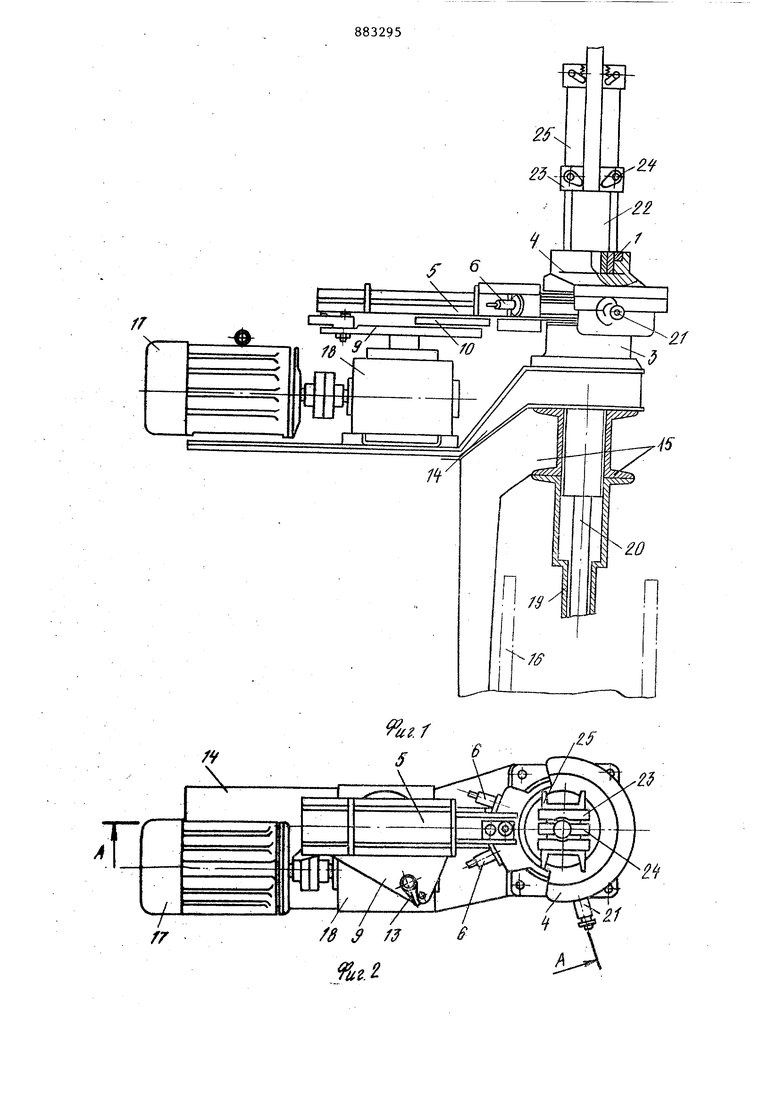
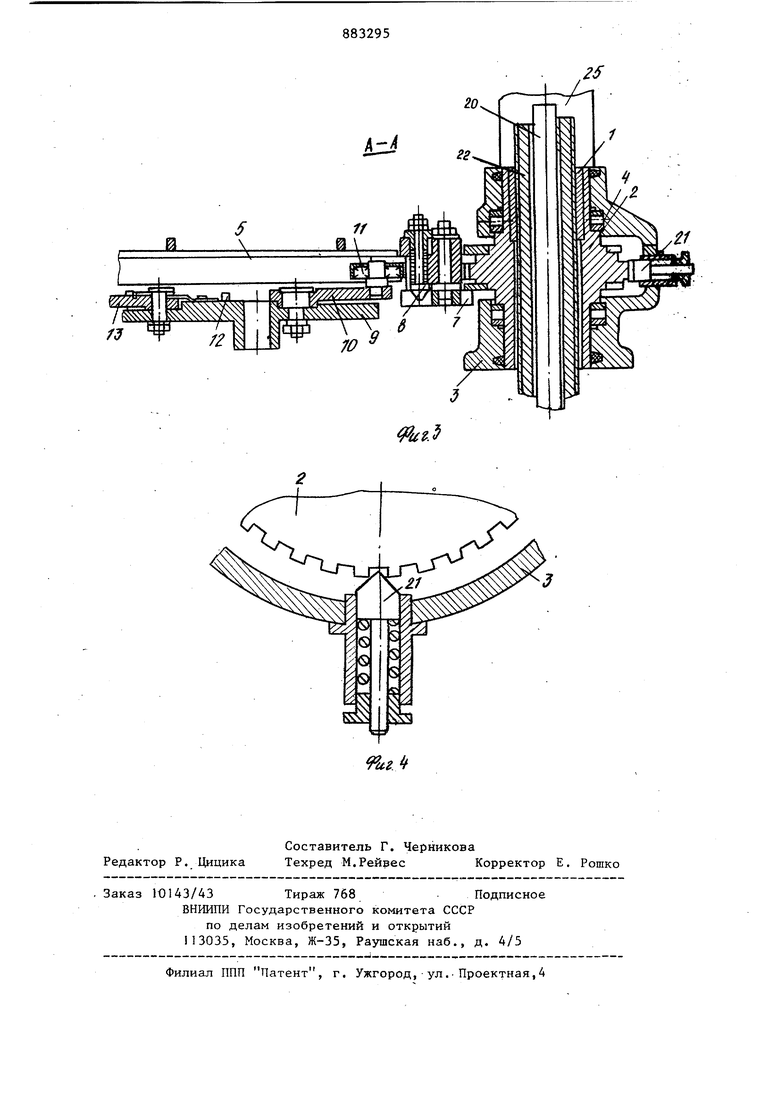
Изобретение относится к строитель ству и может найти применение для подъема скользящей и переставной опалубки. По основному авт. св. № 569690 из вестен подъемник опалубки, содержащи винтовую пару, храповой механизм, ко лесо которого жестко связано с ходовой гайкой винтовой пары, приводной кулисный механизм с кривошипом и эксцентрично установленный на послед нем дополнительный кривошип с ползуном, взаимодействующий с направляющей кулисы, на которой расположены собачки храпового механизма, имею щие механизм переключения, снабженный фиксатором его положения. Недостатком известного подъемника является то, что при малых нагруз ках на подъемном винте происходит самопроизвольный поворот храпового колеса с ходовой гайкой в исходное положение во время возвратного движения кулисного механизма. Ходовая гайка при этом совершает синхронно с кулисным механизмом возвратно-поворотные колебания и не перемещает подъемный винт. Кроме того, этот подъемник не может быть использован для подъема опалубки по домкратным стержням. Цель изобретения - повьшение надежности работы и расширение области применения. Поставленная день достигается тем, что в подъемнике опалубки, содержащем винтовую пару,храповой механизм, колесо которого жестко связано с ходовой гайкой винтовой пары, приводной кулисный механизм с кривошипом и эксцентрично установленный на последнем дополнительный кривошип с ползуном, взаимодействующий с направляющей кулисы, на которой расположены собачки храпового механизма, имеющие механизм их переключения, снабженный фиксатором его положения, корпус подъемника снабжен подпружинённым стопором и направляющими, а подъемный винт винтовой пары выполнен полым и снабжен ползуном с за жимными устройствами, смонтированными г установленных на .корпусе направ ляющих. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, в плане; на фиг. 3 - разрез А-А на фиг. 2 на фиг. 4 - узел установки подпружиненного стопора. Подъемник опалубки содержит винтовую пару, храповой механизм и приводной кулисный механизм с кривошипом. Ходовая гайка опирается на упор ные подшипники корпуса 3. и крьшки 4 подъемника. К храповому колесу 2 подвижно прикреплена кулиса 5, На кулисе расположены собачки 6 храпового механизма, скосы которых направ лены в разные стороны, а также переключатель 7 с подпружиненным фиксатором 8. Кривошип 