1
Изобретение относится к подъемно-транспортному оборудованию, в частности к захватам-кантователям.
Цель изобретения - улучшение эксплуатационных характеристик.
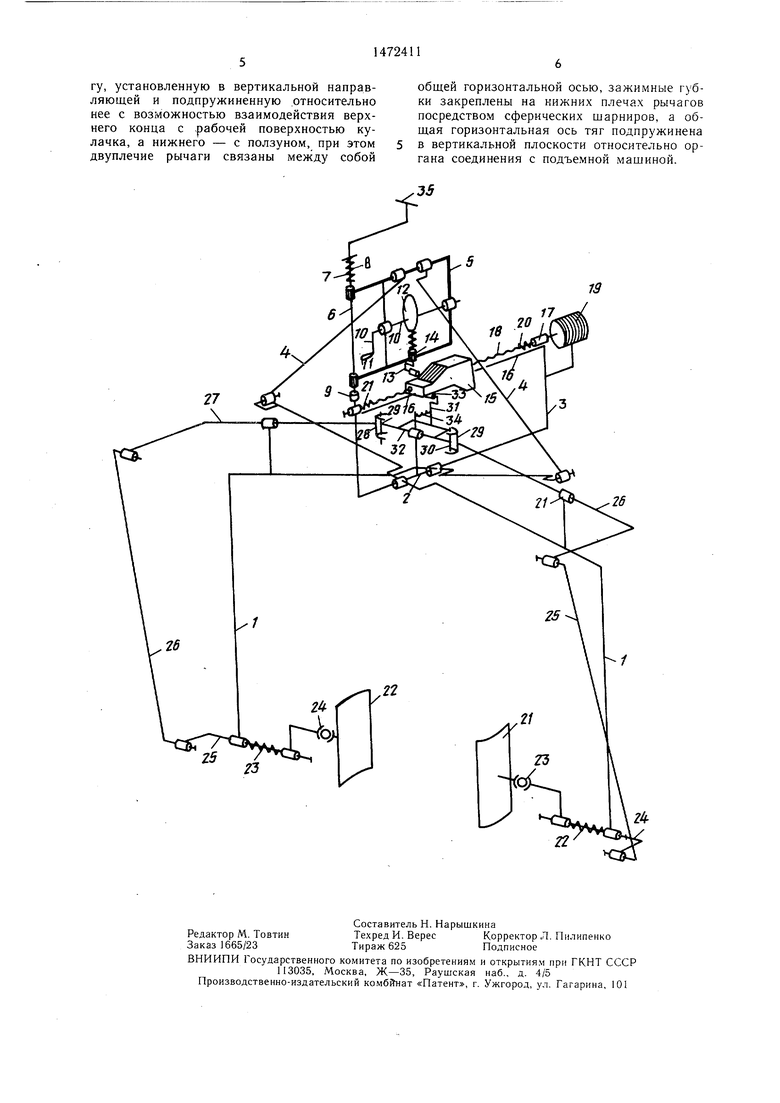
На чертеже показана кинематическая схема захвата-кантователя.
Захват-кантователь содержит двуплечие рычаги 1, которые могут поворачиваться относительно общей горизонтальной оси 2, жестко связанной с рамой 3. С двуплечими рычагами 1 шарнирно связаны тяги 4, вторые концы которых шарнирно связаны обшей горизонтальной осью 5, являющейся стороной приводной рамы 6. Приводная рама 6 может перемещаться в вертикальном направлении, по вертикальной на- правляющей 7, жестко связанной с рамой 3, причем сверху приводная рама 6 подпружинена пружиной 8, а ход приводной рамы 6 вниз ограничен упором 9. На приводной раме 6 установлена с возможностью поворота относительно собственной оси регулировочная планка 10, на которой жестко укреплены рукоятка 11 и кулачок 12. В контакте с кулачком 12 находится штанга 13, которая может смещаться в вертикальном направлении на вертикальной направляющей 14. Под щтангой 13 находится фигурный привод ползун 15, который может перемещаться в горизонтальной плоскости по горизонтальной направляющей 16, при помощи жестко связанной с ним гайки 17, находящейся в зацеплении с винтом 18. Винт 18 жестко связан с валом приводного двигателя 19, установленного на раме 3, причем концы винта лишены нарезки и снабжены возвратными пружинами 20 и 21. Приводной ползун 15 имеет две поверхности - верхнюю и нижнюю.
Механизм кантования содержит зажимные губки 22, которые с помощью подпружиненных пружинами 23 сферических шарниров 24 связаны с поворотными осями 25, укрепленными с возможностью поворота в двуплечих рычагах 1. Поворотные оси 25 шарнирно связаны с рычагами 26, вторые концы которых шapriиpнo связаны с ведущими осями 27. На сходящихся концах ведущих осей 27, укрепленных с возможностью поворота в направляющих 28, жестко связанных с двуплечими рычагами 1, расположены вилки 29, охватывающие стержни 30. Стержни 30 жестко связаны
(Л
4:
ю
4
с поворотным толкателем 31, который может поворачиваться относительно оси 32, укрепленной на раме 3. Ролик 33 поворотного толкателя 31 находится в постоянном контакте с нижней рабочей поверхностью приводного ползуна 15, благодаря наличию пружины 34. Захват-кантователь крепится к подъемной машине-манипулятору с помощью органа соединения 35.
