Изобретение относится к весоизмерительной технике.
Известно весоизмерительное устройство, содержащее грузоприемную площадку с преобразователем вес-аналог, элемент сравнения, цифроаналоговый преобразователь, блок памяти и приборы индикации и регистрации Ij,
Недостатком известного устройства является невозможность определения им места наработки продукции, что ведет к понижению быстродействия и надежности устройства.
Наиболее близким по технической сущности к предлагаемому является весоизмерительное устройство для грузов, подвешенных в захватах конвейера, содержащее конвейер с захватами, связанными с датчиком наличия груза и датчиком прохождения захватов , грузоприемную площадку с преобразователем вес-аналог, подключенным ко входу элемента сравнения, выход которого соединен через аналого-цифровой преобразователь с приборами индикации и регистрации, блок памяти, соединенный с цифроаналоговым преобразователем, реверсив.ный счетчикL23.
Недостаток этого устройства заключается в отсутствии возможности осуществлять компенсацию тары в случае, когда с рабочего места переданы грузы (бобины или кассеты со сте|(ловрлокном до момента взвешивания первого груза с данного рабочего места, а также в случае циклического движения грузов на конвейере, т.е. ког10да необходимо осуществлять взвешивание груза после одного или нескольких оборотов конвейера с лунным гру- зом. Кроме того, известное устройство сложно,, что обусловлено большой
15 разрядностью реверсивного счетчика и наличием в устройстве коммутатора . Все это снижает надежность и быстродействие известного устройства.
Цель изобретения - повышение на20дежности и быстродействия.
Поставленная цель достигается тем, что введены дешифратор, кольцевой счетчик, элементы НЕ и ЗАПРЕТ, причем выход датчика наличия груза сое25динен со входом реверсивного счетчика, выход которого соединен со входом дешифратора, второй вход которого подключен через кольцевой счетчик к выходу датчика прохождения зах30ватов, а выход соединен со входом блока памяти и элемента ЗАПРЕТ, выход которого соединен со вторым ёходом реверсивного счетчика, а второй вход - через элемент НЕ с выходом преобразователя вес-аналог, причем вычитающий пход элемента сравнения соединен с выходом цифроаналогового преобразователя.
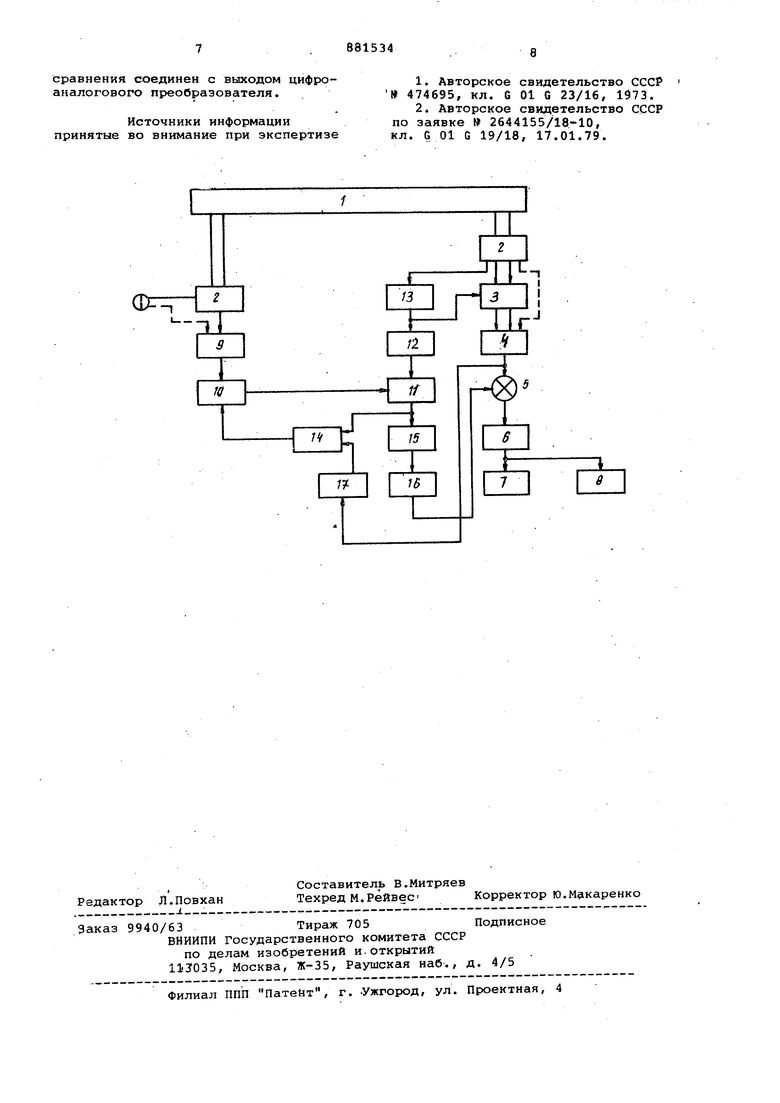
На чертеже приведена структурная схема устройства.
