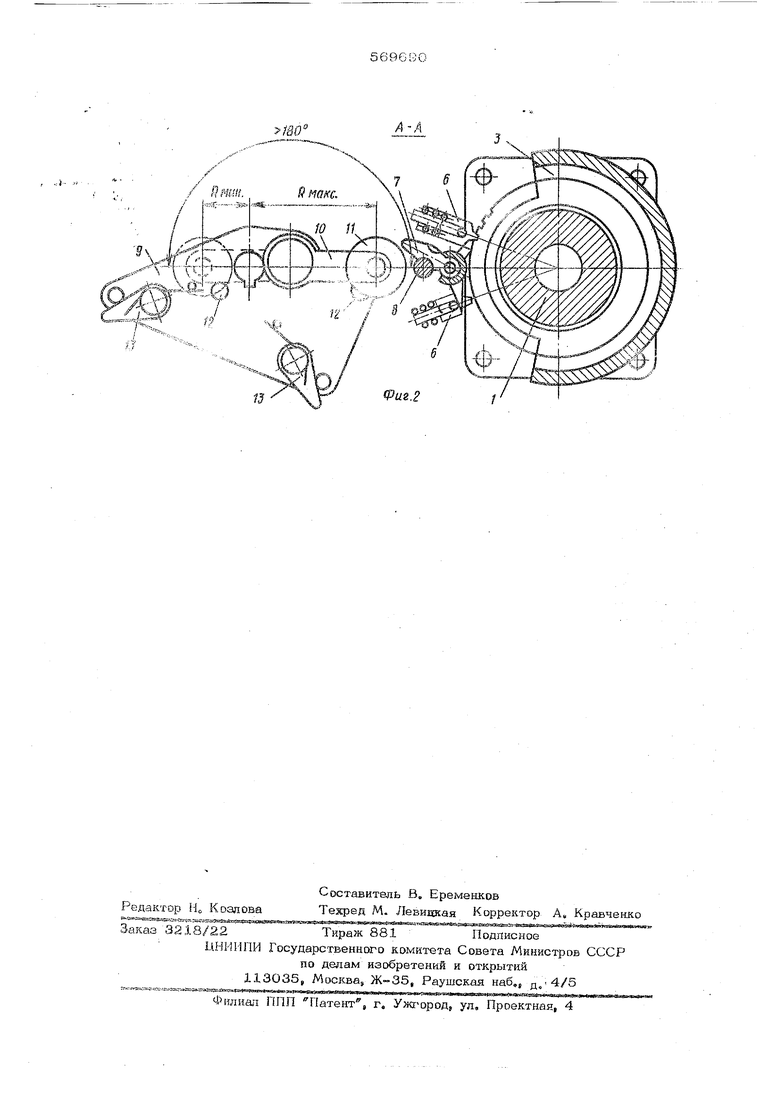
(54) ПОДЪЕМНИК ОПАЛУБКИ ключатель 7 с подпружиненным фиксатором 8 Кривошип 9 кулисного механизма устанавливается на выходной вал редуктора, закрепле ного на заданном расстоянии от подъемника, На кривошипе 9 установлен дополнительный кривошип 10 с ползуном 11, движущимся по направляющей кулисы 5, а также упоры 12 дополнительного кривошипа и собачки 13 переключателя 7, Ось допопнительноаго кривошипа расположена относительно оси вращения кривошипа кулисного механизма на расстоянии, позволяющем изменять а заданных пределах величину эксцентриситета при попеременном опирании на упоры 12. Каждая HSсобачек 13, взаимодействуя с пе|юключателем 7, производит переключение ;собачек б в начале вращения кривошипа 9 в соответствующем направлении Система, состоящая из кривошипа 9 и дополнительного кривошипа 10с упорами 12 предназначена для автоматического изменения величины эксцентрнсн тета при изменении направления вращения кривошипа 9, С этой целью- ось допшнительHctro кривошипа- 1О находится в таком попожении, когда при вращении кривошипа 9 в одну сторону дополнительный кривошип 10 поворачивается вокруг своей оси до одного из упоров 12, увеличивая эксцентриситет системы до заданной величины, а при вращении кривошипа 9 в противоположном напра&лении дополнительный кривошип 10 поворачивается до упора в другую сторону, уменьшая эксцентриситет системы. Изменение эксцентриситета системы вызывает изменение угла поворота кулисы 5 при ее возвратно-поворотном движении, -Для фиксации заданного положения допсетнительного кривошипа 10 с ползуном 11 и предотвращения,, его самопроизвольного отхода от упоров 12 ось дополнительного кривошипа и его упоры расположены на кривошТ пе кулисного механизма так, что дополнител ный кривошип 10 при изменении направления врйщения кривошипа 9 поворачивается на угол более 180 и в начальный момент отхода от упоров 12, увеличивает эксцентриситет, Автоматическое переключение направления вращения ходовой гайки 1 при реверсе электродвигателя производится собачками 13, взаимодействующими с переключателем 7, Для предотвращения самопроизвольного; переключения направления вращения ходовой гайки 1 и уменьшения шума в процессе работы подъемника, возникающего иэ-за пов торных ударов собачек 13, на кулисе 5 уст новлен подпружиненный фиксатор 8, фиксирующий положение переключателя 7 и выводящий плечо этого переключателя из зоны действия собачек 13, Подъемник работает следующим образом. Крутящий момент от электродвигателя ерез червячный редуктор, механизм качаюейся кулисы 5 и храповой механизм, устаовленные на ригеле опорной рамы- 14, пеедается ходовой гайке 1, которая, повораиваясь, перемещается по винту, соединенноу с рамой 15 опалубки 16, При подъеме скользящей опалубки 16 с аданной технологической скоростью дополительный, кривошип 10 с ползуном 11 наодится в положении с минимальным эксценриситетом системы, а переключатель 7 вылючил собачку холостого хода и включвд обачку рабочего хода. Собачка рабочего хоа при повороте кулисы 5 в одну сторону ходит во впадины храпового колеса 2 и про .