Изобретение относится к грузоподъемным механизмам, а именно к грузозахватным устройствам для транспортировки группы грузов.
Цель изобретения - повышение надеж- ности.
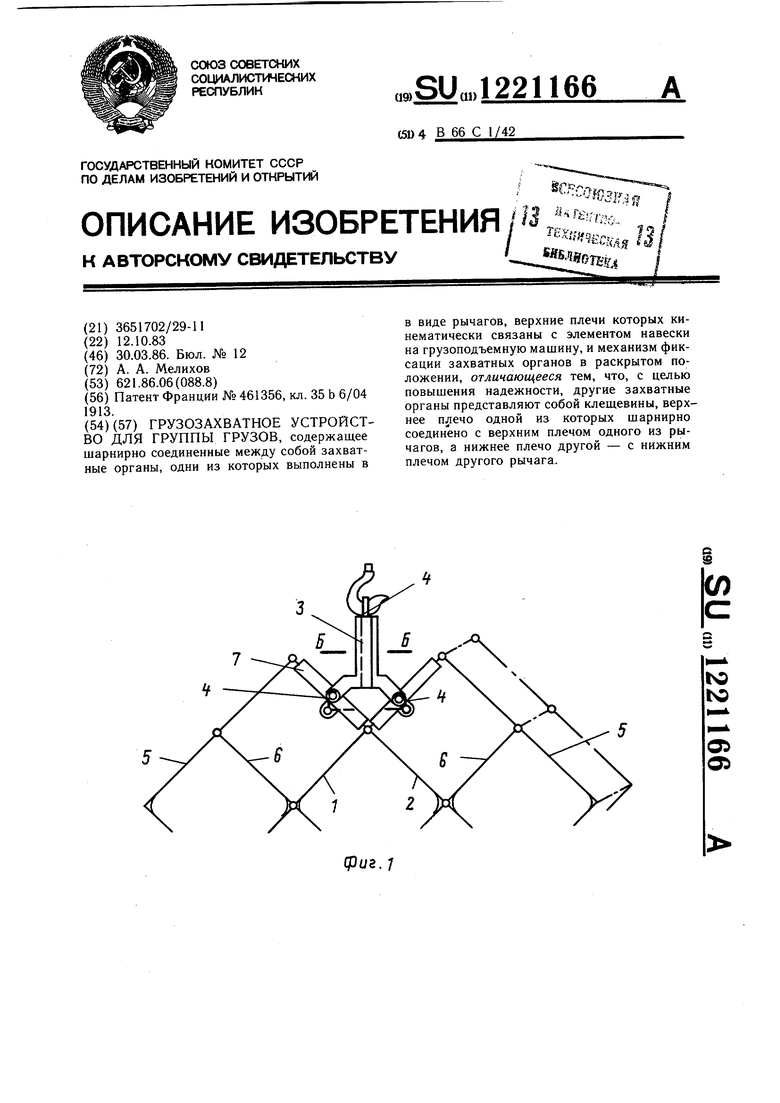
На фиг. 1 изображено устройство для группы грузов, общий вид; на фиг. 2 - ме- ханнзм фиксации при раскрытом положении захватных рычагов; на фиг. 3 - то же, при сведенном положении захватных рычагов; на фиг. 4 - сечение А-А на фиг. 2; на фиг. 5 - сечение Б-Б на фиг. 1.
Грузозахватное устройство содержит шар нирно соединенные между собой захватные органы, одни из которых выполнены в виде рычагов 1 и 2. Верхние плечи этих рычагов кинематически связаны с помощью траверсы 3 с элементом навески 4 на грузоподъемную машину. Устройство содержит механизм фиксации захватных органов в рас крытом положении. К рычагам 1 присоединены другие захватные органы, представляющие собой клещевины 5 и 6. Верхние плечи клещевин 5 шарнирно соединены с верхними плечами рычагов 1 и 2, а нижние плечи клещевин 6 - с нижними плечами рычагов 1 и 2.
Верхние плечи рычагов 1 и 2 имеют пазы 7 для размещения в них пальцев 8 механизма фиксации, которые закреплены на траверсе 3 с помощью втулок 9 и шплинтов 10. Пальцы 8 взаимодействуют с собачками И. Собачки 11 выполнены в виде двуплечих ры
чагов, которые имеют одни удлиненные прямые, а другие укороченные загнутые плечи и крепятся посредством осей 12 и пружин 13.
