Изобретение относится к грузоподъемным устройствам, предназначенным, в частности, для захвата и кантования тежеловес- нь1х грузов, например рулонов листовой стали.
Цель изобретения - повышение удобства в эксплуатации.
На фиг. 1 показан захват-кантователь в момент наведения на груз, общий вид; на фиг. 2 - то же, в момент окончания процесса кантования груза; на фиг. 3 - вид Аю на фиг. 1; на фиг. 4 - вид Б на фиг. 2.
Захват-кантователь содержит раму 1, на которой жестко закреплены Тидроаккумуля- тор 2 и вертикальный гидроцилиндр 3, выполненный с поршнями 4 и 5. При этом
ствием собственной массы опускается. Одновременно рабочая жидкость из штоковой полости 19 гидроцилиндра 3 через трубопровод 20 и открытый электромагнитный клапан 21 вытесняется в полость 22 гидроаккумулятора 2, поршень 23 которого, перемещаясь, сжимает пружину 24. В результате этого захватные рычаги 12 посредством тяг 11 поворачиваются и сближаются, осуществляя своими зажимными губками 16 предварительный зажим груза 17. Затем по мере подъема усилие зажима под действием массы груза 17 возрастает за счет дальнейшего вытеснения рабочей жидкости из штоковой полости 19 гидроцилиндра 3 в полость 22 гидроаккумулятора 2. После подъшток 6 поршня 4 снабжен элементом на- ема груза 17 на требуемую высоту электромагнитный клапан 21 закрывают.
Для кантования груза 17 открывают посредством электрической команды электромагнитный клапан 27. При этом под дейвески 7 на крюк грузоподъемной машины и смонтирован подвижно в канале а, выполненном в полом штоке 8 поршня 5. На штоке 8 установлена с возможностью фиксированного перемещения по высоте втул-JQ ствием массы груза 17 и захвата канто- ка 9, закрепленная в требуемом положении, вателя рабочая жидкость из межпоршневой например, болтом 10 и шарнирно соединен- полости 26 гидроцилиндра 3 поступает че- ная посредством тяг 11 с захватными ры- рез открытый электромагнитный клапан 27 чагами 12. Последние шарнирно закреплены и напорные рукава 28 в поршневые полос- на раме 1 и снабжены гидроцилиндрами ти 29 гидроцилиндров 13 поворота, штоки 14 13 поворота, щтоки 14 которых подпружи-25 которых, поступательно перемещаясь, сжима- нены пружинами 15 и шарнирно связаны с зажимными губками 16, для удержания груза 17. Зажимные губки 16 установлены с возможностью поворота вокруг своих осей 18.
ют пружины 15 и производят поворот вокруг осей 18 зажимных губок 16 вместе с грузом 17. После кантования на требуемый угол электромагнитный клапан 27 закрывают груз 17 устанавливают на место хранения
В связи с тем, что открытые складские или транспортное средство и переводят
электромагнитный клапан 21 в открытое положение. В результате этого рабочая жидкость из полости 22 гидроаккумулятора 2 поступает в полость 19 гидроцилиндра 3, поршни 4 и 5 со штоками 6 и 8 перемещаются вниз, и захватные рычаги 12 посредством втулки 9 и тяг 11 раздвигаются, освобождая таким образом груз 17. Од- новременно дальнейшим опусканием захвата-кантователя до упора его гидроцилиндра 3
площади выполняют с уклонами для отвода дождевых и талых вод, угол а между крайними положениями шарнирного соединения штока 14 с зажимной губкой 16 выбран равным 100-110°, причем ось этого щарнир- ного соединения смещена по вертикали и горизонтали относительно оси 18 поворота зажимной губки 16.
35
Для управления работой устройства
штоковая полость 19 гидроцилиндра 3 через до или захватных рычагов 12 в верхнюю по- трубопровод 20 и перекрывающий электро- верхность груза 17 или в поверхность, на магнитный клапан 21 подключена к полости
которую опирается груз 17, соответственно, захватные рычаги 12 приводят в исходное разведенное положение и закрывают электромагнитный клапан 21.
22 гидроаккумулятора 2, поршень 23 которого снабжен пружиной 24 с регулировочным винтом 25, а межпоршневая полость 26 гидроцилиндра 3 посредством перекры- вающего электромагнитного клапана 27 и трубопроводов (напорных рукавов) 28 соединена с поршневыми полостями 29 гидроцилид- ров 13 поворота.
Устройство работает следующим образом.
Захват-кантователь с помощью грузоподъемной машины ориентируют над грузом 17 и подают электрическую команду на открывание электромагнитного клапана 21. При этом порщни 4 и 5 со штоками 6 и 8, втул- кой 9 и элементом навески 7 остаются не- подвижньши, а рама 1 с закрепленными на ней гидроаккумулятором 5, захватными рычагами 12 и гидроцилиндром 3 под дей
ствием собственной массы опускается. Одновременно рабочая жидкость из штоковой полости 19 гидроцилиндра 3 через трубопровод 20 и открытый электромагнитный клапан 21 вытесняется в полость 22 гидроаккумулятора 2, поршень 23 которого, перемещаясь, сжимает пружину 24. В результате этого захватные рычаги 12 посредством тяг 11 поворачиваются и сближаются, осуществляя своими зажимными губками 16 предварительный зажим груза 17. Затем по мере подъема усилие зажима под действием массы груза 17 возрастает за счет дальнейшего вытеснения рабочей жидкости из штоковой полости 19 гидроцилиндра 3 в полость 22 гидроаккумулятора 2. После подъема груза 17 на требуемую высоту электема груза 17 на требуемую высоту электромагнитный клапан 21 закрывают.
