Способ нейтрализации погрешностей подвижных бесплатформенных инерциальных геодезических систем.
Заявленное изобретение относится к измерению (определению) пути и ориентации подвижного объекта, может быть использовано при выполнении геодезических работ в условиях высокой автономности.
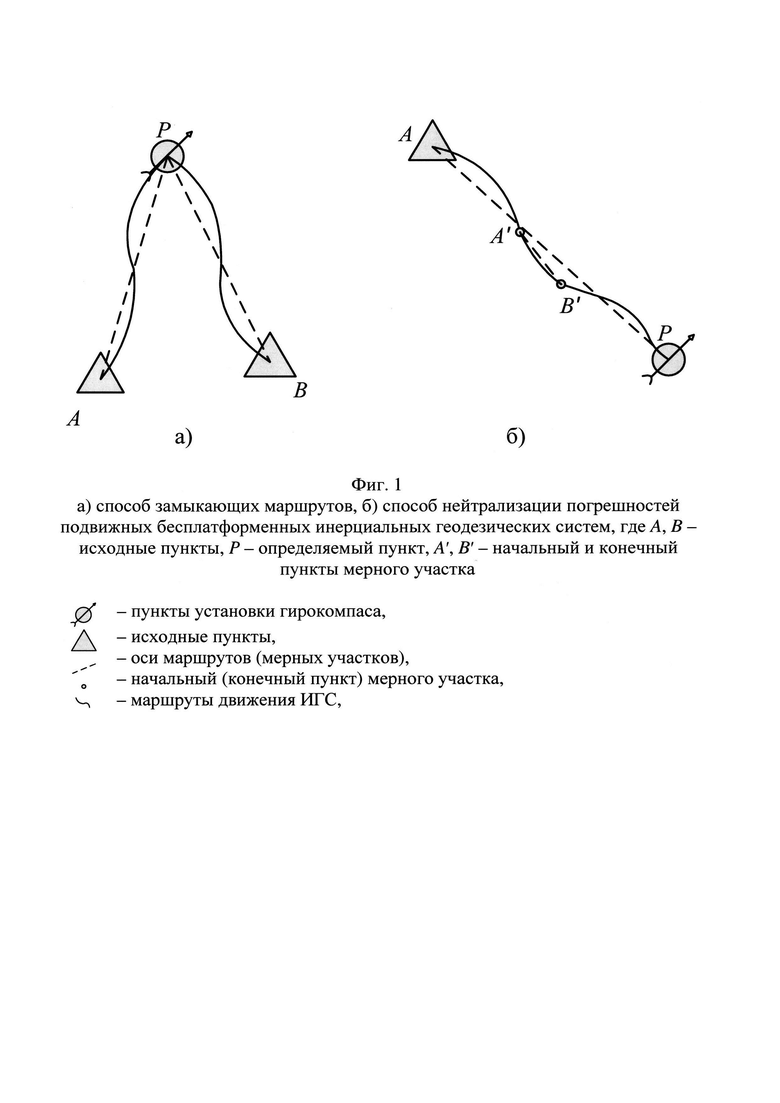
Известен способ замыкающих маршрутов (фиг. 1) [Воронков Н.Н. Гироскопическое ориентирование. Учебник. - М.: ВИА, 1968. - 342 с.; с. 329]. Способ включает: определение приращений координат между определяемым пунктом Р и исходными пунктами А и В (пунктами с известными координатами) с применением подвижных инерциальных геодезических систем; определение дирекционных углов между определяемым пунктом и исходными пунктами; уравнивание дирекционных углов; раздельное уравнивание абсциссы и ординаты [Руководство по астрономо-геодезическим работам при топогеодезическом обеспечении войск. Часть 1. Геодезические работы, отв. редактор Воронков Н.Н. - М.: РИО ВТС, 1980. - 423 с.; с. 301].
Для реализации способа необходима прямая видимость между исходными и определяемым пунктом для определения дирекционных углов между ними; маршруты (между определяемым и исходными пунктами) должны быть вытянутыми и при этом общий маршрут должен начинаться и заканчиваться на исходных пунктах. Эти условия существенно ограничивают выбор исходных пунктов, а когда исходных пунктов, удовлетворяющих описанным условиям, менее двух способ не реализуем.
Заявленное изобретение предназначено для определения координат пунктов с применением подвижных бесплатформенных инерциальных геодезических систем в условиях автономности: недостаточности исходной геодезической основы (ИГО), отсутствия видимости небесных тел, отсутствия приема сигналов спутниковых радионавигационных систем.
