(54) РЕГУЛЯТОР СКОРОСТИ ВРАЩЕНИЯ ДЛЯ МИКРОЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
1
Изобретение относится к электротехнике и может быть использовано в электропроигрывающих устройствах, лентопротяжных механизмах устройств магнитной записи и устройствах программного управления.
Известен регулятор скорости микродвигателя постоянного тока, в котором в качестве сигнала обратной связи используется сигнал импульсного датчика, преобразуемый при помощи преобразователя частота-скважность в сигнал управления усилителем мощности, нагруженным на электродвигатель .
Известный регулятор не обладает способностью сохранять режим стабилизации при большом изменении момента нагрузки на валу двигателя в широком диапазоне скоростей. .
Наиболее близким по технической сущности к изобретению является регулятор скорости вращения для микроэлектродвигателя постоянного тока, содержащий последовательно соединенные импульсный датчик скорости вращения, преобразователь частота-напряжение, пороговое устройство.
усилитель мощности, к выходу которого подключен электродвигатель.
Преобразователь частота-напряжение представляет собой устройство формирования пилообразного напряжения, наложен, ного на постоянное. Последнее изменяется пропорционально частоте сигнала импульсного датчика и, соответственно, скорости вращения ротора электродвигателя. Это суммарное напряжение поступает на пороговое устройство, где реализуется преобto разование напряжение-скважность. Выходные импульсы порогового устройства управляют усилителем мощности. До момента достижения суммарным напряжением порога срабатывания порогового устройства, что имеет место например при разгоне элект5 родвигателя, к двигателю через усилитель мощности подводится напряжение источника питания. При превышении указанного порога начинают формироваться импульсы со скважностью пропорциональной скорости вращения электродвигателя. Таким об20разом, стабилизация скорости вращения ротора электродвигателя при изменении момента нагрузки на валу происходит путем соответствующего изменения действующего значе ния питающего электродвигатель напряжения за счет изменения скважности импульсов 2.
Недостатком регулятора является узкий диапазон стабилизируемых скоростей. На .пример, если на нижней границе диапазона стабилизации номинальная скважность равна 10 (больше; выбирать нецелесообразно по причине существенного возрастания требований к стабильности периода импульсов датчика), то верхняя граница диапазона может превышать нижнюю не более чем в 10 раз, при этом допустимый диапазон моментов нагрузки на вал (динамический диапазон) будет крайне узок ввиду невозможности дальнейшего уменьшения скважности.
Целью изобретения является расширение диапазона регулируемых скоростей.
Поставленная цель достигается тем, что в известный регулятор скорости вращения микроэлектродвигателя IIVcтoяннpгo тока дополнительно введены делитель частоты, схема совпадения И, три переключателя, диод и конденсатор, причем выход импульсного датчика скорости вращения соединен со входом первого переключателя, первый выход которого соединен со входом делителя частоты, а второй - со входом преобразователя частота-напряжение и первым выходом делителя частоты, второй выход делителя частоты соединен с. первым входом, второго переключателя, выход которого соединен с одним из входов схемы совпадения И, другой вход схемы совпадения И соединен с выходом порогового устройства и вторым входом второго переключателя, выход схемы совпадений И связан со входом усилителя мощности, выход которого соединен с первым входом третьего переключателя, второй вход третьего переключателя через диод соединен с источником питания усилителя мощности, а через конденсатор - с выходом усилителя мощности, выход третьего переключателя соединен с электродвигателем.
