следовательно соединенными блоками выделения программного замедления и программной скорости со вторым блоком сравнения, выход которого подключен к генератору сигналов автоматической локомотивной сигнализации, а второй выход блока программного торможения соединен с третьими входами блоков выделения программного замедления и программной скорости, а четвертый вход блока выделения программной скорости подключен к выходу второго блока сравнения скоростей.
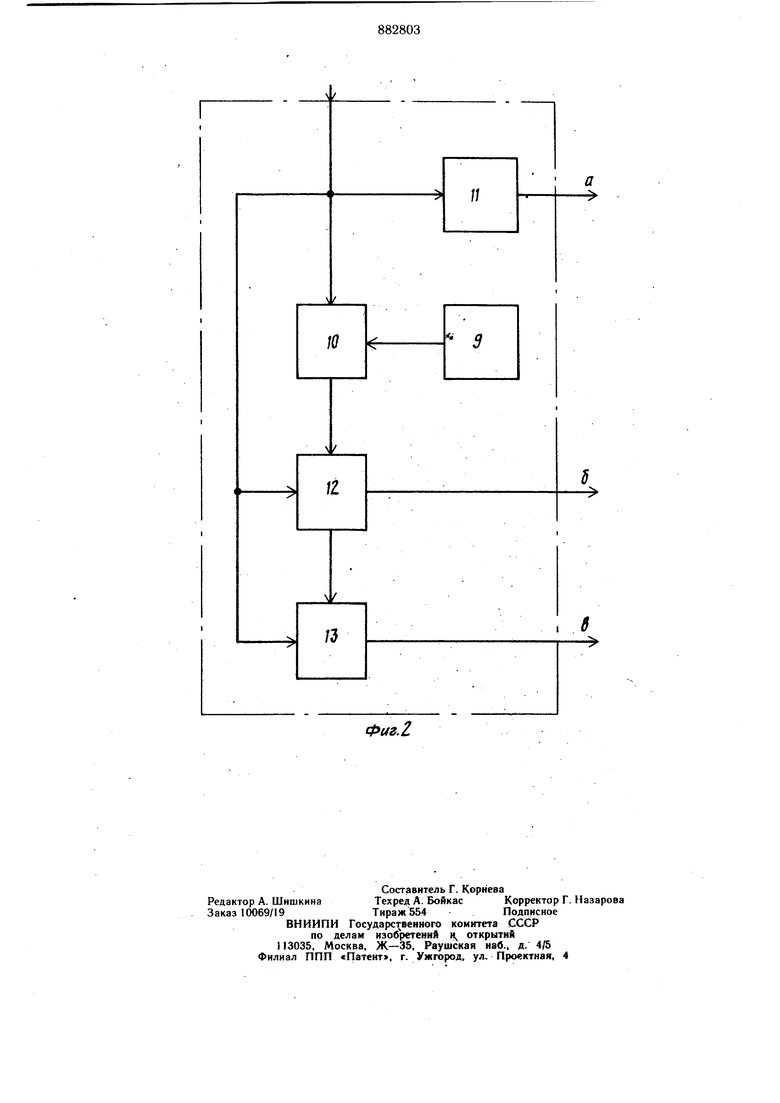
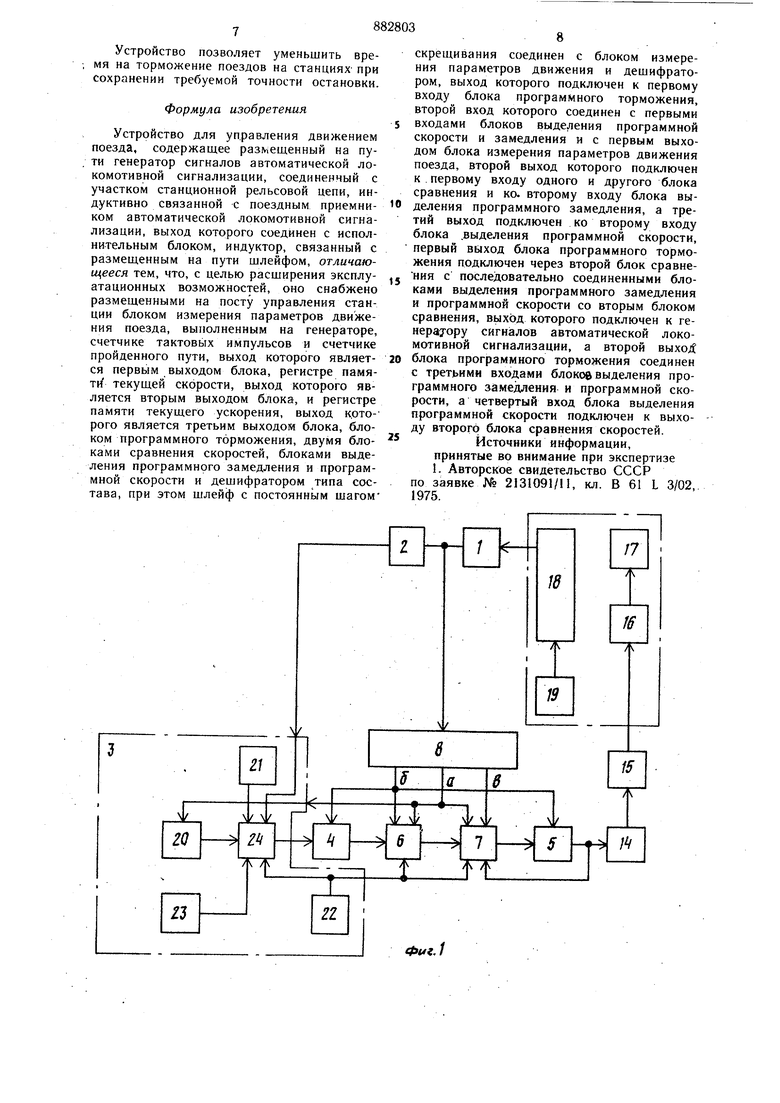
На фиг. I показана блок-схема устройства для управления движением поезда; на фиг. 2 - функциональная схема блока программного торможения.
Устройство (фиг. 1) содержит расположенные на станции шлейф I с постоянным шагом скрещивания, дешифратор 2 типа состава, блок 3 программного торможения, блоки 4 и 5 сравнения скоростей, блок 6 выделения программного замедления, блок 7 выделения программной скорости, блок 8 измерения параметров движения поезда, снабженный генератором 9, счетчиком 10 тактовых импульсов, счетчиком II пройденного пути и регистрами 12 и 13 памяти текуш,е скорости и ускорения, генератор 14 автоматической локомотивной сигнализации (АЛС), станционную рельсовую цепь 15, установленные на поезде поездной приемник 16 АЛС, исполнительный блок 17, интуктор 18, коммутатор 19.
Блок 3 (фиг. 2) включает в себя блок
20программы начала торможения, датчик
21состояния рельсов, датчик 22 длины состава, блок 23 задания графика движения и корректирующий блок 24.
Устройство работает следующим образом.
При движении поезда над шлейфом 1 с постоянным шагом скрещивания, приложенным на участке торможения, поездной индуктор 18, запитываемый частотой tj, наводит в нем ЭДС с той же частотой.
Сигналы от шлейфа 1. поступают в дешифратор 2 типа состава и блок 8 измерения параметров движения на входы счетчика 11 пройденного пути, счетчика 10 тактовых импульсов и регистров 12 и 13 памяти текущей скорости и ускорения.
С трех выходов блока 8 измерения параметров снимаются соответственно сигналы пройденного пути, фактической скорости ti и фактического замедления В. В блоке 3 программного торможения заложены траектории,начала торможения (S для различных типов подвижного состава. Задание признака типа подвижного состава производится на поезде с помощью коммутатора 19, который настраивает индуктор 18 на определенную частоту t;. Выделение признака типа состава осуществляется дешифратором 2, выходы которого соединены с первым входом блока 3 программного торможения.
При движении поезда с первого выхода блока 3 программного торможения на второй вход блока 4 сравнения скоростей поступает информация, о скорости начала торможения Уц.,; (S), при этом на первый вход блока 4 сравнения поступает сигнал фактической скорости со второго выхода блока 8 определения параметров движения поезда. После того, как фактическая скорость поезда станет больше или равной программной скорости начала торможения блок 4 сравнения выдает управляющий сигнал на третий вход блока 6 выделения программного замедления. Блок 6 программного замедления рассчитывает программное замедление по формуле
(So-S),
где V - значение фактической скорости поезда, снимаемое со второго выхода блока определения параметров дви жения;
S - значение пройденного пути в зоне 0торможения, снимаемое с первого
выхода, блока 8 определения параметров движения; So -длина зоны торможения (шлейфа 1).
С выхода блока 6 выделения програм много замедления величина - поступает на четвертый вход блока 7 выделения программной скорости, который вычисляет значение скорости по формуле
Vnp (bo-5)
j Причем, значение пройденного поездом пути передается с первого выхЬда блока 8 определения параметров движения на первый вход блока 7 выделения программной скорости.
С выхода блока 7 выделения програмi мной скорости величина программной скорости Vfip подается на второй вход второго блока 5 сравнения скоростей, а на первый его вход подается значение фактической скорости со второго выхода блока 8 измерения параметров движения поезда. В исходном состоянии (при отсутствии поезда на. участке торможения) с выхода блока 5 сравнения снимается сигнал О, который подает на поезд команду на включение служебного торможения через генератор 14 сигналов автоматической локомотивной сигнализации посредством посылки кодовой части tj в станционную рельсовую цепь 15. При движении поезДа над шлейфом I и движении со скоростью меньше программной с вь1хода блока 5 сравнения снимается сигнал 1, формирующий команду, запрещающую служебное, торможение на поезде. Эта команда передается на поезд генератором 14 АЛС с помощью кодовой частоть tz и через станционную рельJ совую цепь 15, поездной приемник 16 АЛС поступает в исполнительный блок 17. В последнем случае (при ) выходной сигнал 1 на выходе блока 5 подается также на пятый вход блока 7 выделения программной скорости и запрещает прием сигнала ВИР с выхода блока 6 выделения программного замедления на вход блока 7 и размещает прием сигнала фактического замедления В с третьего выхода блока 8 измерения параметров на второй вход блока 7 выделения программной скорости. В тех случаях, когда фактическая скорость становится больше программной блок 5 сравнения скоростей выдает сигнал О, т. е. команду на включение служебного торможения на поезде, которая передается через элементы 14-16 в исполнительный блок 17. После того, как скорость поезда станет меньше программной, блок 7 выделения программной скорости вычисляет значение по формуле (So -S). и вместо сигнала Впр на вход блока 7 поступает значение фактического замедления В. При с выхода второго блока 5 сравне ния снова выдается сигнал I, запрещающий служебное торможение на поезде. Блок 8 измерения параметров движения поезда (фиг. 2) работает следующим образом. ,. 1 Импульсные сигналы от шлейфа I с постоянным шагод скрещивания поступают на входы счетчиков 10 и 11, соответственно, тактовых импульсов и пройденного пути и регистров 12 и 13 памяти текущей скорости и ускорения. На переднем фронте входного импульса счетчика 10 сбрасывается в нулевое состояние, регистр 12 памяти текущей скорости выдает свое содержимое на второй .„ выход, а регистр 13 памяти ускорения выдает свое содержимое на единственный На заднем фронте входного импульса счетчик 10 прекращает счет и его содержимое переписывается в регистр 12 памяти текущей скорости, в свою очередь, предыдущее содержимое регистра 12 переписывается в регистр 13 памяти текущего ускорения. При действии -го импульса от шлейфа счетчик 10 тактовых импульсов насчитывает п импульсов от генератора 9 тактовой частоты. Содержимое счетчика 10 поступает в регистр 12 памяти текущей скорости, где определяется и хранится значение скороети, причем У; tr- , KI f|.- S, Const - величина шага скрещивагде Д S ния шлейфа 1; tp -частота генератора 9 тактовых импульсов; V - скорость поезда при проходе над скрещиванием. В регистре 13 памяти текущего ускорения определяется и хранится значение ускорения, причем на -м шаге Б.