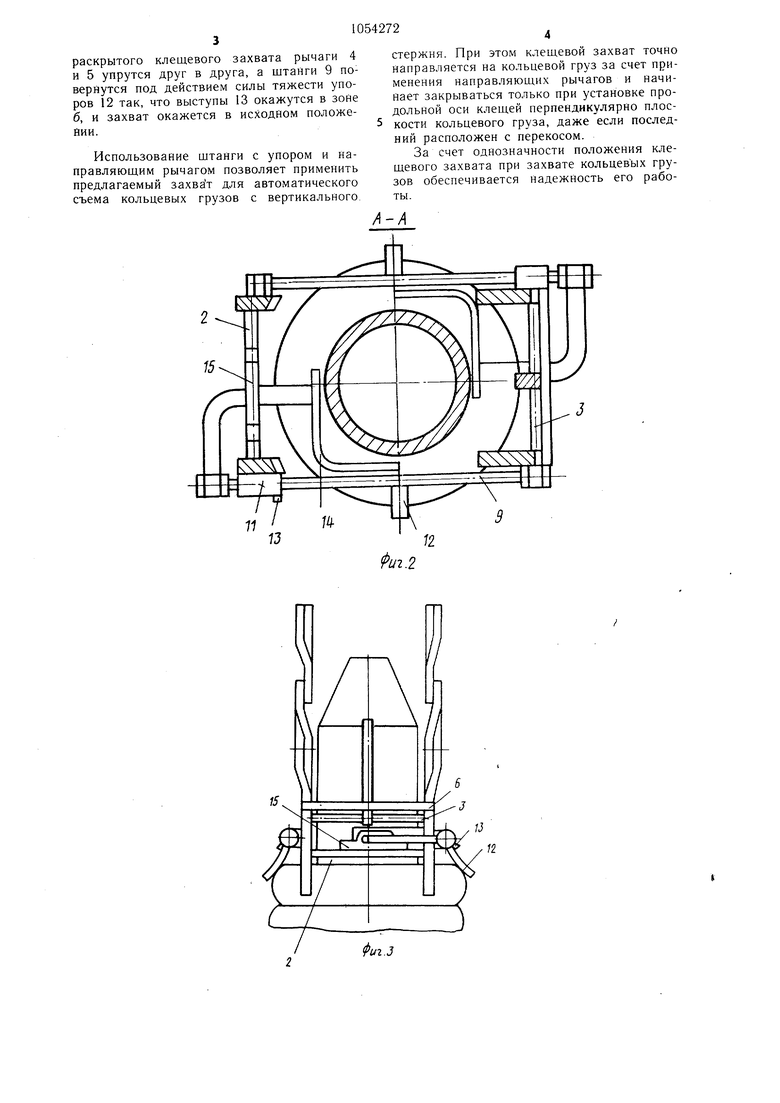
Изобретение относится к подъемно-транспортному машиностроению, в частности к клещевым захватам, преимущественно для кольцевых грузов, размещенных на вертикальном стержне. Известен клещевой захват, содержащий навещиваемые на крюк грузоподъемного механизма захватные лапы и механизм фиксации захватных лап в раскрытом положении 1. Известное устройство предназначено для захвата длинномерных деталей. С его помощью можно также снимать кольцевые грузы (бунты проволоки, покрыщки автомобилей и т. п.) с вертикальных стержней, но в этом случае оно будет работать йенадежно, так как грузы располагаются на разных уровнях, а в известном захвате невзаимодейстуравновещенное коромысло вует с упором, установленным на одном постоянном уровне, и поэтому захват будет срабатывать на одном постоянном уровне; кольцевые грузы могут лежать с перекосом относительно друг друга, тогда устройство Не может их захватить. Целью изобретения является повышение надежности работы клещевого захвата при съеме кольцевых грузов с вертикальных стержней. Указанная цель достигается тем, что клещевой захват, преимущественно для кольцевых грузов, размещенных на вертикальном стержне, содержащий навешиваемые на крюк грузоподъемного механизма захватные лапы и механизм фиксации захватных лап в раскрытом положении, снабжен установленной на захватных лапах горизонтальной штангой, закрепленными на последней упором для взаимодействия с грузом и направляющими для взаимодействия с вертикальным стержнем и размещенным на одной из захватных лап фиксатором щтанги, при этом механизм фиксации захватных лап в раскрытом положении включает в себя рычаги, соединенные кинематически одни.ми концами с захватными лапами с возможностью взаимодействия свободными концами друг с другом. На фиг. 1 показан клещевой захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - клещевой захват, вид сбоку; на фиг. 4 - узел 1 на фиг. 1; На фиг. 5 - то же, в раскрытом положении; на фиг. 6 - клещевой захват с захваченным кольцевым грузом. Клещевой захват содержит пару захватных лап 1, соединенных между собой тягами 2 и 3, и механизм фиксации раскрытия клещевого захвата, состоящий из рычагов 4 и 5, закрепленных с возможностью поворота на тягах 3. Поворот рычагов 4 и 5 ограничивается упорами 6. На каждой клепгевой лапе на клещевинах 7 и 8 установлена щтайга 9. К клещевине 7 щтанга 9 присоединяется через проущину 10, а к клещевине 8 - через фиксатор 11 с фигурным пазом а. Штанга 9 имеет возможность поворота в проушине 10 и в фиксаторе 11, а также продольного перемещения в фиксаторе 11. Кроме того, на штанге 9 жестко закреплены упор 12 и выступ 13, взаимодействующий с фигурным пазом а, и установлен с возможностью поворота относительно штанги 9 направляющий рычаг 14, приче.