Технический результат применения заявленного способа выражается в определении координат пунктов в условиях автономности; в сокращении числа требуемых для реализации способа исходных пунктов до одного; в увеличении допустимой протяженности маршрута между исходным пунктом и определяемым.
Технический результат применения заявленного способа достигается путем определения приращений координат между определяемым пунктом и одним исходным пунктом с применением подвижных инерциальных геодезических систем; уравнивания дирекционных углов; раздельного уравнивания абсциссы и ординаты; в отличии от прототипа выполняются:
определение конечного дирекционного угла оси маршрута с применением подвижных инерциальных геодезических систем;
определение протяженности оси мерного участка А'В' с применением подвижных инерциальных геодезических систем;
определение конечного дирекционного угла маршрута с применением гирокомпаса;
определение протяженности оси мерного участка с применением дальномера.
В качестве мерного участка А'В' выбирается прямой участок маршрута с видимостью между его концами.
Реализация способа. Способ замыкающих маршрутов реализуют с применением инерциальных геодезических систем (ИГС) (например, подвижный навигационный геодезический комплекс). Чувствительными элементами (ЧЭ) ИГС являются блоки акселерометров и датчиков угловой скорости (ДУС). С ЧЭ непрерывно с высокой частотой снимаются данные о ускорении и пространственной ориентации ИГС. Путем двойного интегрирования ускорения по времени получают значения пройденного ИГС пути. Данные о пройденном пути и пространственной ориентации позволяют вычислить приращение координат от начала маршрута движения ИГС до любой точки этого маршрута.
Если известны координаты начальной точки маршрута передвижения ИГС, то, используя полученные при помощи ЧЭ приращения, возможно вычислить координаты любой точки маршрута движения ИГС. Полученные таким образом координаты будут отягощены систематическими погрешностями, связанными с дрейфом инерциальных ЧЭ. Величина этих погрешностей будет увеличиваться с увеличением времени работы ЧЭ. Погрешности координат (приращений) можно представить в виде двух составляющих: погрешности обусловленные уходом (дрейфом) ДУС и погрешности обусловленные акселерометрами. Первая группа составляет погрешность определения ориентации (погрешность дирекционного угла), вторая группа составляет погрешность определения пройденного пути (погрешность масштаба). Погрешность определения дирекционного угла вносит наибольший вклад в погрешность определения приращений координат с применением ИГС.
Если известны координаты начальной и конечной точек маршрута передвижения ИГС и дополнительно измерены дирекционные углы между определяемым и сходными пунктами, то, используя полученные при помощи ЧЭ приращения, возможно не только вычислить координаты любой точки маршрута движения ИГС, но и частично нейтрализовать погрешности определения приращений координат, связанные с дрейфом инерциальных ЧЭ. Нейтрализация погрешности реализуется путем аналогичным уравниванию полигонометрического хода [Воронков Н.Н. Гироскопическое ориентирование. Учебник. - М.: ВИА, 1968. - 342 с.; с. 331]. Сначала уравниваются дирекционные углы; затем раздельного уравниваются абсциссы и ординаты.
Проблемами, существенно ограничивающими применение способа замыкающих маршрутов, являются: необходимость обеспечения прямой видимость между исходными и определяемым пунктом (для определения дирекционных углов гироскопическим или астрономическим методом ориентирования); требование к вытянутости маршрутов движения ИГС и обязательная замкнутость общего маршрута на исходных пунктах. В этих условиях ограничен выбор исходных пунктов, а когда исходных пунктов, удовлетворяющих описанным условиям, менее двух способ не реализуем. Подобные проблемы реализации способа замыкающих маршрутов не позволяют применять его в условиях высокой автономности: недостаточности ИГО, отсутствия видимости небесных тел, отсутствия приема сигналов спутниковых радионавигационных систем.
Предлагаемый способ нейтрализации погрешностей подвижных бесплатформенных инерциальных геодезических систем лишен указанных ограничений и недостатков. Для его реализации достаточно координат одного исходного пункта. В отличии от способа замыкающих маршрутов дирекционный угол определяется не между исходными и определяемым пунктом, а для конечного положения ЧЭ на маршруте. Также дополнительно выбирается мерный участок - прямой участок маршрута с видимостью между его концами. Для мерного участка определяется его протяженность с применением подвижных ИГС и с применением дальномера.