Захватное устройство работает следующим образом.
Перед опусканием грузозахватного устройства на груз пальцы 8 фиксируются в загнутом укороченном плече собачки 11. В этом положении захватные органы раскрыты (фиг. 2).
Затем устройство опускается и нижние плечи рычагов 1 и 2 и клещевин 5 и 6 касаются груза. Травеса 3 с пальцами 8 движется вниз, раздвигая рычаги 1 и 2. Пальцы 8 проходят удлиненные прямые плечи собачек 11, которые затем с помощью пружин 13 возвращаются в исходное положение. После этого траверса 3 поднимается до пазам рычагов 1, и пальцы 8, отклоняя удлиненные прямые и минуя укороченные загнутые плечи собачек 11, занимают верхнее в пазах 7 положение (фиг. 3). Происходит захват груза. Для освобождения груза траверса 3 опускается, пальцы 8 опускаются по пазам 7, отклоняют загнутые укороченные плечи собачек 11. В момент нахождения пальцев 8 между удлиненными прямыми и укороченными загнутыми плечами собачек 11 траверсу 3 поднимают и пальцы 8 входят в зацепление с загнутыми плечами собачек 11. Группа грузов освобождается от грузозахватного устройства, при этом захватные органы зафиксированы в раскрытом положении.
(pus. 2
(риг.З
А-А
фиг.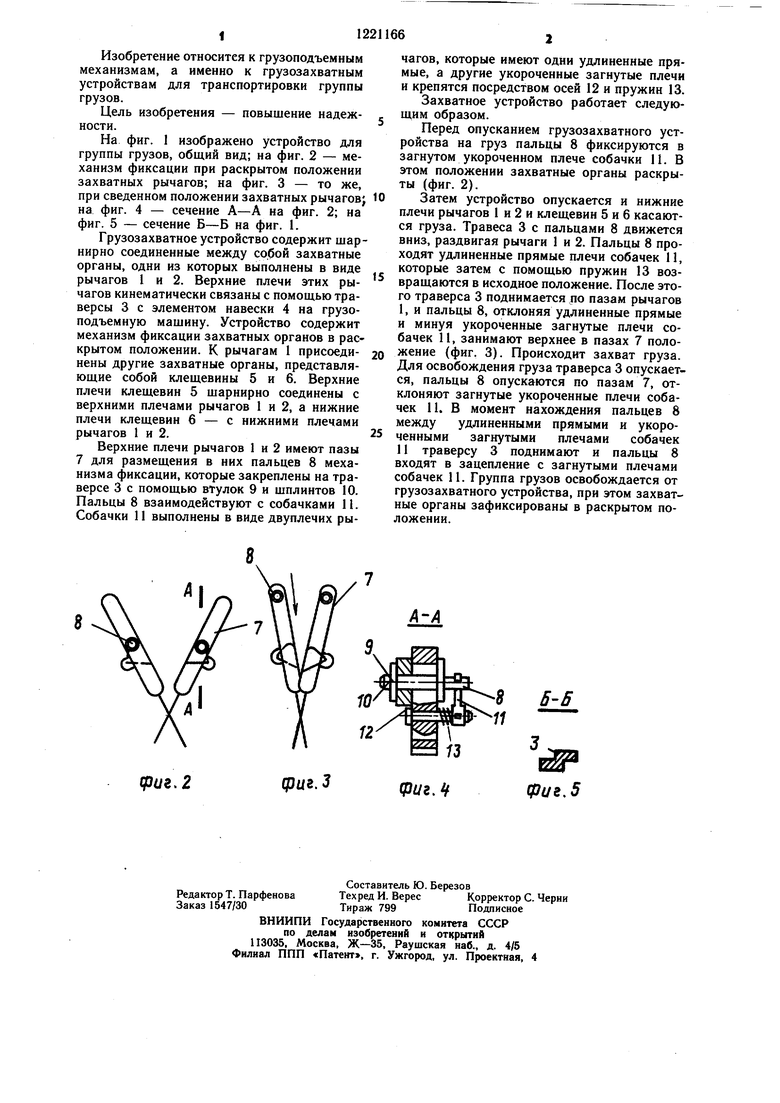
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический клещевой захват | 1979 |
|
SU887419A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| Захват клещевой для труб | 2024 |
|
RU2828512C1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1982 |
|
SU1126525A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Аттенюатор к ультразвуковому дефектоскопу | 1973 |
|
SU461356A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
