Изобретение относится к области автоматики, вычислительной техники и радиоэлектроники. Известны следующие устройства: "следящий привод" [а.с. 2015519 Следящий электропривод / Паромщик И.Е.], "привод перемещения", "следящий электропривод", "двухкоординатный следящий привод" [Пьезоэлектронника. /А.А.Ерофеев, А.Н.Проклин, В.Н.Уланов и др. - М.: Радио и связь, 1994, - 240 с.: ил]. Известный привод перемещения [а.с. 2015519 Следящий электропривод / Паромщик И.Е.] содержит последовательно включенный измеритель рассогласования, предварительный усилитель, первый выпрямитель, первый сумматор, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока, редуктор, выход которого соединен с первым входом измерителя рассогласования, второй вход которого является исходом электропривода и соединен через первый дифференциатор с первым входом первого блока умножителя, второй вход которого соединен с выходом реле реверса и входом фазового управления бесконтактного двигателя постоянного тока, а выход - вторым входом первого сумматора, третий вход которого соединен с выходом второго выпрямителя, выход предварительного усилителя соединен с первым входом второго сумматора, второй вход которого соединен через первый усилитель с выходом второго блока умножения, а выход - с информационным входом первого интегратора, выход которого соединен с первым входом второго блока умножения, с входами первого блока сигнатуры и второго усилителя, выход которого соединен с первым входом третьего сумматора, второй вход которого соединен с первым входом второго сумматора, а выход - с входом второго блока сигнатуры, выход которого соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом первого блока сигнатуры, а выход - с входом первого релейного элемента, выход которого соединен со вторым входом второго блока умножения.
Основным недостатком прототипа является то, что он содержит большое количество управляющих и регулирующих элементов. Использование вышеперечисленных элементов уменьшает устойчивость системы, затрудняет регулирование и управление в целом. Также это приводит к высоким энергетическим затратам и чаще всего не дает желаемого результата и точного позиционирования.
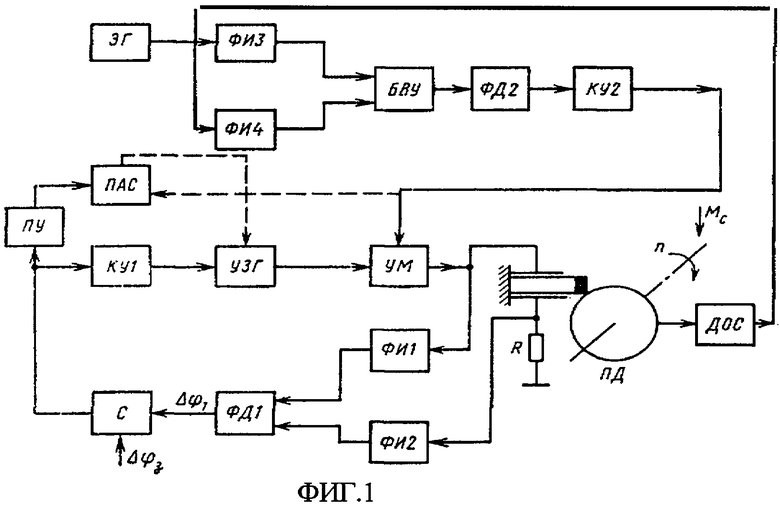
Известный привод перемещения [Пьезоэлектронника. /А.А.Ерофеев, А.H.Проклин, В.Н.Уланов и др. - М.: Радио и связь, 1994, - 240с.: ил] содержит задающий генератор (ЗГ), управляющий задающий генератор (УЗГ), четыре формирователя импульсов (Ф1-Ф4), блок вычитания частот (БВЧ), два фазовых детектора (ФД1-ФД2), два корректирующих устройства (КУ1-КУ2), сумматор (С), пороговое устройство (ПУ), переключатель аналоговых сигналов (ПАС), усилитель мощности (УМ) датчик обратной связи (ДОС) и пьезоэлемент, фиг 1.
Данное техническое решение по своей технической сущности и достигаемому эффекту является наиболее близким к заявляемому предложению и поэтому взято нами в качестве прототипа. Основным недостатком прототипа является то, что он содержит большое количество управляющих и регулирующих элементов. Использование вышеперечисленных элементов уменьшает устойчивость системы, затрудняет регулирование и управление в целом. Также это приводит к высоким энергетическим затратам и чаще всего не дает желаемого результата и точного позиционирования.
Заявляемое техническое решение свободно от недостатков присущих данному прототипу. Поэтому мы предлагаем устройство, которое содержит меньшее количество элементов, кроме того, в него введена дополнительная цепь обратной связи, что способствует увеличению устойчивости системы и увеличивает помехозащищенность двигателя перемещения. Патентный поиск и сравнение заявляемого технического решения, позволяющего повысить помехозащищенность, с существующими решениями показал, что в известных технических решениях не имеются признаки, схожие с признаками, отличающими заявляемое устройство от прототипа. Цель изобретения - увеличение помехозащищенности двигателя перемещения путем компенсации помех пьезоэлектрического двигателя в структуре пьзоэлемента, одна из обкладок которого разделена на две части.
Устройство, фиг.2, состоит из основного усилителя мощности 1, к выходу которого подключена разделенная обкладка 2 пьезоэлемента 4, с датчиком обратной связи 5. Для уменьшения помех, возникающих в цепи основного усилителя мощности 1 и пьезоэлемента 4, введена дополнительная цепь управления. Цепь состоит из двухвходовой схемы сравнения 7, к одному из входов которой через фазовращатель 8 подключен вход основного усилителя мощности 1, а к другому - датчик обратной связи 5, вход которого подключен к неразделенной обкладке пьезоэлемента 4. Выход схемы сравнения 7 через корректирующее устройство 9 и дополнительный усилитель 6 соединен с разделенной обкладкой 3 двигателя перемещения 4. Помехи, вызывающие смещения на обкладке 2, корректируются смещением в структуре пьезоэлектрика на разделенной обкладке 3 пьезоэлемента двигателя перемещения 4.
На вход датчика обратной связи 5 поступают механические колебания с обкладки пьзоэлемента в зависимости от синусоидального напряжения, поступающего на разделенные обкладки 2 и 3. Датчик преобразует механические колебания в электрический сигнал.
Фазовращатель 8 служит для задержки части входного сигнала с напряжением U2, поступающего на второй вход схемы сравнения 7, на время, необходимое для прохождения другой части входного сигнала по цепи: основной усилитель мощности 1, пьезоэлемент 4, датчик обратной связи 5 до поступления его с напряжением U1 на первый вход схемы сравнения 7.
Датчик 5 служит для преобразования колебаний пьезоэлектрического двигателя в напряжение.
Корректирующее устройство 9 с коэффициентом передачи α служит для выравнивания в рабочем диапазоне частот суммарной АЧХ цепи из усилителя 6 и пьезоэлектрического двигателя, а также для компенсации сдвига фаз в этой цепи между напряжением сигнала на выходе схемы сравнения 7 и напряжением на выходе усилителя мощности 6.
Устройство работает следующим образом.
Напряжение, подаваемое на пьезоэлемент пьезоэлектрического двигателя, вызывает деформации и смещение пьезоэлектрической структуры, которая состоит из двух слагаемых,

где ξС - деформация пьезоэлектрика, соответствующая неискаженному сигналу на обкладке пьезоэлектрического двигателя, т.е. сигналу на входе основного усилителя мощности 1;
ξN - деформация пьезоэлектрика, соответствующая искомому сигналу, возникающему в усилителе 1 и пьезоэлелемете пьезоэлектрического двигателя 4.
Напряжение сигнала U1 на выходе датчика обратной связи 5 также представляет сумму

где UC и NN - напряжения, пропорциональные соответственно деформациям и смещениям неискаженного и искаженного сигналов.
По своему определению напряжение UC пропорционально UВХ

где k1 - коэффициент пропорциональности.
Тогда из выражений (2) и (3) получаем

Напряжение U1 содержит в себе информацию об искажениях и поступает на один из входов схемы сравнения. Эти искажения возникают, в основном, в усилителе мощности 1 и пьезоэлементе пьезоэлектрического двигателя 4, так как путем коррекции характеристики передачи датчика обратной связи 5 его искажающее действие на сигнал несущественно. На другой вход схемы сравнения 7 поступает сигнал с входа усилителя 1 напряжением U2, задержанный на время прохождения входного сигнала по цепи: усилитель мощности 1, пьезоэлемент пьезоэлектрического двигателя 4, датчик обратной связи 5.
Напряжение U2 связано простым соотношением с входным напряжением

где k2 - постоянный коэффициент.
В схеме сравнения происходит масштабирование напряжения U2 с множителем γ=k1/k2 инвертированное напряжение U1 и сложение этих двух преобразованных напряжений, т.е. производится их вычитание. Таким образом, напряжение на выходе схемы сравнения U3 имеет вид

Из полученного выражения видно, что U3 представляет собой напряжение сигнала искажений, но с противоположной фазой. Далее этот сигнал проходит через корректирующее устройство 9, усилитель мощности 6 и поступает на разделенную обкладку 3 пьезоэлемента пьезоэлектрического двигателя 4.
Таким образом, непосредственно в структуре пьезоэлемента пьезоэлектрического двигателя перемещения происходит подавление искажений и стабилизация частоты возбуждения пьезоэлемента.
Источники информации
1. Авт. 2015519. Следящий электропривод / Паромщик И.Е.
2. Пьезоэлектронника. /А.А.Ерофеев, А.Н.Проклин, В.Н.Уланов и др. - М.: Радио и связь, 1994, - 240 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВАЯ СТИРАЛЬНАЯ МАШИНА С КОМПЕНСАЦИЕЙ ПОМЕХ В СТРУКТУРЕ ПЬЕЗОЭЛЕМЕНТА ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2379396C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИГНАЛА И ДАТЧИК СИГНАЛА ТРЕВОГИ НА ОСНОВЕ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ СИГНАЛА | 1999 |
|
RU2168213C1 |
| СПОСОБ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОКОНТРОЛЯ | 2008 |
|
RU2393487C1 |
| Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании | 2019 |
|
RU2705926C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
Изобретение относится к области электротехники, а также автоматики, вычислительной техники и радиоэлектроники. Технический результат от использования данного изобретения - увеличение помехозащищенности данного двигателя путем компенсации помех предлагаемого пьезоэлектрического двигателя в структуре пьезоэлемента благодаря обеспечению подавления искажений и стабилизации частоты возбуждения пьезоэлемента. Сущность изобретения состоит в следующем. Пьезоэлектрический двигатель перемещения с цепью управления для компенсации помех в пьезоэлементе, содержащий основной усилитель мощности, подключенный к обкладке пьезоэлемента, датчик обратной связи, корректирующее устройство. При этом согласно изобретению одна из обкладок пьезоэлемента разделена на две части, причем на первую часть обкладки сигнал поступает с выхода основного усилителя мощности, а на вторую часть обкладки поступает сигнал, компенсирующий помехи в структуре пьезоэлемента, формирующийся в схеме сравнения, первый вход которой подключен к выходу датчика обратной связи, вход которого подключен к неразделенной обкладке пьезоэлемента. Исходный сигнал через фазовращатель поступает на второй вход схемы сравнения, а с выхода схемы сравнения сигнал, компенсирующий помехи в структуре пьезоэлемента, поступает через корректирующее устройство на вход дополнительного усилителя мощности, выход которого подключен к второй части разделенной обкладки пьезоэлемента. 2 ил.
Пьезоэлектрический двигатель перемещения с цепью управления для компенсации помех в пьезоэлементе, содержащий основной усилитель мощности, подключенный к обкладке пьезоэлемента, датчик обратной связи, корректирующее устройство, отличающийся тем, что одна из обкладок пьезоэлемента разделена на две части, причем на первую часть обкладки сигнал поступает с выхода основного усилителя мощности, а на вторую часть обкладки поступает сигнал, компенсирующий помехи в структуре пьезоэлемента, формирующийся в схеме сравнения, первый вход которой подключен к выходу датчика обратной связи, вход которого подключен к неразделенной обкладке пьезоэлемента, при этом исходный сигнал через фазовращатель поступает на второй вход схемы сравнения, а с выхода схемы сравнения сигнал, компенсирующий помехи в структуре пьезоэлемента, поступает через корректирующее устройство на вход дополнительного усилителя мощности, выход которого подключен ко второй части разделенной обкладки пьезоэлемента.
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| RU 2002103431 А, 27.08.2003 | |||
| БЛОК ПИТАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 1993 |
|
RU2039409C1 |
| US 3596206 А, 27.07.1971 | |||
| DE 4122984 A1, 16.01.1992. | |||