Реализация заявленного способа предполагает следующую последовательность действий:
- определение с помощью дальномера протяженности оси dМ мерного участка;
- определение с помощью ИГС: приращений координат 
 между исходным и определяемым пунктом; приращений координат
между исходным и определяемым пунктом; приращений координат 
 между начальной и конечной точкой мерного участка; определение дирекционного угла
между начальной и конечной точкой мерного участка; определение дирекционного угла  оси мерного участка; определение конечного дирекционного угла
оси мерного участка; определение конечного дирекционного угла  маршрута;
маршрута;
- определение с помощью гирокомпаса конечного дирекционного угла αK маршрута;
- расчет протяженности оси  мерного участка из данных полученных от ИГС
мерного участка из данных полученных от ИГС
 или
или  или
или 
- расчет дирекционного угла α' оси маршрута и протяженности оси d' маршрута из данных полученных от ИГС путем решения обратной геодезической задачи,

α'=0° при ΔХ>0, ΔY=0,
α'=180° при ΔХ<0, ΔY=0,
α'=90° при ΔХ=0, ΔY>0,
α'=270° при ΔХ=0, ΔY<0;
 или
или  или
или 
- расчет исправленной протяженности оси d маршрута

- расчет исправленных приращений координат между начальным и конечным пунктами маршрута
 и
и 
Полученные приращения координат пунктов и координаты одного исходного (начального) пункта маршрута в сумме дадут координаты конечного пункта маршрута.
Таким образом, заявленный способ позволяет определять координаты пунктов с применением ИГС от одного исходного пункта без использования астрономических наблюдений и сигналов спутниковых радионавигационных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
Изобретение предназначено для определения координат пунктов с применением подвижных бесплатформенных инерциальных геодезических систем (ИГС) при недостаточности исходной геодезической основы, отсутствии видимости небесных тел, отсутствии приема сигналов спутниковых радионавигационных систем. Способ нейтрализации погрешностей подвижных бесплатформенных ИГС включает определение с помощью дальномера протяженности оси dМ мерного участка, определение с помощью ИГС: приращений координат ΔХ', ΔY' между исходным и определяемым пунктом; приращений координат 
 между начальной и конечной точками мерного участка, определение дирекционного угла
между начальной и конечной точками мерного участка, определение дирекционного угла  оси мерного участка, определение конечного дирекционного угла
оси мерного участка, определение конечного дирекционного угла  маршрута, а также определение с помощью гирокомпаса конечного дирекционного угла αK маршрута, расчет протяженности оси
маршрута, а также определение с помощью гирокомпаса конечного дирекционного угла αK маршрута, расчет протяженности оси  мерного участка из данных, полученных от ИГС,
мерного участка из данных, полученных от ИГС,  , или
, или  , или
, или  расчет дирекционного угла α' оси маршрута и протяженности оси d' маршрута из данных, полученных от ИГС, путем решения обратной геодезической задачи, расчет исправленной протяженности оси d маршрута
расчет дирекционного угла α' оси маршрута и протяженности оси d' маршрута из данных, полученных от ИГС, путем решения обратной геодезической задачи, расчет исправленной протяженности оси d маршрута  расчет исправленных приращений координат между начальным и конечным пунктами маршрута
расчет исправленных приращений координат между начальным и конечным пунктами маршрута  и
и  Технический результат применения способа выражается в определении координат пунктов в условиях автономности; в сокращении числа требуемых для реализации способа исходных пунктов до одного; в увеличении допустимой протяженности маршрута между исходным пунктом и определяемым. 1 ил.
Технический результат применения способа выражается в определении координат пунктов в условиях автономности; в сокращении числа требуемых для реализации способа исходных пунктов до одного; в увеличении допустимой протяженности маршрута между исходным пунктом и определяемым. 1 ил.
Способ нейтрализации погрешностей подвижных бесплатформенных инерциальных геодезических систем, включающий:
- определение с помощью дальномера протяженности оси dМ мерного участка;
- определение с помощью инерциальной геодезической системы (ИГС): приращений координат ΔХ', ΔY' между исходным и определяемым пунктами; приращений координат 
 между начальной и конечной точками мерного участка; определение дирекционного угла
между начальной и конечной точками мерного участка; определение дирекционного угла  оси мерного участка; определение конечного дирекционного угла
оси мерного участка; определение конечного дирекционного угла  маршрута;
маршрута;
- определение с помощью гирокомпаса конечного дирекционного угла αK маршрута;
- расчет протяженности оси  мерного участка из данных, полученных от ИГС,
мерного участка из данных, полученных от ИГС,
 , или
, или  , или
, или 
- расчет дирекционного угла α' оси маршрута и протяженности оси d' маршрута из данных, полученных от ИГС, путем решения обратной геодезической задачи;
- расчет исправленной протяженности оси d маршрута

- расчет исправленных приращений координат между начальным и конечным пунктами маршрута
 и
и 
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА) | 2011 |
|
RU2466355C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| US 9239376 B2, 19.01.2016. | |||

