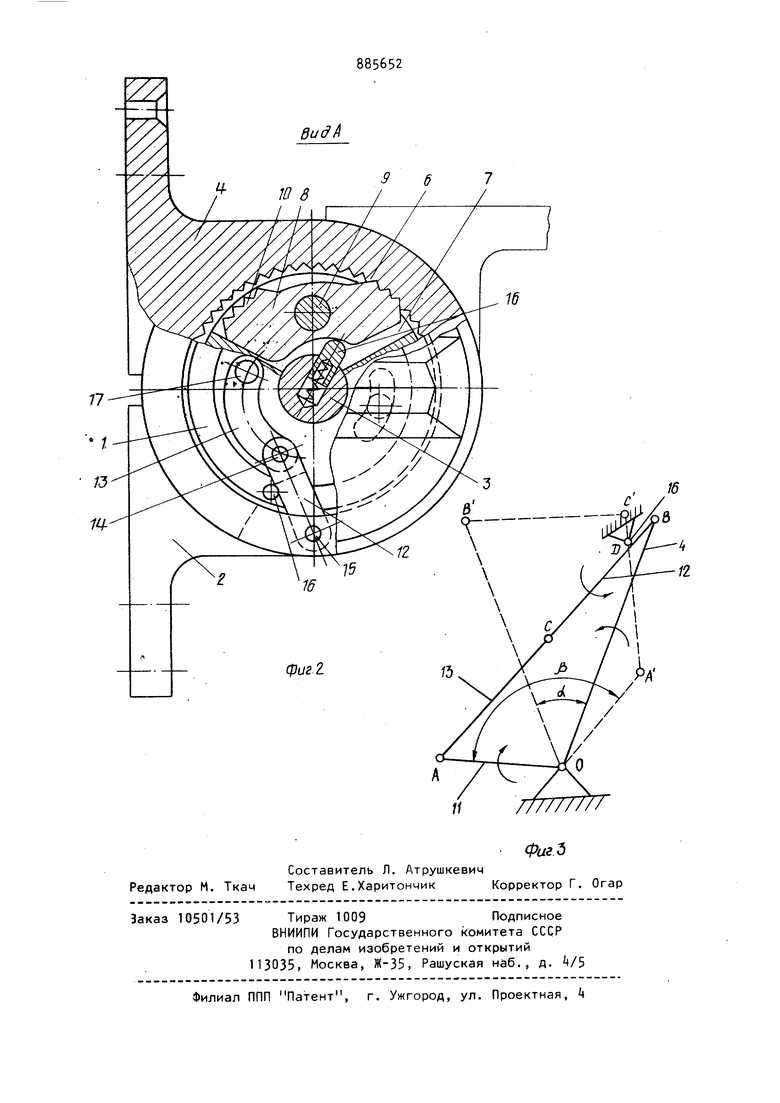
Изобретение относится к машиностроению. Известен храповой механизм двусто роннего действия, содержащий цилиндрический барабан, на одном торце которого закреплен неподвижный рычаг, а на другом соосно барабану установлен вал с фланцем и подви))ный рычаг с зубьями, взаимодействующими с зубь ми собачки иЗОднако этот механизм не обеспечивает надежную фиксацию его элементов при изменении направления вращения. Цель изобретения - повышение надежности. Поставленная цель достигается за счет того, что храповой механизм дву стороннего действия снабжен управляю щим устройством, содержащим диск, установленный на валу с возможностью ограниченного углового перемещения, два рычага,шарнирно соединенных между собой и свободными концами - с .подвижным рычагом и с диском, толкатель, расположенный на валу и контактирующий с собачкой, при этом в барабане выполнен радиальный паз, в котором размещена собачка и часть толкателя. На фиг. 1 показан предлагаемый механизм, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - кинематическая схема управляющего устройства. Предлагаемый храповой механизм состоит из ступенчатого цилиндрического барабана 1, хвостовая часть которого выполнена в виде квадрата и обеспечивает неподвижное соединение с неподвижным рычагом 2. 8 торце барабана 1 имеются соосно расположенные цилиндрические отверстия, в меньшем из которых установлен фланцевый вал 3. На наружной поверхности барабана 1 имеется проточка, в которой для ограничения перемещения подвижного рычага установлено стопорное колыдо 5. Подвижный рычаг имеет ступенчатое цилиндрическое отверстие. На поверхности одной из ступеней этого отверстия выполнены зубья 6.