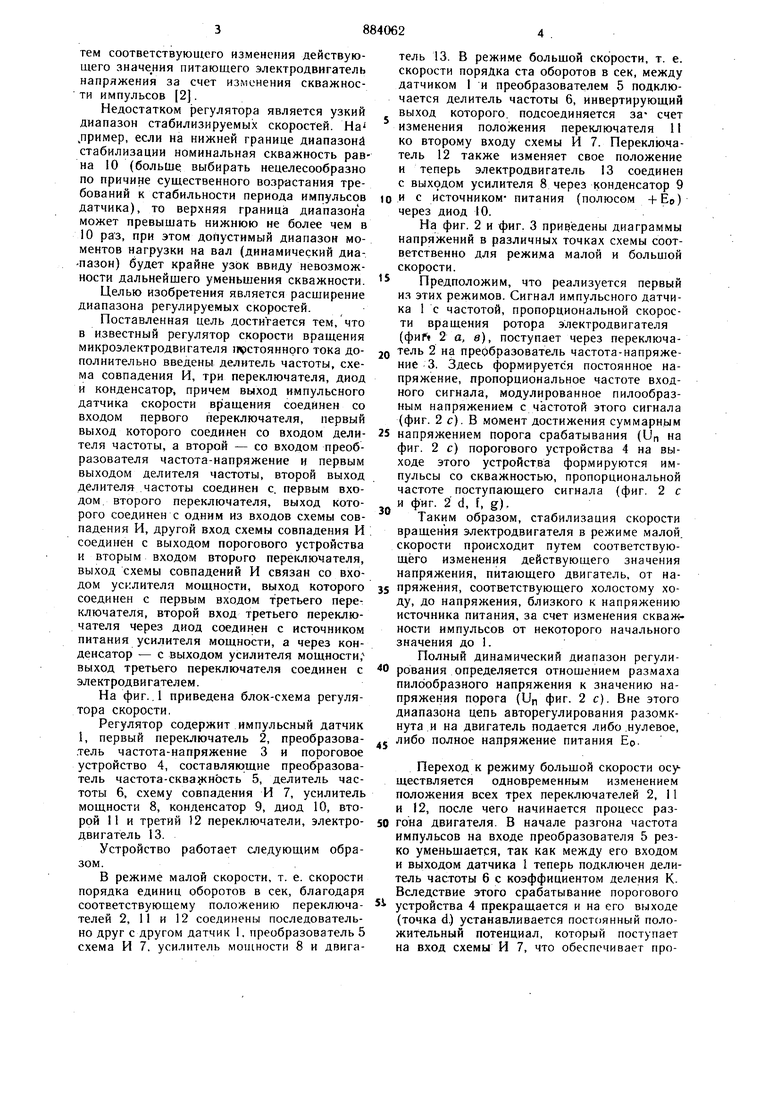
На фиг., I приведена блок-схема регулятора скорости.
Регулятор содержит импульсный датчик 1, первый переключатель 2, преобразова.тель частота-напряжение 3 и пороговое устройство 4, составляющие преобразователь частота-скважность 5, делитель частоты 6, схему совпадения И 7, усилитель мощности 8, конденсатор 9, диод 10, второй 11 и третий 12 переключатели, электродвигатель 13.
Устройство работает следующим образом.
В режиме малой скорости, т. е. скорости порядка единиц оборотов в сек, благодаря соответствующему положению переключателей 2, 11 и 12 соединены последовательно друг с другом датчик 1. преобразователь 5 схема И 7, усилитель моишости 8 и двигатель 13. В режиме большой скорости, т. е. скорости порядка ста оборотов в сек, между датчиком 1 и преобразователем 5 подключается делитель частоты 6, инвертирующий выход которого, подсоединяется за счет изменения положения переключателя II ко второму входу схемы И 7. Переключатель 12 также изменяет свое положение и теперь электродвигатель 13 соединен с выходом усилителя 8 через конденсатор 9
О и с источником- питания (полюсом +Ео) через диод 10.
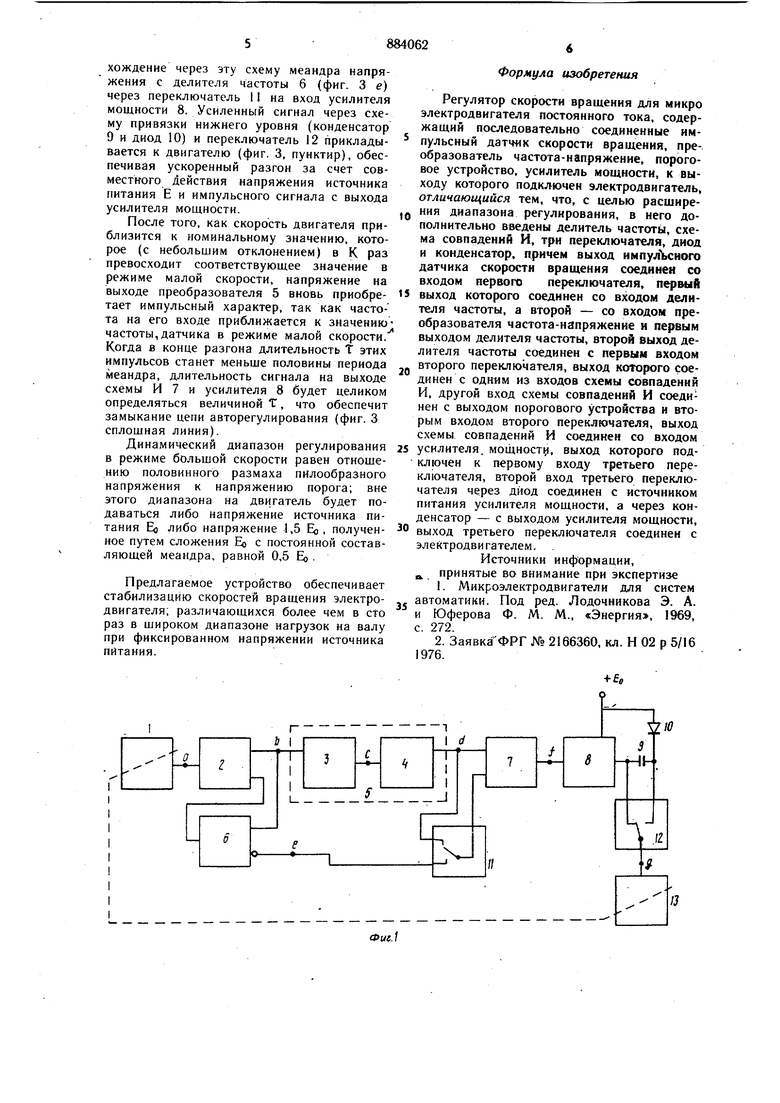
На фиг. 2 и фиг. 3 приведены диаграммы напряжений в различных точках схемы соответственно для режима малой и большой скорости.
Предположим, что реализуется первый из этих режимов. Сигнал импульсного датчика 1 с частотой, пропорциональной скорости вращения ротора электродвигателя (фиЛ 2 а, в), поступает через переключатель 2 на преобразователь частота-напряжение 3. Здесь формируется постоянное напряжение, пропорциональное частоте входного сигнала, модулированное пилообразным напряжением с частотой этого сигнала (фиг. 2 с). В момент достижения суммарным
5 напряжением порога срабатывания (Un на фиг. 2 с) порогового устройства 4 на выходе этого устройства формируются импульсы со скважностью, пропорциональной частоте поступающего сигнала (фиг. 2 с и фиг. 2 d, f, g).
Таким образом, стабилизация скорости вращения электродвигателя в режиме малой, скорости происходит путем соответствующего изменения действующего значения напряжения, питающего двигатель, от напряжения, соответствующего холостому ходу, до напряжения, близкого к напряжению источника питания, за счет изменения скважности импульсов от некоторого начального значения до 1.
Полный динамический диапазон регулирования определяется отношением размаха пилообразного напряжения к значению напряжения порога (Up фиг. 2 с). Вне этого диапазона цепь авторегулирования разомкнута и на двигатель подается либо .нулевое,
, либо полное напряжение питания ЕО.