9 кулисного механи: ма устанавливается Н выходной вал редуктора, закрепленного на заданном расстоянии от подъемника. На кривошипе 9 установлен дополнительный кривошип 10 с ползуном 11,движущимся по направляющей кулисы 5, а также упоры 12 дополнительно го кривошипа 10 и собачки 13 переключателя 7. Ось дополнительного кривошипа 10 расположена относительно оси вращения кривошипа 9 кулисного механизма на расстоянии, позволяющем изменять в заданных пределах величин эксцентриситета при попеременном опи рании на упоры 12.Каждая из собачек 13, взаимодействуя с переключате лем 7, производит переключение собаЧек 6 в начале вращения кривошипа 9 в соответствующем направлении. Система, состоящая из кривошипа 9 и дополнительного кривошипа IО с упорами 12,предназначена для автома гкческо изменения величины эксцентриситета при изменении направления вращения кривошипа 9. Для этого ось дополнительного кривошипа 10 находится в таком положении, что при вращении кривошипа 9 в одну сторону, дополнительный кривошип 10 поворачивается вокруг своей оси до одного из уп ров 12, увеличивая эксцентриситет, Системы до заданной величины, и при вращении кривошипа 9 в противополож ном направлении дополнительный кривошип 10 поворачивается до упора 12 в другую сторону, уменьшая эксцентриситет системы. Изменение эксцентриситета системы вызывает изменение угла поворота кулисы 5 при ее возвратно-поворотном движении. Для фиксации заданного положения дополнительного кривошипа 10 с ползу ном 11 и предотвращения его самопроизвольного отхода от упоров 12, оси дополнительного кривошипа 10 и его упора 12 расположены на кривошипе 9 кулисного механизма так, что дополнительный кривошип 10 при изменении направления вращения кривошипа 9 рачйвается на угол более 180 начальный момент отхода от упоров 12 увеличает. эксцентриситет. Автоматическое переключение направления вращения ходовой гайки 1 при реверсе электродвигателя производится собачками 13, взаимодействующими с-переключателем 7. Для предотвращения самопроизвольного переключения направления вращения ходовой гайки 1 и уменьшения шума в процессе работы подъемника, возникающего из-за повторрых ударов собачек 13, на кулисе установлен подпружиненный фиксатор 8, фиксирующий положение переключателя 7 и выводящий плечо этого переключателя из зоны действия собачек 13. Подъемник опалабки смонтирован на опорной раме 14, связанной через домкратную раму 15 