- V -1-Vj К,/П1.,-к,/п , ;j К n,x . n.., где Кг VKt Значения nj., и nj переписываются на регистр 13 памяти текущего ускорения из счетчика 10 тактовых импульсов через регнстр 12 памяти текущей скорости. В счетчике И пройденного пути производится подсчет числа импульсов от шлейфа I, т. е. пройденный поездом путь от начала участка торможения. Выходы элементов 11 - 13 являются соответственно выходами текущего пути S, скорости V и ускорения В блока 8 измерения параметров движения поезда. Рассмотрим теперь работу блока 3 программного торможения (фиг. 1), который включает блок 20 программы начала торможения, датчик 21 состояния рельсов, датчик 22 длины состава и блок 23 задания графика движения, которые присоединены своими выходами ко входам корректирующего блока 24, выход которого является яыхолом б.ппкя .4 ппогпямтакже первым выходом блока 3 программного торможения, другим выходом которого является выход датчика 22 длины состава. При работе устройства дешифратор 2 типа состава через третий вход блока 24 коррекции выбирает кривую начала торможения VtfTi (S в блоке 20 в соответствии с типом подвижного состава. К четверто-му входу блока 24 коррекции присоединен выход датчика 22 определения длины сос воздействует на выбранную кривую УКТ( (S), выбранную в блоке 20 таким образом, чтобы изменять координаты остановки поездов различной длины, например, за счет параллельного- переноса кривой. ( той же целью (для изменения кривой начала торможения) выходной сигнал датчика 22 длины состава воздействует на третьи входы блоков 6 и 7 выделения программного замедления и скорости, изменяя знацекие длины участка торможения. Блок 23 задания графика движения соединен с пятым входом блока 24 коррекции. Если блок 23 не выдает сигнал на пропуск состава без остановки, то корректирующий блок 24 работает, как было описано выше. Если же блок 23 задания графика движения выдает сигнал 1 в корректирующий блок 24, то последний переносит кривую VHT (S) за пределы участка торможения, на котором установлен шлейф t. При этом поезд проследует участок торможения без остановки, что бывает необходимо для пропуска составов через станцию без остановки при организации движения поездов.
Устройство позволяет уменьшить время на торможение поездов на станциях при сохранении требуемой точности остановки.
Формула изобретения
Устройство для управления движением поезда, содержащее размещенный на пути генератор сигналов автоматической локомотивной сигнализации, соединенный с участком станционной рельсовой цепи, индуктивно связанной с поездным приемником автоматической локомотивной сигнализации, выход которого соединен с исполнительным блоком, индуктор, связанный с размещенным на пути шлейфом, отличающееся тем, что, с целью расширения эксплуатационных возможностей, оно снабжено размещенными на посту управления станции блоком измерения параметров движения поезда, выполненным на генераторе, счетчике тактовьтх импульсов и счетчике пройденного пути, выход которого является первым выходом блока, регистре памяTrf текущей скорости, выход которого является вторым выходом блока, и регистре памяти текущего ускорения, выход которого является третьим выходом блока, блоком программного торможения, двумя блоками сравнения скоростей, блоками выделения программного замедления и программной скорости и дешифратором типа состава, при этом шлейф с постоянньш шагом
скрещивания соединен с блоком измерения параметров движения и дешифратором, выход которого подключен к первому входу блока программного торможения, второй вход которого соединен с первыми
входами блоков выделения программной скорости и замедления и с первым выходом блока измерения параметров движения поезда, второй выход которого подключен к . первому входу одного и другого блока сравнения и ко. второму входу блока выделения программного замедления, а третий выход подключен ко второму входу блока .выделения программной скорости, первый выход блока программного торможения подключен через второй блок сравнекия с последовательно соединенными блоками выделения программного замедления и программной скорости со вторым блоком сравнения, выход которого подключен к генерауору сигналов автоматической локомотивной сигнализации, а второй выхоД
блока программного торможения соединен с третьими входами блокед выделения программного замедления и программной скорости, а четвертый вход блока выделения программной скорости подключен к выходу второго блока сравнения скоростей.
Источники информации, принятые во внимание при экспертизе . Авторское свидетельство СССР по заявке № 2131091/11, кл. В 61 L 3/02,. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением поезда | 1978 |
|
SU867750A1 |
| Устройство для управления торможением рельсового транспортного средства | 1985 |
|
SU1337302A1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |