I
Изобретение относится к механизации подъема и транспортирования грузов, а именно к клещевым захватом для транспортирования грузов.
Известен клещевой захват, вьтолненный в виде кулисно-рычажного механизма с направляющими, снабженного рычагами с пальцами, вращающимися вокруг неподвижных осей, укрепленных на звене, вдоль которого перемещается другое звено с прорезями со скользящими в них пальцами рычагов llНедостатком известного клещевого захвата является отсутствие механизма фиксации захватных рычагов-в раскрытом положении.
Известен также клещевой захват, содержащий шарнирно соединенные между собой зажимные рычаги и фиксатор для удержания рычагов в раскрытом положешш 2.
Недостатком известного клещевого захвата является сложность конструкции и ненадежность механизма фиксации захватных рычагов в раскрытом положении.
Целью изобретения является упрощение конструкции.
Эта цель достигается тем, что он снабжен навешиваемой на крюк крана 1 -образной подвеской, имеющей на концах горизонтальной полки пальцы, в верхних концах рычагов выполнены
10 пазы, в которых расположены пальцы, фиксаторы содержат подпружиненные собачки, каждая из которых закреплена на верхнем плече рычага и имеет короткое загнутое и длинное пря15мое плечи, взаимодействующие с пальцами подвески.
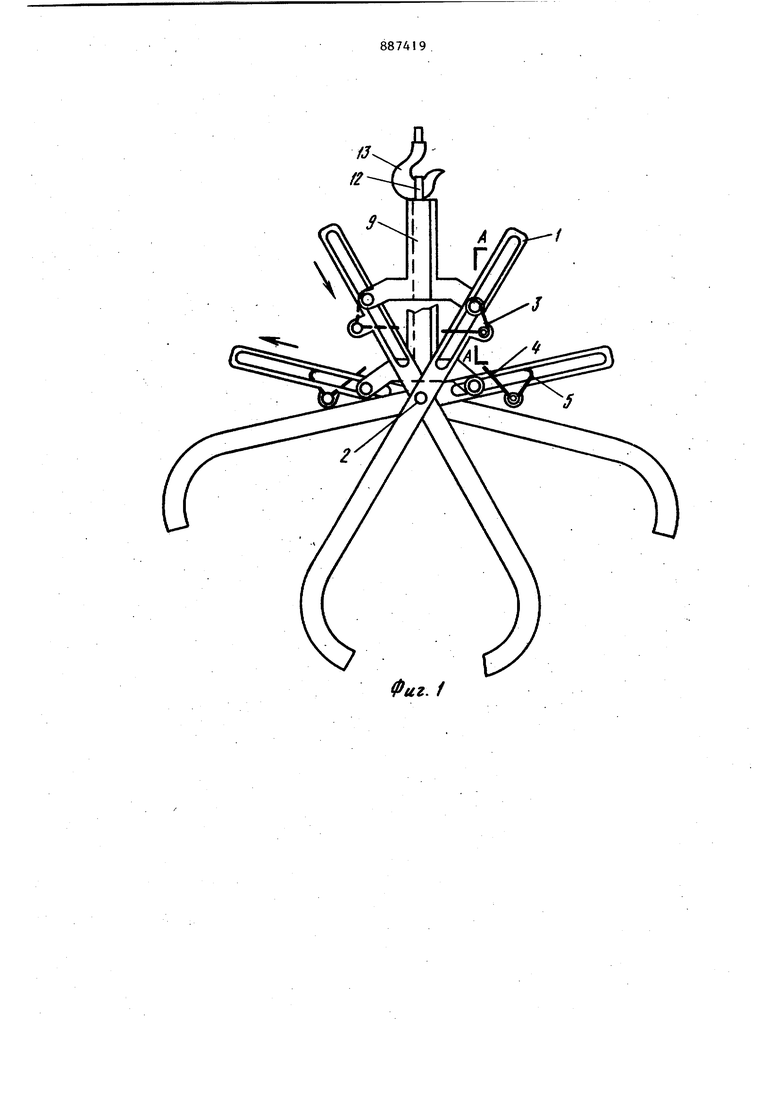
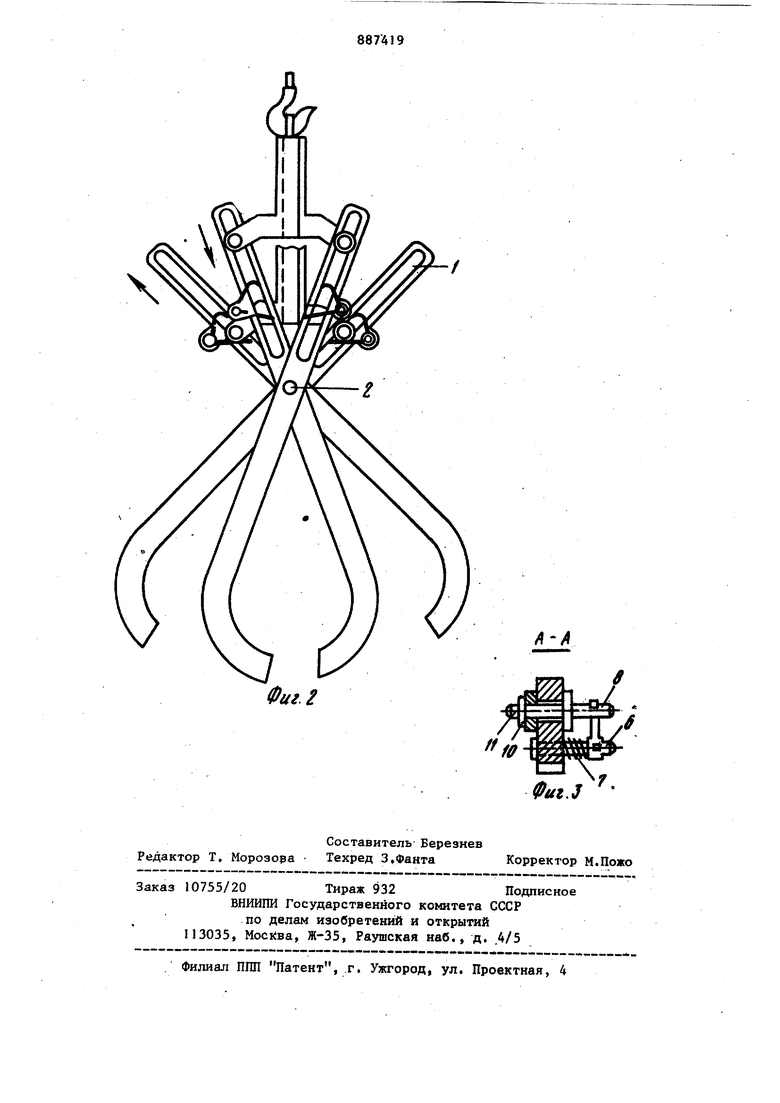
На фиг. 1-2 изображен клещевой захват в четырех рабочих положениях; на фиг. 3 - разрез А-А на фцг, .
20
Автоматический клещевой захват содержит зажимные рычаги 1 с пазами, щарнирно укрепленнь е на оси 2, собачг ки 3, имеющие один удлиненный прямой рычаг 4, другой укороченный загнутый 5. Собачки 3 шарнирно укреплены в приливах верхних концов рычагов с помощью свободно входящих в отверстие приливов осей 6 и пружин 7 защемленных одним концом в приливах рычагов, а другим в бобьшжах собачек 3. Пальцы 8 размещаются и закрепляют ся на концах J.-образной подвески 9 с помощью втулки 10, шплинтов 11 и свободно вводятся в пазы, выполненны в верхних концах рычагов 1. На подвеске 9 жестко еакрепляется серьга 12 для навешивания на крюк 13 грузозахватного устройства. Работа захвата осуществляется сле (дующим образом. Перед опусканием захвата на груз пальцы 8 фиксируются в загнутом рычаге 5. В этом положении захватные рычаги раскрыты. Затем захват опуска ется и нижние рычаги касаются груза, подвеска 9 с Пальцами 8 движется вниз, раздвигая рычаги. Пальцы В про ходят удлиненные прямые рычаги 4 собачек 3, которые затем с помошрью пружин 7 возвращаются в исходное положение. После этого траверса 9 поднимается по пазам рычаговг 1 и пальцы 8, отклоняя рычаг 4 и минуя загнутый рычаг 5, занимают верхне- в пазах положение.