Устройство содержит конвейер 1 с жестко закрепленными на нем захватами 2, на которые оператор вешает бобины или кассеты, содержащие несколько бобин с намотанным на них стекловолокном. На участке взвешивания указанные грузы с помощью манипулятора 3, а при его отсутствии вручную, переставляются на приемную платформу весов (не показана, взаимочействуя тем самым с преобразователем вес-аналог 4, соединенным через элемент сравнения 5 с аналогоцифровым преобразователем б, подключенным к приборам индикации и регистрации 7 или ко входу управляющей, вычислительной машины(УВМ)в. Датчик 9 наличия груза на захвате конвейера соединен через реверсивный счетчик 10 с дешифратором 11, подключенным через кольцевой счетчик 12 к датчику прохождения захватов конвейера 13. Дешифратор 11 подключен к элементу ЗАПРЕТ 14, а через блок памяти 15, цифро-аналоговый преобразователь 16 к элементу сравнения 5, другой вход которого соединен с элементом НЕ 17.
Устройство работает следующим образом.
Оператор после.наработки стекловолокна на бобину из стеклоплавильного сосуда вешает данную бобину на проходящий мимо его рабочего места захват 2 конвейера 1 или размещает указагнную бобину предварительно на кассете и после набора определенного числа бобин на кассете вешает последнюю на захват 2 конвейера 1. При этом датчик 9 наличия груза на захвате конвейера срабатывает либо автоматически (например, под действием веса грузаJ, либо полуавтоматически (например, путем нажа1Тия кнопки оператором одновременно с размещением груза на захвате 2 конвейера i). Сигнал с датчика 9 поступает на суммирующий вход реверсивного счетчика 10 в начальный момент обнуленного. Захваты конвейера 2,. проходя мимо датчика прохождения захватов конвейера 13 расположенного непосредственно на участке взвешивания грузов со стекловолокном, фиксируются указанным датчиком 13, работгиощим, например, по магнитоиндукционному принципу. Сигналы с датчика la -в импульсной форме (каждый импульс соответствует прохождению мимо датчика одного захвата) по
ступают в кольцевой счетчик 12. Колцевой счетчик 12 рассчитан на суммарное количество захватов на кон.вейере 1 и работает по кольцеврму принципу,т.е. после накопления суммы импульсов, соответствующей суммарному числу захватов конвейера, обнуляется и счет импульсов повторяется сначала, т.е. с нулевого значения. Сигналы с кольцевого счетчика 12 поступают на вход дешифратора 11, на второй (управляющий) вход которого поступапт сигналы с реверсивного счетчика 10. Дешифратор 11 предназначен для выделения сигнала (например, в, двоично-десятичной форме), соответствующего номеру рабочего места, с которого в данный момент поступает груз (бобина или кассета) со стекловолокном. Учитывая, что на первый вход дешифратора 11 поступает периодическая последовательность равнозначных импульсов (.равновзвешенных импульсов; , т.е. унитарный код, от датчика прохождения захватов 13, а на выходе дешифратора 11 образуется последовательность импульсов в двоично-десятичном коде, получаем дешифратор 11, выполненный функционально в виде управляемого преобразователя кода в код СБ данном случае унитарного кода в двоично-десятичный). Физически дешифратор 11 может быть выполнен как на магнитных элементах (например, трансфлюксорах),- так и на логических элементах (например, элементах совпадения и). Например, пусть рабочее место, с которого поступает груз на взвешивающее устройство, определяется числом захватов 2 конвейера 1 от данного места до участка взвешивания и составляет 137 или в двоичном коде 10001001. В момент счета указанного числа импульсов кольцевым счетчиком 12, построенным, например, на последовательно соединенных триггерах, единичные сигналы снимаются с первого, четвертого, и восьмого триггеров. Вводя данные сигналы на элементы И, которых в данном случае достаточно трех штук, и при одновремённом наличии сигнала на них от реверсивного счетчика 10 (после пердачи груза на конвейер 1 и срабатывания датчика 9), осуществляем тем самым распознавание номера рабочего места, с которого пришел в данный момент груз.- Аналогично может быть реализована функция опознавания и других рабочих мест, с которых осуществляется передача грузов на конвеПер.
Сигнал с дешифратора 11, воздействуя на блок памяти 15 (например, в двоично-десятичном коде;, осуществляет считывание с блока памяти 15 кода числа, соответствующего весу тары ( пустой бйбины или кассеты с пустыми бобинами на рассматриваемом рабочем месте. Данный код числа преобразуется в цифроаналоговом преобразователе 16 в эквивалентное напряжение, которое поступает на вычитающий вход элемента сравнения 5. На суммирующий вход элемента сравнения 5 поступает сигнал с преобразователя вес-аналог 4, соответствующий полному весу груза со стекловолокном, устанавливаемого на платформе весов (не показана; манипулятором 3 или вручную оператором-контролером участка взвешивания, который снимает груз в момент его прохождения мимо участка взвешивания, т.е. мимо датчика 13.
Элемент сравнения 5 осуществляет вычитание веса тары из полного веса груза со стекловолокном и после преобразования, сигнала с выхода элемента сравнения . 5 в аналого-цифровом преобразователе 6 чистый вес стекловолокна в цифровой форме регистрируется индикатором 7, также поступает на вход УВМ 8 для определения наработки стекловолокна по данному рабочему месту за определенное время (смена, сутки и т.д.) .
После срабатывания дешифратора 11 (т.е. опознания данного рабочего места), сигнал с выхода дешифратора 11 поступает (в виде единичного импульса) через разрешающи вход элемента ЗАПРЕТ 14 на вычитающий вход реверсивного счетчика 10, В частном случае, когда по ряду причин невозможна наработка грузов со стекловолокном свыше одного за время его дви жения от рабочего места до участка взвешивания, в качестве реверсивного счетчика 10 может быть взят обычный триггер, т.е. реверсивный счетчик с суммой счета до двух. В общем же случае, когда за время движения груз от рабочего места до участка взвешивания на данном рабочем месте может быть подвешено дополнительно произвольное число грузов, реверсивный счетчик 10 должен содержать соответ-ствующее число разрядов (триггеров). В момент прохождения участка взвешивания каждого из указанного числа грузов показания счетчика Ю уменшаются на единицу.
Необходимость элемента ЗАПРЕТ 14 обусловлена возможностью по какойлибо причине пропуска (неснятия) груза на участке взвешивания. Такая ситуация может случиться, например, пр необходимости временного отсутствия оператора-контролера на участке взвешивания Сили его кратковременного отдыха) , а также в случае выхода из строя манипулятора 3, осуществляющего съем грузов автоматически. В этом случае на запрещающий вход элемента 3AIIPJET 14 подается сигнал
с выхода преобразователя вес-аналог 4 через инвертирующий элемент НЕ 17 и вычитание импульса с дешифратора 1 в счетчике 10 не происходит. Фактически запрещающий сигнал на элементе ЗАПРЕТ 14 присутствует, постоянно, кроме моментов времени, когда на площадке весов находится груз (.сигнал с выхода преобразователя 4 отличе от нуля) . В случае пропуска груза мимо участка взвешивания в течение одного или нескольких циклов враще- ния конвейера опознавание данного груза происходит на участке взвешивания каждый раз за счет того, что счетчик 13 построен по кольцевому принципу, т.е. каждый аахват 2 жестко соответствует своему показанию указанного счётчика.
Применение устройства позволяет сократить затраты на оборудование, в частности электронные элементы, по сравнению с известным за счет уменьшения как общего числа счетчиков, так и уменьшения их разрядности, а также увеличить надежность работы оборудования при частичных его отказах и вследствие сокращения общего числа элементов, увеличить быстродействие устройства вследствие увеличения частоты движения грузов с рабочих мест при неизменной скорости конвейера.
Формула изобретения
Весоизмерительное устройство для грузов, подвешенных в захватах конвеера, содержащее конвейер с захватами с датчиком наличия груза и датчиком прохождения захватов, грузоприемную площадку с преобразователем вес-аналог, подключенным ко входу элемента сравнения, выход которого соединен через аналого-цифровой преобразователь с приборами индикации и регисрации, блок памяти, соединенный с цифроаналоговым преобразователем, реверсивный счетчик, отличающийся тем, что, с целью повышения надежности и быстродействия, в него введены дешифратор, кольцевой счетчик, элементы НЕ и ЗАПРЕТ, причем выход датчика наличия груза соединен со входом реверсивного счетчика, выход которого соединен со входом дешифратора, второй вход которого подключен через кольцевой счетчик к выходу датчика прохождения захватов, а выход соединен со входом блока памяти и элемента ЗАПРЕ выход которого соединен со вторым вводом реверсивного счетчика, а второй вход - через элемент НЕ с выходом преобразователя вес-аналог, причем вычитающий вход элемента
сравнения соединен с выходом цифроаналогового преобразователя.
Источники информации принятые во внимание при экспертизе
1.Авторское свидетельство СССР 474695, кл. G 01 G 23/16, 1973.
2.Авторское свидетельство СССР по заявке 2644155/18-10,
кл. G 01 G 19/18, 17.01.79.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство для грузов, подвешенных в захватах конвейера | 1978 |
|
SU723388A1 |
| Весоизмерительное устройство для грузов, подвешенных в захвате конвейера | 1991 |
|
SU1806331A3 |
| Устройство для определения места наработки стекловолокна | 1978 |
|
SU723015A1 |
| Устройство для определения окончания намотки волокна на бобину | 1979 |
|
SU775033A1 |
| Устройство для определения окончания намотки волокна на кассету | 1980 |
|
SU937300A1 |
| Устройство для перемещения,съема и захвата грузов | 1985 |
|
SU1266819A1 |
| Автоматическое весоизмерительное устройство | 1981 |
|
SU974137A1 |
| Конвейерные весы | 1981 |
|
SU974136A1 |
| Устройство для стабилизации средней линейной плотности стеклонити | 1978 |
|
SU791667A1 |
| Устройство для регистрации веса в динамике | 1983 |
|
SU1153239A1 |