В барабане 1 выполнен радиальный паз 7, в который входит сегментная собачка 8, сидящая на гальце 9. Собачка 8 имеет зубья 10, расположенные по дуге с двух сторон. Она вхоцит в зацепление с зубьями 6 подвижного рычага . Около внутреннего торlua фланцевого вала 3 в большем отьерстии барабана 1 установлено управляющее устройство, имеющее диск 11, свободно сидящий на цилиндрической шейке вала 3, плоский двухзвенник, который состоит из рычага 12 и рычага 13- Рычаг 13 соединен при помощи пальца 1А с рычагом 12. В сво очередь рычаг 12 свободно установлен на подвижном рычаге на пальце 15Для ограничения перемещения плоскЬго двухзвенника в торце барабана неподвижно установлен упор 16.
Управляющий диск 11 снабжен неподвижным пальцем 17 и стойкой 18. На пальце 17 свободно поворачивается рычаг 13 двухзвенника. Стойка 18 входи в дуговой паз 15,расположенный с вну.ренней стороны торца фланцевого вала 3- В фланцевом валу 3 также установлен подпружиненный в радиальном направлении толкатель 20. прижимающий собачку 8 и контактирующий с ее внутренней радиусной поверхностью. Толкатель 20 также фиксирует фланцевый вбл 3 от осевого перемещения, так как частично расположен в радиальном пазу 7 барабана 1 .
Механизм работает следующим образом.
При повороте подвижного рычага относительно неподвижного рычага 2 поворачивается рычаг 12 двухзвенника до положения, когда его боковая сторона не натолкнется на упор 1б. В этот момент рычаг 12 увлекает за собой рычаг 13 в сторону, противоположную вращению подвижного рычага , в рычаг 13 в свою очередь, поворачивает диск 11 вместе со стокой 18 в сторону, противог оложную вращению подвижного рычага Ц до тех пор, пока стойка 18 не упрется в боковую поверхность дугового паза 19. В этот момент вместе с диском 11 начинает поворачиваться фланцевый вал 3 с подпружиненным толкателем 20, Толкатель 20 скользит по внутренне поверхности собачки 8, поворачивает ее на пальце 9, в результате чего зубья 10 собачки 8 с одной стороны выходят из зацепления, а с другой стороны входят в зацепление с зубьями 6 подвижного рычага . Так как барабан 1 и собачка 8 образуют с рычагами 2 и Ц одно целое, осуществляется фиксация по ходу поворота подвижного рычага 4 относительно неподвижного рычага 2, фиксирование положения рычагов 2 и it при вращении одного из них в любом из направлений осуществляется до момента переключения собачки 8 с одного крайнего положения в другое.
Для фиксации рычагов 2 и k при вращении одного из их в направлеНИИ, противоположном первоначальному, необходимо повернуть фланцевый вал 3 в исходное положение и цикл
повторяется в обратном направлении.
Предлагаемый механизм обеспечизает надежную фиксацию перемещающихся |дна относительно другой деталей.
Формула изобретения
Храповой механизм двустороннего действия, содержащий цилиндрический барабан, на одном торце которого закреплен неподвижный рычаг, а на другом соосно барабану установлен вал с фланцем и подвижный рычаг с зубьями, взаимодействующими с зубьями собачки, отличающийся тем, что, с целью повышения надежности,
он снабжен управляющим устройством, содержащим диск, установленный на валу с возможностью ограниченного углового перемещения, два рычага, шарнирно соединенных между собой и
свободными концами - с подвижным рычагом и с диском, толкатель, расположенный на валу и контактирующий с собачкой, при этом в барабане выполнен радиальный паз , в котором размещена собачка и часть толкателя.
Источники инфомации, принятые во внимание при экспертизе
1. Выложенная заявка ФРГ f , кл. F 16 D 11/00, 1975
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2013675C1 |
| Устройство для отбраковки бутылок, наполненных прозрачной жидкостью | 1974 |
|
SU519391A1 |
| Устройство для правки лезвий безопасных бритв | 1990 |
|
SU1712131A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2031268C1 |
| Автомат к лесопосадочной машине для подачи сеянцев | 1988 |
|
SU1613024A2 |
| Станок для сверления отверстий в накладках тормозных колодок автомобиля | 1991 |
|
SU1814591A3 |
| Загрузочное устройство | 1990 |
|
SU1815136A1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |