приемные камеры 5, а оттуда в накопитель машинь
Обработанные кусты хлопчатника после выхода из рабочей зоны задних барабанов распрямляются и сбрасывают слабо закрепленные дольки хлопка на поверхность улавливателей 6. Находящаяся на улавливателях хлопковая масса перемещается нижними ветками кустов в зону размещения сопел 7 пневмоподборщиков.
При передвижении аппарата по полю одни концы угловых рычагов 15 периодически взаимодействуют со стеблями 18 кустов, при этом другие их концы отодвигают лопасти 13
к входным окнам сопел 7 пневмоподборщиков. После окончания взаимодействия стебля с рычагом лопасти 13 за счет упругих элементов 16 возвращаются в исходное положение.
Размещенные перед соплами лопасти соверщают возвратно-вращательные движения и подают при этом хлопковые дольки к входному окну сопла, загружая его. Такая подача хлопкового вороха позволяет равномерно загружать
пневмоподборщик, ликвидирует сгруживание хлопка перед соплом и его забои, что в конечном счете повышает эффективность сбора всего хлопкоуборочного аппарата.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2751325/30-12, кл. А 01 D 46/14, 1979.
в
ттуя
,„1,„Л
6 в
7 7 g
ГН |П pia&zzzt
V
ФигЪ
7 19
/3 70
Фиг4