м направляющий рычаг 14 также имеет возможность продольного перемещения в проущине 15, расположенной на тяге 2. Клещевой захват работает следующим образом. В исходном положении клещевой захват раскрыт (фиг. 5). Рычаги 4 и 5 механизма фиксации раскрытия клещевого захвата опущены, упираются друг в друга и в упоры 6. Выступ 13 На штангах 9 Находится вне фиксаторов 11, справа от них, а упоры 12 под действием силы тяжести опущены вниз. При опускании клещевого захвата на вертикальный стержень 16 с кольцевым грузом вертикальный стержень 16 проходит между направляющими рычагами 14 и поднимает рычаги 4 и 5, при этом клещевой захват сжимается на величину зазора между выступом 13 и фиксатором 11, выступы 13 упираются в зону б фиксаторов 11 и клещевой захват остается в раскрытом положении. При дальнейшем опускании клещевого захвата клещи заходят на кольцевой груз, в него упираются упоры 12 (фиг. 3), а так как клещевой захват продолжает опускаться, упоры 12 поворачиваются и поворачивают штанги 9 до совпадения выступов 13 с пазами а на фиксаторах 11. Клешевой захват начнет закрываться только тогда, когда у обоих клещей выступы 13 зайдут в пазы на фиксаторах 11, при этом обе штанги 9 прижаты к кольцевому грузу, поэтому продольная ось клещевого захвата располагается перпендикулярно плоскости кольцевого груза. При закрывании захват действует как обычные клещи, а при подъеме захватывает кольцевой груз 17. После схода клещевого захвата с вертикального стержня рычаги 4 и 5 свободно опускаются вниз и располагаются так, как показано на фиг. 6. Клещевой захват перемещается к заданному месту и опускается на поддон. В момент касания поддона кольцевым грузом захват под действием собственного веса раскрывается, при этом штанги 9 перемещаются в фиксаторах И, и выступы 13 выходят из пазов, но , поворачиваться в зону б не смогут, так как этому препятствуют упоры 12, упирающиеся в кольцевой груз 17. Клещевой захват должен раскрываться до тех пор, пока рычаги 4 и 5 не опустятся до положения фиксации раскрытия захвата (фиг. 5). При подъеме
раскрытого клещевого захвата рычаги 4 и 5 упрутся друг в друга, а штанги 9 повернутся под действием силы тяжести упоров 12 так, что выступы 13 окажутся в зоне б, и захват окажется в исходном положении.
Использование штанги с упором и направляющим рычагом позволяет применить предлагаемый захват для автоматического съема кольцевых грузов с вертикального
стержня. При этом к„1ещевой захват точно направляется на кольцевой груз за счет применения направляющих рычагов и начинает закрываться только при установке продольной оси клещей перпендикулярно плоскости кольцевого груза, даже если последний расположен с перекосом.
За счет однозначности положения клещевого захвата при захвате кольцевь1х грузов обеспечивается надежность его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1983 |
|
SU1164194A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1203004A1 |
| Захват-кантователь | 1982 |
|
SU1052468A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Механизм фиксации клещевин захватного устройства | 1990 |
|
SU1729993A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Захват клещевой для труб | 2024 |
|
RU2828512C1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |

КЛЕЩЕВОЙ ЗАХВАТ преимущественно для кольцевых грузов, размещенных на вертикальном стержне, содержащий Навешиваемые на крюк грузоподъемного механизма захватные лапы и механизм фиксации захватных лап в раскры16 том положении, отличающийся тем, что, с целью повыщения надежности, он снабжен установленной на захватных лапах горизонтальной штангой, закрепленными на последней упором для взаимодействия с грузом и направляющими для взаимодействия с вертикальным стержнем и размещенным на одной из захватных лап фиксатором штанги, при этом механизм фиксации захватных лап в раскрытом положении включает в себя рычаги, соединенные кинематически одними концами с захватными лапами с возможностью взаимодействия свободными концами друг с другом. (Л с: о 01 N ю / /7 Фиг.1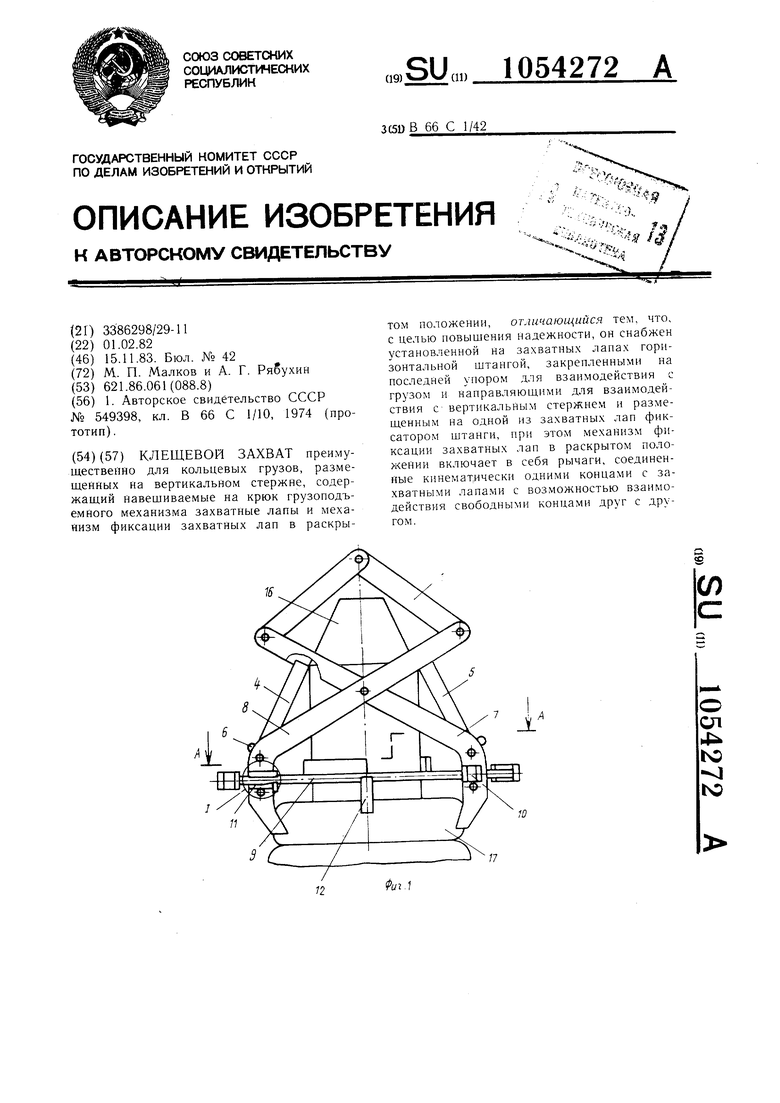
Фи1.5
игб
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузозахватное устройство для автоматической загрузки длинномерных деталей | 1974 |
|
SU549398A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