БОрачивает его совместно с ходовой гайкой 1, повороте в противоположную сторону - набегает скосом на выступы зубьев храпового колеса, выходит из зацепления и проскальзывает мимо зубьев храпового колеса, При этом производится подъем опалубки, рабочих площадок и грузов, находящихся на Для подъема нижних опорных звеньев необходимо после выполнения операций по переопиравию включить электродвигатель на вращение в: противоположную сторону. Во время вращениякривошипа кулисного механизма в другом направлении упор 12 будет отходить от дополнительного кривошипа 10, При этом дополнительный кривошип будет проворачиваться вокруг своей оси, а его ползун 11 скользить вдоль направляющей кулисы 5, не поворачивая ее, При подходе к дополнительному кривошипу 10 второго упора дополнительный кривощип прекращает вращение вокруг собственной оси и начинает вращаться совместно с кривошипом кулисного механизма вокруг его оси. Величина эксцентриситета кривошипов и, следовательно, угол качания кулисы 5 в этом положении дополнительного кривошипа увепи чивается на заданную величину, Одновреме но одна из собачек набегает на среднее пле40 переключателя собачек храпового механизма и поворачивает его, а подпружиненшый фиксатор 8 фиксирует новое положение переклю чателя и выводит его плечо из зоны дейс-рвия собачек 13, При этом собачка рабочего хода отводится от поверхности храпового ко-,леса, а собачка холостого хода отпускается и взаимодействует с зубьями храпового колеса 2. При таком положении собачек и дополнительного кривошипа ходовая гайка будет npi ворачиваться в противоположную, сторону с увеличенной скоростью.
5
op мул а изобретения
1, Подъемник опалубки, содержащий винтовую пару, храповой механизм, колесо которого жестко связано с ходовой гайкой винтовой пары, и приводной кулисный механизм с кривошипом, отличающийся тем, что, с целью автоматического изменения скорости и направления вращения храпового колеса, он снабжен эксцентрично установленным на кривошипе кулисного механизма допачнитепьным кривошипом с ползуном, взаимодействующим с направляющей кулисы,
на хоторой расположены собачки храпового
мегшнизма, имеющие механизм их переключения ,
2 .Подъемнкг, по н. Is о 7 л и ч а ю щ и и С я тем., что механизм парекгаочения собачек снабжеа фиксатором агопдаожений. Источники амбс.: viaiMKf принятые во аиимйние при экспертизе;
1, Брошюра Рыгомендацйй но возведению монолитных железобега.чных стен резервуарных складов бecoтeps Hi- : дв1одо&{ в nofe вижной опапубке Госс-гоо.- СССРр .ГЬ/нгенкий Промстройниипроектг .U:.ibLUi; 1,974 г,;,стр, 9-11 ,


| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник опалубки | 1980 |
|
SU883295A2 |
| Механизм привода реверсивного транспортера машины для распределения сыпучего материала | 1989 |
|
SU1648270A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВОГО ЖЕЛОБА | 1969 |
|
SU249232A1 |
| Привод каретки плосковязальной машины | 1990 |
|
SU1805149A1 |
| Зубообрабатывающий станок для изготовления крупномодульных колес внутреннего зацепления | 1983 |
|
SU1151389A1 |
| Гайковерт | 1975 |
|
SU577122A1 |
| Автоматический станок для шлифования желобков у внутренних колец шарикоподшипников | 1938 |
|
SU57463A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Приводной механизм диапроектора | 1972 |
|
SU443354A1 |
| Устройство для выгрузки кормов из башен | 1984 |
|
SU1192716A1 |