со щитами опалубки 16. На опорной раме установлены также электродвигатель 17 и редуктор 18, внизу домкратной рамы 15 крепится защитная трубка 19, внутри которой расположен домкратный стержень 20. На корпусе 3 подъемника установлены подпружиненный регулируемый стопор 21, выполненный с двухсторонними скосами и взаимодействующий с храповым колесом 2. Подъемный винт 22 винтовой пары выполнен полым и в верхней части снабжен ползуном 23 с зажимными устройствами 24, смонтированными в установленных па корпусе 3, направляющими 25. Ползу г 25 позволяет винту 22 свободно перемещаться в вертикальном направлении и исключает его поворот. Подъемник работает следующим образом. Крутящий момент от электродвигателя 17 через редуктор 18, кулисный 5 механизм и храповой механизм, установленные на опорной раме 14, передается ходовой гайке 1, которая,поворачиваясь, поднимает или опускает полый винт 22, ползун 23 которого движется в осевом направлении по н равляющим 25 и препятствует повороту винта 22, , . При подъеме скользящей опалубки 16 с заданной скоростью дополнитель ный кривошип 10 с ползуном 11 кули сы 5 находится в положении с мини . мальным эксцентриситетом системы, а переключатель 7 выключает собачку 1 Холостого хода и включает собачку 13 рабочего хода. Собачка 13 рабоче го хода при повороте кулисы 5 в одну сторону входит во впадины храпового колеса 2, преодолевает сопротивление подпружиненного стопора 21 и поворачивает его совместно с х довой гайкой 1, а при повороте в противоположную сторону - набегает скосом на выступы храпового колеса 2, выходит из зацепления и проскальзывает мимо зубьев храпового колеса 2. При этом движении кулисы 5 подпружиненный стоттор 21 , находясь во впадинах храпового колеса 2 перпятствует возвращению его в первоначальное положение. При этом полый винт 22 своими зажимными устройствами 24 опирается на домкратны стержень а ходовая гайка 1, проворачиваясь, производит подъем опалубки 16, рабочих площадок и грузов находящихся на них. После подъема опалубки на высоту шага перемещения, электродвигатель включается на вращение в противололожную сторону. Во время вращения кривошипа 9 кулисного механизма в другом направлении упор 12 будет отходить от дополнительного кривощи па 10, при этом последний будет про ворачиваться вокруг своей оси, а его ползун 11 скользить вдоль направляющих кулисы 5, не проворачивая ее. При подходе к дополнительному кривошипу 10 второго упора 12, он прекращает вращение вокруг собственной оси и начинает вра1чаться совмест но с кривошипом 9 кулич:кого механизма вокруг его оси. Величина эксцентриситеса кривошипов 9 и 10 и, следовательно, угол качения кулисы 5 в этом положении дополнительного кривошипа 10 увеличивается на заданную величину. Одновременно одна из собачек 13 набегает на среднее плечо переключателя 7 и поворачивает его, а подпружиненный фиксатор 8 фиксирует новое положение переключателя и выводит его плечо из зоны действия собачек 13. При этом собачка 13 рабочего хода отводится от поверхности храпового колеса 2, а собачка 13 холостого хода отпускается и взаимодействует с зубьями храпового колеса 2. При таком положени собачек 13 и дополнительного кривошипа 10 ходовая гайка 1 будет проворачиваться в противоположную сторону с увеличенной скоростью, а подпружиненный стопор 21 опять, но уже другим скосом, препятствует самопроизвольному повороту храпового колеса 2 в исходное положение. В это время опалубка опирается на домкратный стержень 20 зажимными устройствами 24, а полый винт 22 поднимается вверх на свою высоту с увеличенной скоростью. Формула изобретения Подъемник по авт. св. № 569690, отличающийся тем, что, с целью повьшения надежности работы и расширения области применения, корпус подъемника снабжен подпружиненным стопоромИ направляющими, а подъемный винт винтовой пары выполнен полым и снабжен ползуном с зажимными устройствами, смонтироваными в установленных на корпусе направляющих. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 569690, кл. Е 04 G 11/24, 1977.
fT
E
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник опалубки | 1975 |
|
SU569690A1 |
| Устройство для привода питателя кормораздатчика | 1988 |
|
SU1542496A1 |
| Автоматический станок для шлифования желобков у внутренних колец шарикоподшипников | 1938 |
|
SU57463A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Механизм привода реверсивного транспортера машины для распределения сыпучего материала | 1989 |
|
SU1648270A1 |
| Делительная машина | 1958 |
|
SU118618A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ЛИСТОВЫХ ДЕТАЛЕЙ, ПРЕИМУЩЕСТВЕННО ФЛАНЦЕВ ИЗ ШИН К ВОЗДУХОВОДАМ И СЕКЦИЙ КАРМАННЫХ ФИЛЬТРОВ ОЧИСТКИ ВОЗДУХА | 2015 |
|
RU2617805C2 |
| Станок для резки заготовок клиновидных ремней | 1950 |
|
SU102844A1 |
| Ручные ножницы | 1978 |
|
SU747633A1 |
| Гайковерт | 1975 |
|
SU577122A1 |