Перед началом работы захват-кантователь регулируют на нужный диаметр гру за с помощью поворота регулировочной планки 10, а следовательно, и кулачка 12. Очевидно, что поворот кулачка 12 сопровождается вертикальным перемещением штанги 13, вследствие чего изменяется расстояние по горизонтали между концом штанги 13 и поверхностью приводного ползуна 15. Таким образом, если обозначить величину перемещения приводного ползуна 15 влево до начала контакта его рабочей поверхности со штангой 13 как 1-, а величину перемещения от начала контакта до выхода ролика толкателя на горизонтальную часть рабочей поверхности кулачка 14 как If, то очевидно, что чем больше величина 1р, тем на большую величину сместится вверх приводная рама 5 из своего исходного положения, в котором ее удерживает пружина 8. Это значит, что на большую величину сойдутся двуплечие рычаги 1 из своего начального, полностью открытого положения, т. е. положения, в котором они разведены на максимально возможную величину.
В начальном положении двуплечие рычаги 1, а следовательно, и зажимные губки 22 находятся в максимально разведенном положении, которое определяется установкой упора 9, в который упирается приводная рама 6, под действием пружины 8. После наведения захватного устройства на груз, перед включением двигателя 19, приводной ползун 15 находится в крайнем правом положении. При этом ролик 33 поворотного толкателя 31 находится в исходном положении, т. е. контактирует с горизонтальной частью нижней рабочей поверхности приводного ползуна 15. Конец штанги 13 также находится над горизонтальной частью верхней поверхности ползуна 15 (в зависимости от положения приводного кулачка 12, конец штанги 13 может касаться, а может и не касаться этой поверхности). После включения двигателя 19, вращающего винт 18, приводной кулачок 15, благодаря наличию гайки 7, начинает смещаться влево. При этом штанга 13 начинает подниматься вверх (толкатель 31 остается в прежнем положении, поскольку его ролик 33 продолжает контактировать с горизонтальной частью нижней поверхности приводного ползуна 14, следовательно, он поднимает регулировочную планку 10, а также приводную ра5
5
му 5. Приводная рама 5 смешает вверх верхние концы тяг 4, которые поднимают вверх верхние плечи двуплечих рычагов 1, сводя тем самым зажимные губки 22. Процесс зажима груза заканчивается в тот
момент, когда конец штанги 13 выходит на горизонтальную часть поверхности приводного ползуна 15. При этом ролик толкателя 31 продолжает контактировать с горизонтальной частью нижней поверхности
приводного ползуна 15.
В случае необходимости кантования груза приводной двигатель 19 включается повторно и происходит дальнейшее перемещение приводного ползуна 15 влево. При этом щтанга 13 больше не перемещается вверх, а ролик толкателя 31 начинает контактировать с наклонной частью нижней поверхности приводного ползуна 15, сле- - довательно толкатель 31 начинает поворачиваться и поворачивает стержень 30.
0 Это приводит к повороту вилок 29, а следовательно, и ведущих осей 27, которые посредством рычагов поворачивают поворотные оси 25, а следовательно, и зажимные губки 22. Таким образом осуществляется кантование груза до тех пор, пока ролик 33 толкателя 31 не выйдет на горизонтальную часть нижней рабочей поверхности приводного ползуна 15.
Формула изобретения
Захват-кантователь, содержащий раму, шарнирно связанные с ней двуплечие рычаги, на верхних плечах которых шарнирно закреплены тяги, свободные концы которых связаны общей горизонтальной осью, а на нижних закреплены зажимные губки, жестко связанную с рамой вертикальную направляющую для общей горизонтальной оси тяг, средство управления двуплечими рычагами, механизм кантования и орган соединения с подъемной машиной,
40 отличающийся тем, что, с целью улучшения эксплуатационных характеристик, средство управления двуплечими рычагами включает горизонтальную направляющую, жестко связанную с рамой поперечно плоскости расположения двуплечих рычагов, фигурный приводной ползун, установленный на горизонтальной направляющей, верхняя часть которого выполнена с горизонтальными смещенными друг относительно друга в вертикальной плоскости участками и расположенным между ними наклонным от вертикальной оси симметрии участком, а захват-кантователь снабжен механизмом настройки на размер груза, включающим приводной кулачок, кинематически связанный с общей горизонтальной осью тяг и рас55 положенный в поперечной ей плоскости, вертикальную направляющую, жестко связанную с общей горизонтальной осью тяг и расположенную под кулачком, щтан5
45
50
ГУ, установленную в вертикальной направляющей и подпружиненную относительно нее с возможностью взаимодействия верхнего конца с .рабочей поверхностью кулачка, а нижнего - с ползуном, при этом двуплечие рычаги связаны между собой
общей горизонтальной осью, зажимные губки закреплены на нижних плечах рычагов посредством сферических шарниров, а общая горизонтальная ось тяг подпружинена в вертикальной плоскости относительно органа соединения с подъемной машиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Захват-кантователь | 1988 |
|
SU1530559A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Кантователь | 1976 |
|
SU599873A2 |
| ЗАХВАТ-КАНТОВАТЕЛЬ | 1995 |
|
RU2109675C1 |
| Кантователь шагового конвейера | 1988 |
|
SU1627467A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| Захват-кантователь | 1988 |
|
SU1588689A1 |
Изобретение относится к подъемно-транспортной технике ,в частности, к захватам-кантователям. Целью изобретения является улучшение эксплуатационных характеристик. Захват-кантователь содержит средство управления двуплечими рычагами, включающее фигурный приводной ползун и механизм настройки на размер, включающий приводной кулачок и штангу. Изменением положения штанги относительно поверхности ползуна определяется настройка зажимных губок на размер груза и степень их сведения для захвата груза. 1 ил.
13
| Захват-кантователь | 1973 |
|
SU446460A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