Переход к режиму большой скорости осуществляется одновременным изменением положения всех трех переключателей 2, 11 и 12, после чего начинается процесс разгона двигателя. В начале разгона частота импульсов на входе преобразователя 5 резко уменьшается, так как между его входом и выходом датчика 1 теперь подключен делитель частоты 6 с коэффициентом деления К. Вследствие этого срабатывание порогового
устройства 4 прекращается и на его выходе (точка d.) устанавливается постоянный положительный потенциал, который поступает на вход схемы И 7, что обеспечивает прохождение через эту схему меандра напряжения с делителя частоты б (фиг. 3 е) через переключатель 11 на вход усилителя мощности 8. Усиленный сигнал через схему привязки нижнего уровня (конденсатор 9 и диод 10) и переключатель 12 прикладывается к двигателю (фиг. 3, пунктир), обеспечивая ускоренный разгон за счет совместного действия напряжения источника питания Е и импульсного сигнала с выхода усилителя мощности. После того, как скорость двигателя приблизится к номинальному значению, которое (с небольщим отклонением) в К раз превосходит соответствующее значение в режиме малой скорости, напряжение на выходе преобразователя 5 вновь приобретает импульсный характер, так как частота на его входе приближается к значению частоты,датчика в режиме малой скорости. Когда в конце разгона длительность Т этих импульсов станет меньще половины периода меандра, длительность сигнала на выходе схемы И 7 и усилителя 8 будет целиком определяться величиной Т, что обеспечит замыкание цепи авторегулирования (фиг. 3 сплошная линия). Динамический диапазон регулирования в режиме большой скорости равен отнощению половинного размаха пилообразного напряжения к напряжению порога; вне этого диапазона на двигатель будет подаваться либо напряжение источника питания ЕО либо напряжение 1,5 , полученное путем сложения ЕО с постоянной составляющей меандра, равной 0,5 ЕО . Предлагаемое устройство обеспечивает стабилизацию скоростей вращения электродвигателя; различающихся более чем в сто раз в широком диапазоне нагрузок на валу при фиксированном напряжении источника питания. Формула изобретения Регулятор скорости вращения для микро электродвигателя постоянного тока, содержащий последовательно соединенные импульсный датчик скорости вращения, преобразователь частота-напряжение, пороговое устройство, усилитель мощности, к выходу которого подключен электродвигатель, отличающийся тем, что, с целью расширения диапазона регулирования, в иего дополнительно введены делитель частоты, схема совпадений И, три переключателя, диод и конденсатор, причем выход импульсного датчика скорости вращения соединен со входом первого переключателя, первый выход которого соединен со входом делителя частоты, а второй - со входом преобразователя частота-напряжение и первым выходом делителя частоты, второй выход делителя частоты соединен с первым входом второго переключателя, выход которого соединен с одним из входов схемы совпадений И, другой вход схемы совпадений И соединен с выходом порогового устройства и вторым входом второго переключателя, выход схемы совпадений И соединен со входом усилителя. МО1ЦНОСТУ, выход которого подключен к первому входу третьего переключателя, второй вход третьего переключателя через диод соединен с источником питания усилителя мощности, а через конденсатор - с выходом усилителя мощности, выход третьего переключателя соединен с электродвигателем. Источники информации, принятые во внимание при экспертизе 1.Микроэлектродвигатели для систем автоматики. Под ред. Лодочникова Э. А. и Юферова Ф. М. М., «Энергия, 1969, с. 272. 2.ЗаявкаФРГ № 2166360, кл. Н 02 р 5/16 1976.
У
fl,b
УЛ с
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости вращения для микроэлектродвигателя постоянного тока | 1980 |
|
SU957401A2 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1042151A1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780132A1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| Устройство для автоматического управления автономной электроэнергетической установкой | 1980 |
|
SU879727A1 |

9
О
Фиг. 2.
Un.
С
±
t
i
