I
Изобретение относится к автоматическому управлению и контролю, может найти применение в устройствах измерения и регулирования различных технологических параметров, где требуется высокая Точность установки и поддержания нулевого положения.
Известны следящие системы и устройства для автоматической отработки сигнала ошибки и поддержания нулевого положения, где исполнительный элемент, в качестве которого применяется шаговый двигатель, используется в двух режимах: шагового перемещения или шагового и непрерывного перемещения в функции от величины ошибки (амплитудного -или фазового) рассогласования.Следящие системы такого типа содержат чувствительный элемент, усилители, систему селектирования, нуль-органы, пороговые, релейные и логические элементы, блок знака скорости, датчики шагов, иитеграторы и т.д. ГОиГ2.
Недостатками известных систем являются недостаточная точность отработки сигнала ошибки и поддержания нулевого положения, ограниченная применением в качестве исполнительных элементов шаговых двигателей электротехнического и электромеханического типов, а также частота / следования управляющих импульсов, ограниченная частотой приемистости
0 шаговых двигателей, которая определяет быстродействие и точность отра. ботки следящей системы при подходе шагового двигателя к точке согла-i сованного положения. Некоторое улучSшение параметров шаговых следящих систем такого типа, например точности, достигается усложнением схемы и приводит к большому числу логических связей и элементов.
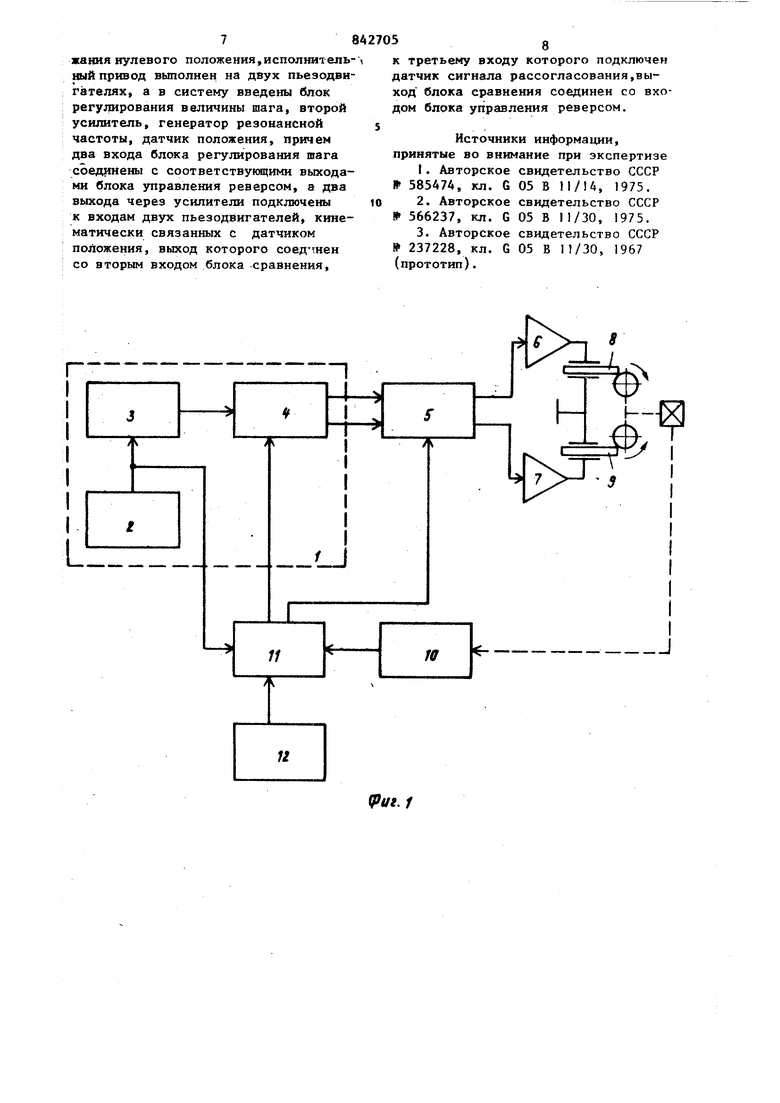
Наиболее близкой к предлагаемой по технической сущности является следящая система, которая содержит датчик сигнала рассогласования. усилитель, генератор импульсов,блок сравнения, блок управления реверсом блок управления скоростью шагового двигателя и шаговый двигатель Гз. К основным не;в(остаткам системы следует отнести ограниченную точнос отработки сигнала ошибки, так как шаговые двигатели (электрического или электромеханического типов) , ис пользуемые в качестве исполнительно го элемента, обладают сравнительно большой ценой шага (ед.градусов); . малое быстродействие, зависящее от частоты отработки шагов, которая ограничивается частотой приемистости и не может быть больше ее; испол зование шаговых двигателей электромеханического и электротехнического типов, снижающих надежность следяще системы в целом Цель изобретения - повьшение точ ности отработки сигнала ошибки и быстродействия. Эта цель достигается тем, что ис полнительный привод выполнен на двух пьезодвигателях, а в систему введены блок регулирования величига шага, второй усилитель, генератор резонансной частоты, датчик положе-ния, причем два входа блока регулирования шага соединены с соотв тствукицими выходами блока управления реверсом, а два выхода через усилители подключены к входам двух пьезодвигателей, кинематически связанных с датчиком положения, выход которогосоединен со вторым входом блока сравнения, к третьему входу которого подключен датчик сигнала рассогласования, выход блока сравнения соединен со входом блока упра ления реверсом. Такое электрическое соединение элементов следящей системы позволяет сигнал с датчика углового положения ротора пьезодвигателя преобразовывать электрической схемой в радиоимпульс управления, длительнос которого пропорциональна величине сигнала рассогласования, и испольэовать в этом случае свойство работы пьезодвигателя от непрерывного вращения до шагового перемещения. В этом случае изменение величины ш га производится не за счет изменения частоты питающего генератора импульсов, аза счет изменения длительности )гправляемого импульса 54 блока сравнения, величина длительности .которого изменяется пропорционально величине амплитуды входного сигнала рассогласования и равна дпительности шага. Величина этого шага может изменяться в значительных пределах (от сотен угловых градусов до тысячных долей угловой секунды . На фиг.1 дана блок-схема следящей системы; на фиг.2 - временные диаграммы, поясняющие работу следящей системы. Система содержит блок I управления, состоящий из генератора 2 импульсов, генератора 3 резонансной частоты и блока 4 управления реверсом. В следящую систему входит также блок 5 регулирования величины шага, усилители 6 и 7 мощности, нагрузкой которых являются пьезоэлектрические пластины пьезодвигателей 8 и 9, датчик 10 положения, блок II сравнения и датчик; 12 сигнала рассогласования. Схема работает следующим образом. При поступлении сигнала рассогласования Ч- в логический блок II сравнения, навыходе последнего появляются сигналы fo и .Я) . Сигнал if , представляющий собой преобразованный сигнал,длительность которого 1Г пропорцнональна амплитуде У ,т.е. &-( Ч-j) поступает в блок 5 регулирования величины шага, а f - сигнал, полярность которого соответствует отклонению сигнала рассогласования, поступает в блок 4 управления реверсом. В зависимости от полярности сигнала 1/ блок управления реверсом подключает к блоку 5 один из электрических каналов Х или в результате чего сигнал резонансной частоты 1/2 по одному из них проходит на вход блока 5 регулирования величины шага. В схеме 5 сигнал 2. модулируется напряжением f по дпительности в радиоимпульс ifj и поступает на один из входов усилителей 6 или 7 мощности. Усиленный сигнал радиоимпульса V подается соответственно на один из пьезодвигателей 8 или 9. Происходит отработка сигнала ошибки, количественная величина которого контролируется датчиком 10 положения и в виде выходного сигнала fg поступает :на второй вход блока I I сравнения. По мере отработки сигнала ошибки длительность сигнала У уменьшается до нуля (фиг. , где С l, ... Dn. Предлагаемая следящая система является одной из составных частей .разрабатываемого автоматического комплекса, где ее используют в ка-, честве прецизионной системы отработки и поддержания нулевого положения Свойства пьезодвигателя работать в диапазоне непрерывных и дискретйьк перемещений (с ценой шага до 0,01 у гл. с.) позволяет создать следящую систему измерения и регулировки различных технологических параметров с высокой точностью установки и поддержания нулевого положения. Увеличение точности быстродействия отработки сигнала ) получается вследствие изменения в широких пределах длительностиt управляющего импульса У логического блока сравнения величина длительности которого изменяется пропорционально величине амплитуды входного сигнала и равиа длительности шага пьезодвигателя. Высокая точность отработки следящей системы практически достигается прежде всего тем, чтб импульсы, выра батываемые генератором тактовых импульсов, синхронизируют работу блока сравнения генератора резонансной час тоты. Что позволяет получать на выхо де блока 5 регулирования величины шага радиоимпульсы, у которых несущая частота и частота огибающей в начальный момент времени равны между собой. Длительность этого радиоимпул са ff равна длительности импульса управления , величина которого плавно меняется в диапазоне от 1 до fp (фиг.2) пропорционально изменению величины сигнала рассогласования. Диапазон изменения длительности им пульса управления / может лежать