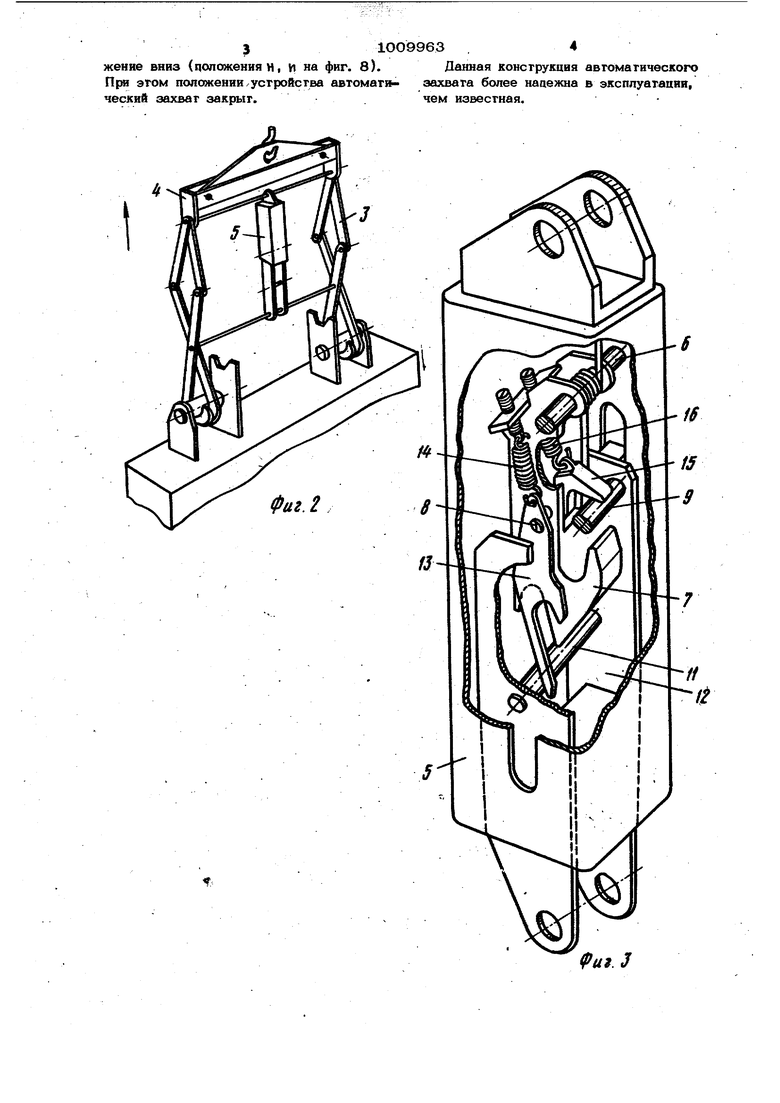
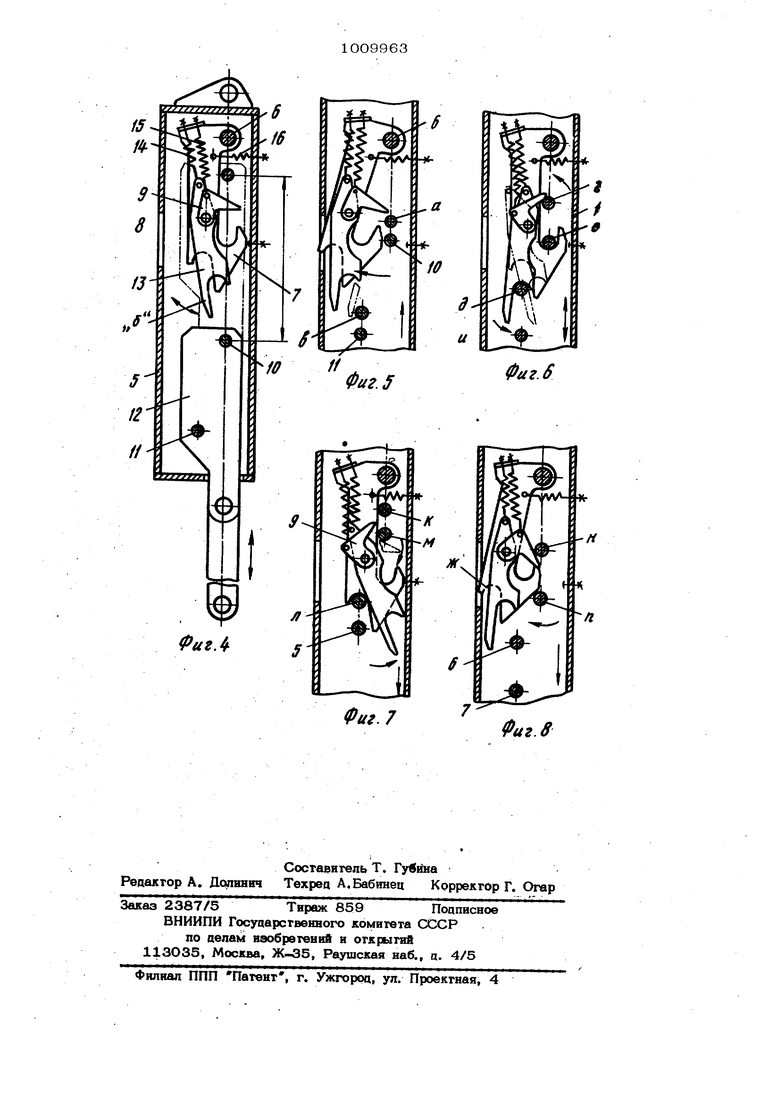
Изобрэгение огнсюигся к грузозахватным усгроЙЬгвам. Известен автоматический захват, соаержаший траверсу с шарнирно закреплен ными на ней захватными рьпагамк, шар нирно соединенными посреастврм тяг с навешиваемой на кркж грузоподъемной машины верхней траверсой, и механизм фиксации захватных рычагов в рабкрьстом положении, включающий в себя аше{репленные на нижней траве юе стойки, соединенные пальцем, поворотный крюк, установленный с возможностью взаимоде ствия с пальцем, и шарнирно закреплен ную на крюке посредством оси собачку для перекрытия зева крюка С l Однако данный захват недостаточно надежен в работе из-за возможности проскакивания пальца мимо зева крюка. Цель изобретения - повышение надежности. Цель достигается тем, что автоматийеский захват, содержащий нижнюю траверсу с шарнирно закрепленными на ней захватными рычагами, шарни|И1о запреталенными посредством тяг с навешиваемо на крюк грузоподъемной машины верхней траверсой, и механизм фиксации захват ных рычагов в раскрытом положении, включающий в себя закрепленные на ниж ней траверсе стойки, соединенные палыцем. Поворотный крюк, установленный с возможностью взаимодействия с пальцем и шарнирно закрепленную на крюке посредством оси собачку для перекрытия зе крюка, снабжен закрепленным на стойках дополнительным пальцем и свободно уста новленными на упомянутой оси подружи- ненным двуплечим рычагом, при этом в нижнем плече рычага и в нижней части крюка выполнены вырезы для дополнител ного пальца, нижнее плечо рычага распо ложено ниже части крюка, а собачка под пружинена. Такое выполнение автоматического .захвата повьш1ает его надежность по сравнению с известным. На фиг. 1 изображен автоматический захват в момент установки его на груз, общий вид; на фиг. 2 - то же, в момент захвата груза; на фиг. 3 - механизм фи сации захватных рычаго1в в положении ,р изометрви; на фиг. 4 - то же в момент захвата груза, в разрезе; на фиг. 5 - то же, в момент поворота крюка пальцем; на фиг. 6 - то же, в момент захода пальца в зев крюка; на фиг. 7 - то же, в момент выхода пальца из зева крюка; на фиг, 8 - то же, в момент выхода пальца из зоны действия крюка. Автомагический захват содержит нижнюю траверсу 1 с шарнирно закрепленными на ней захватными рычагами 2, шарнирно соединенными посредством тяг 3 с навешиваемой на крюк грузоподъемной машины верхней траверсой 4. Механизм фиксации захватньгх рычагов в раскрытом положении включает в себя корпус 5 с осью 6, на которой свободно установлен крюк 7 с осью 8, расположенную на оси 8 крюка подпружиненную собачку 9, основной и дополнительный пальцы Ю и 11, соединяющие стойки 12, двуплечий рычаг 13, свободно установленный на оси 8 крюка, и пружины l4, 15 и 16, соединяющие корпус соответственно с двуплечим рычагом, собачкой и крюком. Автоматический захват работает следующим образом. При перемещении стоек 12 в корпусе 5 вверх палец 10, надвигаясь на скос Kpioка 7, откидывает его, при этом попадании пальца 1О в промежуток между крюком 7 и собачкой 9 (положение а на фиг, 5) палец 11 оказываегея справа пой вырезом двуплечего рычага 13 (положение Ь на фиг. 5). Далее при перемещении стоек вверх палец 10 откидывает собачку 9 (положение 2 на фиг. б), а палец 11 упирается в вырез двуплечего рычага 13 (положение д на фиг. 6). Происходит останов перемещения стоек. При перемещении стоек гаиз палец 1О попадает в зев крюка 7 (положение в на фиг. б), при этом освобожденное плечо двуплечего рычага 13 встает в исходное положение по отношению к крюку 7 под действием пружины 14, а палец 11 оказывается слева от двуплечего рычага под вырезом U. крюка 7 (положение Ж на фиг. 6). В этом положении устрс ства автоматический захват раскрыт. Самоотцеп происходит при перемещении стоек 12 вверх, палец 10 откидьюает собачку 9 и проходит ее (положение К на фиг. 7), собачка 9 встает в исходное положение под действием пружины 15. Палеа 11 упирается в вырез X крюка 7 и ограничивает перемещение стоек вверх (положение Л НА фиг. 7), затем при перемещении стоек вниз палец 10 оказывает воздействие на собачку 9 (поло жение )«д на фиг. 7), при этом собачка 9 закрьюает зев крюка 7 и продолжает дви31О09963 ,4
жение вниз (цопожениян, П на фиг. 8).Данная конструкция авгоматического
эгом положении устройсгва автомаг - захвата более надежна в эксплуатации, ческнй захват закрыт..чем известная.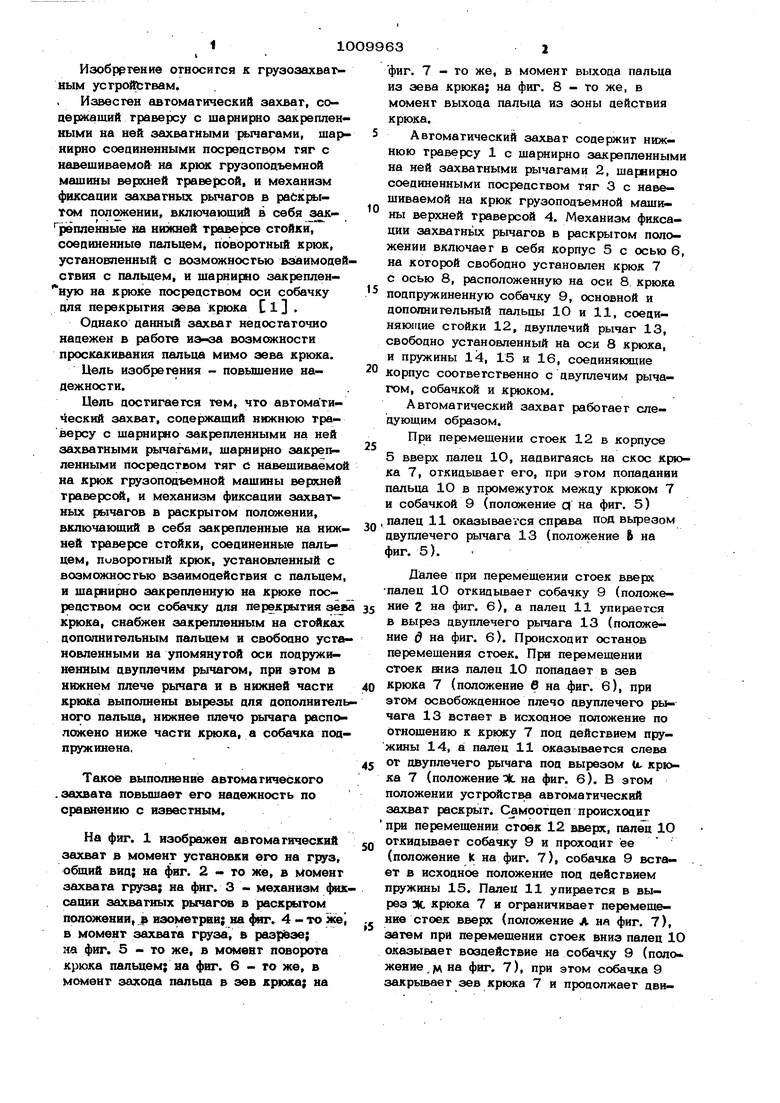
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| Клещевой захват | 1987 |
|
SU1418263A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| Автоматический торцовый захват для ряда цилиндрических изделий разного диаметра | 1985 |
|
SU1430335A1 |
АВТОМАТИЧЕСКИЙ ЗАХВАТ, соаержаший нижнюю траверсу с шарнирно закрепленными на ней захватными рычагами, шарнирно соединенными посредством тяг с навешиваемой на крюк грузоподъемной машины верхней траверсой, и механизм фиксации захватных рычагов в раскрытом положении, включаюший в себ закрепленные на нижней тр&версе стойки, соединенные пальиеь, поворотный крюк, установленный с возможностью взаимодействия с пальцем, и шарнирно закрепленную на крюке посредством оси собачку для перекрытия зева крюка, о г л и чаюшийся тем, что, с целью повьш ения надежности его в работе, захват снабжен 3 1крепленным«. на стойках дополнительным пальцем и свободно установленным на оси подпружиненным двуплечим рычагс «, при этом в нижнем плече я 1чага и в нижней части крюка выпапне- ны вырезы для дополнительного пальца, нижнее плечо рычага расположено ниже нижней части крюка, а собачка подпружинена. uz.f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический захват | 1974 |
|
SU622744A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