Для кантования груза 17 открывают посредством электрической команды электромагнитный клапан 27. При этом под действием массы груза 17 и захвата канто- вателя рабочая жидкость из межпоршневой полости 26 гидроцилиндра 3 поступает че- рез открытый электромагнитный клапан 27 и напорные рукава 28 в поршневые полос- ти 29 гидроцилиндров 13 поворота, штоки 14 которых, поступательно перемещаясь, сжима-
ствием массы груза 17 и захвата канто- вателя рабочая жидкость из межпоршневой полости 26 гидроцилиндра 3 поступает че- рез открытый электромагнитный клапан 27 и напорные рукава 28 в поршневые полос- ти 29 гидроцилиндров 13 поворота, штоки 14 которых, поступательно перемещаясь, сжима-
ют пружины 15 и производят поворот вокруг осей 18 зажимных губок 16 вместе с грузом 17. После кантования на требуемый угол электромагнитный клапан 27 закрывают груз 17 устанавливают на место хранения
или транспортное средство и переводят
или захватных рычагов 12 в верхнюю по- верхность груза 17 или в поверхность, на
которую опирается груз 17, соответственно, захватные рычаги 12 приводят в исходное разведенное положение и закрывают электромагнитный клапан 21.
Затем при подъеме захват-кантователя переводят электромагнитный клапан 27 в открытое положение, вследствие чего зажимные губки 16 поворачиваются в исходное положение штоками 14 под действием пру- жин 15, а рабочая жидкость, поступая из полостей 29 гидроцилиндров 13 через напорные рукава 28 и открытый электромагнитный клапан 27 в межпоршневую полость 26 гидроцилиндра 3, приводит в исходное нижнее положение поршень 4 со штоком 6. После поворота зажимных губок 16 в исходное положение электромагнитный клапан 27 устанавливают в закрытое положение и устройство готово для следующего цикла работы.
12
20
25
17
В ид А
16
(риг. 2
фуг. J
8 ид 5
Редактор Т. Парфенова Заказ 1547/30
Составитель Т. Губина
Техред И. ВересКорректор А. Зимокосов
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4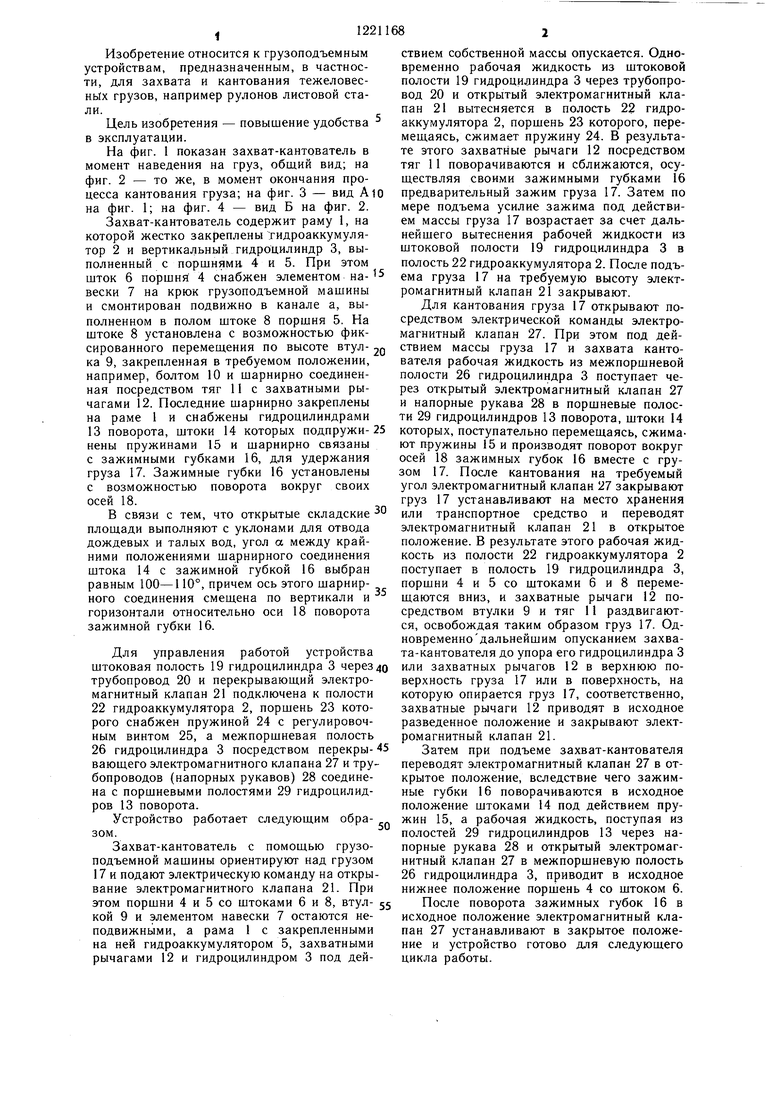
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1980 |
|
SU922032A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| Рычажный кантователь | 1987 |
|
SU1418024A1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| Кантователь | 1975 |
|
SU603559A1 |
| Привод рабочих органов лесозаготовительной машины | 1989 |
|
SU1652703A2 |
| Привод захвата-кантователя | 1981 |
|
SU1030297A1 |
| Траверса для кантования грузов | 1989 |
|
SU1703601A1 |
| Захват-кантователь | 1985 |
|
SU1341143A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |

| Авторское свидетельство СССР № 914470, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