от десятков наносекунд до -секунд и определяется частотой следования тактовых импульсов и величиной сигнала рассогласования. Минимальная длительность импульса управления отрабатываемая системой, определяется параметрами исполнительиого элемента, в качестве которого использован пьезодвигатель. Пьезоэлектрический двигатель, позволяющий осуществлять плавный переход от режима непрерывного вращения до шагового, используемый в качестве 5 исполнительного элемента при работе в шаговом режиме, способен отрабатывать шаги длительностью, равной ДЛ1Гтельности импульсов управления. Мннимальная длительность шага, отрабатьгааемая пьезодвигателем, зависит от параметров пьезоэлектрической пластины и может составлять единицы-десятки микросекуид. При отработке сигнала ошибки пьезодвигатель практически не вносит погрешностей, свойственных электрическим шаговым даигателям, и не вли яет на точность отработки следящих (Систем. Это вытекает прежде всего из самой физической Сущности работы пьезодвигателя. На ротор пьезодвигателя пьезопластина (пьезорезонатор) давит с усилием до 20Н, практически исклочает влияние различных механических факторов (момент инерции, проскальзывание, трение на точность отработки. Минимальная величина шага, полученная, на эксперимемтальнсм образце, составляет 0,008 угл.с. Кроме того, пьезодвигатель является быстродействующим исполнительным элементом. Быстродействие его определяется сего размерами пьезопластины, образец с пьезопластиной размерами 60x14x3,5 мм и стальным ротором 18 мм, с нагрузкой на валу 400 г«см проворачивается на З за время 0,5 мс. ; Применение пьеэодвигателя в качестве исполнительного элемента позволяет существенно повысить надежиость следящей системы в целом, прещде всего за счет простоты, надежности конструкции самого пьеэодвигатеяя и упрощения электрической схемы, содержащей сравиительно малое число элементов с простыми логическими связями. Формула изобретения Следящая система, содержащая датчик сигнала рассогласования,первьй усилитель, последовательно соединенные генератор импульсов и блок сравнения, а также последовательно соединенные блок управления реверсом и сполнительный привод, отличащаяся тем, что, с целью повыг ения точности и быстродействия при бработке сигнала ошибки или поддержания нулевого положения исполнитель ный привод выполнен на двух пьезодви гателях, а в систему введены блок регулирования величины шага, второй усшштель, генератор резонансной частоты, датчик положения, причем два входа блока регулирования шага :соединены с соответствующими выходами блока управления реверсом, а два выхода через усилители подключены к входам двух пьезодб игателей, кинематически связанных с датчиком положения, выход которого соединен со вторым входом блока сравнения. 58 к третьему входу которого подключен датчик сигнала рассогласования,выход блока сравнення соединен со входом блока управления реверсом. Источники информации, принятые во внимание при экспертизе 1. Авторское свндетельство СССР t 585474, кл. G 05 В 11/14, 1975. 2. Авторское свндетельство СССР 566237, кл. G 05 В 11/30, 1975. 3. Авторское свидетельство СССР В- 237228, кл. G 05 В 11/30, 1967 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1081622A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Следящая система | 1982 |
|
SU1035563A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Электрогидравлический следящий привод | 1976 |
|
SU641397A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 1991 |
|
RU2025882C1 |
| Следящая система | 1989 |
|
SU1732329A1 |

.I
иг,1