-Происходит захват груза нижними концами рычагов 1. Для освобождения груза траверса опускается, пальцы 8 опускаются по прорезям, отклоняют загнутый рычаг 5. В момент нахождения пальцев 8 меж ду рычагами 4 и 5, подвеску 9 поднимают и пальцы 8 входят в зацепление с загнутым рычагом 5. Груз освобожда ется от захвата, при этом рычаги находятся в раскрытом положении. 9,4 . За счет того, что зажимные рычаги в верхней части выполнены с пазами , а механизм фиксации выполнен в виде подпружиненных собачек, размещенных в приливах верхних концов рычагов, с одним удлиненным прямым, а другим укороченным крючковым зубьями, взаимодействующими с пальцами, размещенными на подвеске, упрощается конструкция автоматических клещевых захватов и повьшается надежность механизма фиксации. Формула изобретения Автоматический клещевой захват, содержащий шарнирно соединенные между собой двуплечие рычаги и фиксатор для удержания рычагов в раскрытом положении, отличающи.йся тем, что, с целью упрощения конструкции, он снабжен навешиваемой на крюк крана i-образной подвеской, имеющей на концах горизонтальной полки пальцы, в верхних концах рычагов вьшолнены пазы, в которых расположены пальцы, а фиксаторы содержат подпружиненные собачки., каждая из которых закреплена на верхнем плече рычага и имеет Короткое загнутое и длинное прямое плечи, взаимодействующие с пальцами подвески. Ис точники информации, принятые во внимание при экспертизе 1.Артоболевский И.И. Механизмы в современной технике. Наука, 1970, т. 1, с.125. 2.Авторское свидетельство СССР N442138, кл. В 66 С 1/44, 1971 (прототип) ..
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство для группы грузов | 1983 |
|
SU1221166A1 |
| Захватное устройство для ступенчатых цилиндрических грузов | 1990 |
|
SU1766823A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Клещевой захват | 1982 |
|
SU1054272A1 |
| Клещевой захват | 1987 |
|
SU1418263A1 |
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Захват-кантователь | 1982 |
|
SU1052468A1 |
| Клещевой захват | 1982 |
|
SU1079596A1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 1970 |
|
SU276361A1 |