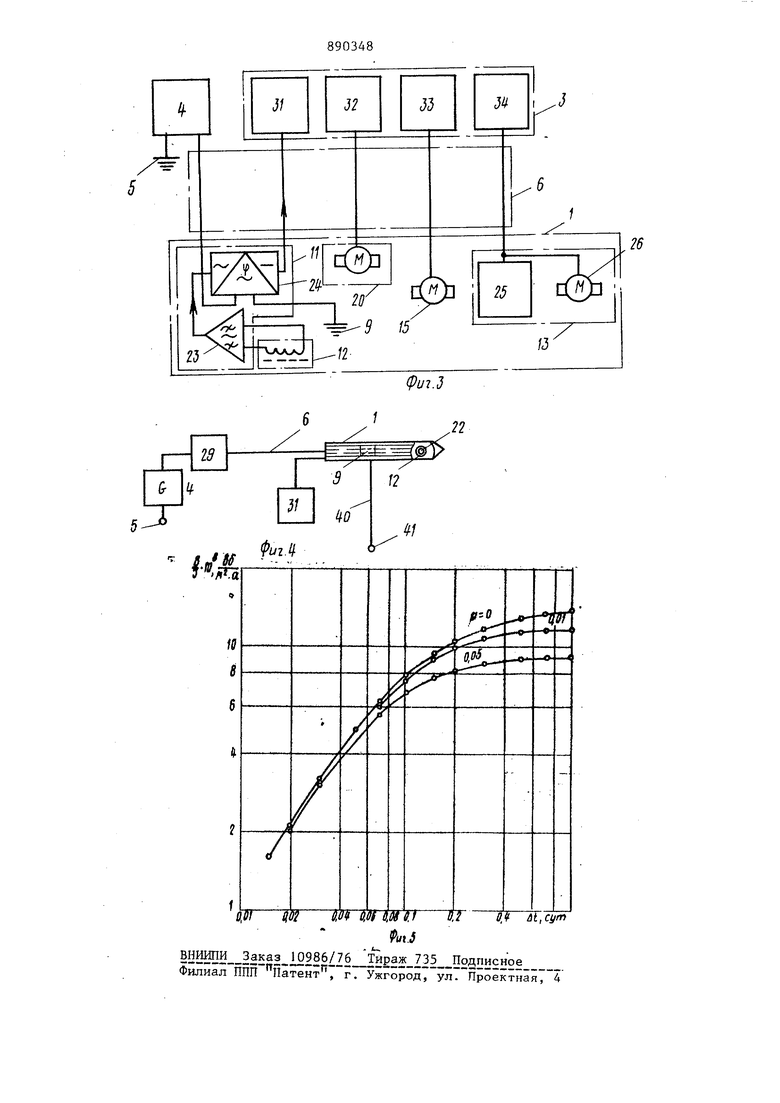
ного электрического тока, измерение характеристик электромагнитного поля определение элементов вектора скорости движения подземных вод по измене нию во времени характеристик электро магнитного поля. Изучение характерис тик электромагнитного поля сводится к периодической съемке на поверхности земли замкнутых вокруг устья скв жины изолиний электрического потенци ала или компонентов магнитного поля По направлению и скорости смещения изолиний определяют соЬтветственно направление и действительную скорост движения подземных вод. Для реализации известного способа используют устройство, содержащее да чик магнитной индукции с системой ег ориентации, измерительный прибор, на земный электрод, сквалданный снаряд, подвешенный на кабеле, с электродом и емкостью с индикаторным веществом, спуско-подъемный механизм сква жинного снаряда и генератор перемен ного электрического тока, соединенный с наземным электродом и скважин ным снарядом ГЗ. Однако точность определения известным способом элеметров движения подземных вод существенно зависит от глубины залегания водоносного го ризонта, в силу чего практическое и пользование способа ограничивается глубинами до 00 м. Применение его осложняется в условиях застроенной территории и интенсивно расчлененного рельефа дневной поверхности. Кроме того, способ весьма трудоемок поскольку на поверхности земли изолинии снимают поточечно и при 2-3 положениях неподвкяшого электрода. При этом, для каждого положения неподвижного электрода фиксируют не менее трех изолиний с ясно наметившимся смещением в сторону движения потока подземных вод, что составляет при обычной восьмилучевой системе наблюдений, как минимум, 120180 точек измеренш. Целью изобретения является повышение точности измерений путем исключения ограничений от глубинности исследований и характера дневной поверхности. Поставленная цель достигается тем, что согласно способу определения по одиночной скважине вектора скорости движения подземных вод, включающему создание в водоносном 84 интервале скважины зоны электролита, подведение переменного электрического тока к зоне электролита, измерение характеристик электромагнитного поля и определение элементов вектора скорости подземных вод по изменению во времени характеристик электромагнитного поля, при создании зоны электролита фиксируют ее высоту, в качестве характеристики электромагнитного поля используют характеристики вектора магнитной индукции, которую измеряют в скважине вблизи зоны электролита, и по изменению во времени величины век- тора магнитной индукции с учетом высоты зоны электролита определяют величину скорости движения подземных вод, а направление движения определяют по направлению этого вектора при фиксированном направлении питающего тока. Кроме того, в устройство для определения по одиночной скважине вектора скорости подземных вод, содержащее датчик магнитной индукции с системой его ориентации, измерительный прибор, наземный электрод, сквалсинный снаряд, подвешенный на кабеле, с электродом и емкостью с индикаторньм веществом, спуско-подъемный механизм скважинного снаряда и генератор переменного электрического тока, соединенный с наземным электродом и скважинным снарядом, введен фазочувствительный детектор, скважинный снаряд снабжен приспособлением для ввода электролита, а ёмкость с индикаторным веществом снабжена гслапаном подачи, причем фазочувствительный детектор соединен измерительным входом с выходом датчика магнитной индукции, опорным входом с выходом г-внератора и выходом - с входом измерительного прибора, а датчик магнитной индукции - с системой его ориентации размещен в скважинном снаряде. На фиг. 1 изображена схема устройства, реализующего способ определения по одиночной скважине вектора действительной скорости движения подземных вод; на фиг, 2 - схема скважинного снаряда, на фиг. 3 - электрическая схема устройства, на фиг.4схема настройки устройства в плане; на фиг. 5 - палеточные кривые зависимости величины вектора магнитной : индукции от времени измерения. Устройство для осуществления спо соба определения по одиночной скважине вектора действительной скорост движения подземных вод (фиг. I ) включает скважинный снаряд 1, спуско-подъемный механизм 2, пульт 3, генератор 4, наземный электрод 5 и кабель 6. В скважинном снаряде 1 (фиг. 2) размещены емкость 7 с инди каторным веществом 8, электрод 9, приспособление 10 для ввода электролита, электронный блок 11, датчи магнитной индукции 12 с системой его ориентации 13. Корпус скважинного снаряда 1 изготовлен из жесткого диэлектрического материала, например стеклопластика. Емкость 7 может быть выполнена в виде герметичного верхнего отсека скважинного снаряда 1, в котором размещен заполненный растворимым в воде индикаторным веществом 8, (например поваренной солью) контейнер 14 с водо прошгцаемыми стенками и клапан пода чи 15, регулирующий связь емкости 7 с приспособлениями 10 для ввода элейтролита и приводимый в движение электродвигателем 16. Скважинный электрод 9 выполнен в виде цилиндра из коррозионностойкого металла. Приспособление 10 для ввода элек тролита может быть выполнено в виде среднего отсека скважинного снаряда 1 с водопроницаемой, например перфо рованной, боковой поверхностью 17 и пакета 18, например электрогидрав лического типа, включающего полую кольцевую уплотнительную камеру 19, оболочка которой изготовлена из эластичного материала (например, ре зины) , и- реверсивный электрический гидронасос 20. Датчик магнитной индукции I2 ори ентирован преимущественно перпендикулярно оси скважинного снаряда 1 и может быть вьшолнен в виде намотанной изолированным проводом катушки индуктивности 21 со стержневым ферритовым сердечником 22, настроенной на рабочую частоту генератора 4 переменного тока (см. фиг. и установленной перпендикулярно оси скважинйого снаряда 1 с возможностью вращения вокруг этой оси так чтобы центр ее при этом находился на оси скважинного снаряда 1. Скважинный электронный блок 11 (фиг. З) содержит предварительный усилитель 23, настроенный на частоту генератора 4, и фазочувствительный детектор 24. Система ориентации 13 включает датчик азимута 25 и реверсивный электродвигатель 26 с редуктором 27 (см. фиг. 2), выходной вал 28 которого расположен соосно корпусу скважинного снаряда 1. Спуско-подъгмный механизм 2 (см. фиг. l) вклюшет каротажную лебедку 29 и блок1аланс 30. В пульпе 3 (см. фиг. З) находится измерительный прибор 31, блок управления пакером 32, блок управления клапаном подачи 33 и блок управления системой ориентации 34. При помощи кабеля 6 осуществляется механическое соединение скважинного снаряда. 1 со спуско-подъем- ным механизмом 2, электрическая связь генератора 4 с электронным блоком 1 и пульта 3 с элементами скважинного снаряда 1 . Выход датчика магнитной индукции 12 соединен через предварительный усилитель 23 с измерительным входом фазочувствительного детектора 24. KD входу опорного сигнала фазочувствительного детектора 24 подключен скважинный электрод 9 и через кабель 6 - генератор 4 переменного тока . Выход фазочувствительного детектора 24 посредством кабеля 6 связан со входом измерительного прибора 31. Выходной вал 28 редуктора 27 механически связан с датчиком магнитной индукции 12 и кинематически (например при помощи зубчатой передачи 35 ) - с датчиком азимута 25. Уплотнительная камера 19 пакера 18 через рабочую полость гидронасо- са 20 и наружное отверстие 36 в корпусе скважинного снаряда 1 посредством трубопроводов 37 и 38 гидравлически связана с внешним пространством. Устройство работает следующим образом. Настройку устройства проводят на поверхности земли 39 по схеме, показанной на фиг. 4 и включающей кроме названных элементов и блоков 1, 4, 5, 6, 29 и 31 прямолинейный отрезок провода 40, заземленный вспомогательным электродом 41, подключенным к электроду 9 скважинного снаряда 1. При настройке добиваются, чтобы при рабочей величине выходного тока I генератора 4 обеспечивался уверенный прием. необходимое усиление, фазочувствительное выпрямление и измерение сигнала, возбуждаемого на выходе датчика 12 током J , протекающем в прямолинейном отрезке провода 40. В вертикальном положении оси максималь ной чувствительности датчика 12 (совпадающей с продольной осью сердечника 22 катушки индуктивности 21) определяют .положительное направление этой оси, соответствующее направлению снизу вверх при положительном сигнале на входе измерительного прибора 31, и фиксируют это направление в датчике азимута 25. Этим обеспечивается определение направления вектора магнитной индукции при фиксированном направлении тока во внешней цепи генератора 4 (от электрода 9 скважинного снаряда 1 - к наземному электроду 5), При определениях вектора скорости движения подземных вод устройство рас полагают на поверхности земли 39 вблизи устья сквалшны 42 вскрывающей исследуемый водоносный пласт 43, и собирают схему согласно фиг. 1 Наземный электрод 5, выполненный, например в виде металлического стерж ня, заземляют вблизи устья скважины 42. В качестве наземного электрода .5 можно использовать таклсе кондуктор скважины 42 (не показан). Контейнер 14 скважинного снаряда загружают поваренной солью, заливают емкость 7 водой и закрывают кла пан подачи 15. Скважинный снаряд 1 с помощью лебедки 29 и блок-баланса 30 опускают на кабеле 6 в скважину 42 на требуемую глубину. По сигналу с блока управления пакером 32 пульта 3 включают гидронасос 20 на перекачивание воды из ствола скважины 42 в сложенную уплотнительную камеру 19. Расширяясь под давлением поступающей в нее воды, камера 19 перекрывает ствол скважины 42. Включают генератор 4 переменного тока. Электрический ток с выхода генератора 4 по ка белю 6 через вход опорного сигнала фазочувствительного детектора 24 по средством скважинного и наземного электродов 9 и 5 подается в землю. Измеряют вектор фоновой магнитной индукции ,., на оси скважины 42, для чего по сигналу с блока управления системой ориентации 34 включа ют электродвигатель 26 и осуществля ЮТ поворот датчика магнитной индукции 12 вокруг оси скважинного снаряда I, поддерживая постоянной величину выходного тока генератора 4 и измеряя при помощи измерительного прибора 31 напряжение ли на выходе фазочувствительного детектора 24, устанавливают датчик магнитной индукции 12 в положение, соответствующее максимальному положительному значению измеряемого напр яженияди снимают показания измерительного прибора 31, при помощи системы ориентации 13 определяют азимут AQ переданного в датчик азимута 25 (посредством зубчатой передачи 35) положительного направления оси максимальной чувствительности датчика Магнитной индукции 12. Величину измеренного вектора магнитной индукции Во определяют по формуле В0 КйиЗ; а направление вектора о определяют как азимут АО . По сигналу с блока управления клапаном подачи 33 открывают клапан 15 и фиксируют момент времени открытия to . Электролит 44 из емкости 7 через клапан подачи 15 под действием силы тяжести поступает в средний отсек скважинного снаряда 1 и в скважинное пространство в интервал ввода электролита J ограниченный верхней частью оболочки уплотнительной камеры 19 и верхней кромкой водопроницаемой боковой поверхности 17, и вытесняет оттуда, как менее плотную пресную воду 45, посредством него фиксируется высота сечения AVi зоны электролита 46 при входе в пласт 43. При этом пресная вода 45 (вытесненная электролитом, а также фильтрующая из водоносного .пласта 43 и свободно проникающая через боковую поверхность 17 среднего отсека) поступает через клапан подачи 15 в емкость 7 и растворяет индикаторное вещество 8 в контейнере 14, превращаясь в электролит 44, Электролит 44 из ствола скважины 42 сносится фильтрационным потоком в водоносный пласт 43, образуя подвижную зону электролита 46 (сечение которой определяется высотой интервала ввода электролита д и конструкциями скважинного снаряда 1 и фильтра скважины 42), вытянутую по напряжению движеш-т подземных вод. Задний фронт этой зоны 46 ос9тается неподвижным около скважинного электрода 9, при помощи которого от генератора 4 к зоне электролита 46 подводят переменный ток , а передний фронт движется со скоростью движения подземных вод. Повышенная электропроводность подвижной зоны электролита 46 вызывает увеличение плотности электрического тока в пределах этой зоны и возникновение аномального магнитного поля, направление линий индукции 8а которого определяется по пра вилу буравчика, В фиксированные моменты времени t, t, tj,,.., t при помощи датчика 12 и системы ориентации 13 производят измерения вектора магнит ной индукции B(t) на оси скважины 42 в одной точке вблизи зоны электролита 46 в той же последовательности, что и при измерении вектора %0 Моменты t), t(, t,,, , , рремени измерения при этом выбирают такими, чтобы соответствующие интервалы времени д t,utQ,ut j, . .-ut,, отсчитываемые от момента tg открытия клапана 15, составляли геометричную прогрессию со знаменателем, равным 1,5-1,6, При этом первое измерение вектора магнитной индукции В (t J про изводят сразу после открытия клапан 15, Измерения вектора магнитной индукции BltJ прекращают при отсутств заметных изменений величины измеряемого напряжениями датчика 12 за п риод от предыдущего (n-l)-ro до последующего v -ного измерения. По полученным данным для каждого момента и t (i-1- п) определяют анома ный. вектор магнитной индукции путем векторного вычитания из вектора магнитной индукции В (it) век тора фона магнитной индукции Во измеренного до открытия клапана 15 По значениям аномального вектора магнитной индукции ( , приведенным к единичному питающему току ( А), на билогарифмическом бла ке строят график практической зависимости изменения во времени приве денной величины аномального вектора магнитной индукции и « (и i -.f . / - J I л t Величину скорости V движения под земных вод определяют по изменению во времени приведенной величины аномального вектора магнитной индук ции путем сравнения практического графика B(ut) с пале точно/ кри 8 .10 вой B(it) (фиг, 5), построенной в том же масштабе по эмпирическим данным (при тарировке данного устройства в сходных условиях и известной скорости движения подземных вод) или рассчитанной для этих же условий теоретически приведенной к единичной силе тока и единичной действительной скорости. Приведенные на фиг, 5 палеточные кривые В-г-(д-Ь) рассчитаны для параметра относительного сопротивления зоны электролита 46 ,01 и 0,05 при фиксированных значениях эффективного радиуса поперечного сечения зоны электролита 46 и расстояния Н между центрами датчика 12 и электрода 9, равных 0,06 и 0,68 м соответственно, и диаметра dj скважины 42, равном 0,11 м. Эффективный ра.диус р зоны электролита 46 рассчитан по формуле г -J°LA . Совмещение кривых производят, сохраняя взаимную параллельность соответствующих координатных линий. При этом, вследствие различия формы палеточных кривых Ъ-(±) для различных значений относительного сопротивления /U, зоны электролита 46., совмещение практического графика 8(д1) достигается только с одной из палеточных кривых -(.) , параметр которой JU.- соответствует величине относительного сопротивления зоны электролита 46 при выбранном эффективном сечении, Величину вектора скорости движения подземных вод V определяют в положении совмещения кривых, как значение абсциссы дt палеточной кривой BY (лt) , совпадающей с абсциссой практической кривой Bf, (ДЬ) , а направление движения подземных вод определяют, в соответствии с проведенной настройкой схемы устройства, как азимут, на 90°больший азимута Л| аномального вектора Вд(Л-1к) для последнего уу -ного измерения. Пример. Предлагаемый способ испытан в полевых условиях, при этом выбраны следующие значения основных параметров, высота интервала ввода электролита uli 0,028 м, расстояние от зоны электролита до точки измерения вектора магнитной индукции ,038 м, диаметр скважины d 0,025 м, частота и величина питающего тока 5,8 кГц и 3 0,04 А. Чувствительность датчика магнитной индукции ,67ЧО Jl При этом величина аномального ве тора магнитной индукции бд , измер ная в конце следующих интервалов времени i отсчитьшаемых с момента начала ввода электролита, сути: 4t 0,021, 0,042, 0,067, 0,15 и 0,2 обставляет соответственно,8а 50,0, 59,6, 68,2, 73,4, и 74,7. , а определенная при сравнении с теоретическими кривыми, рассчитанными дл указанных условий и ряда значений относительного сопротивления зоны электролита /л 0, 0,01 и 0,05, величина действительной скорости подземных вод составляет V 1,9 м/сут, Направление движения подземных вод определяют, в соответствии с проведенной настройкой устройства, как азимут, на 90 болыпий азимута вектора магнитной индукции при условно-положительном направлении питающего тока. Расхождения между фактическим вектором действительной скорости по земных вод и определенным по предло женному техническому решению составляют по направлению - 3,0 град, по ве.личине - 5,0%. Использование предложенного способа и реализующего его устройства обеспечивает независимость точности определения вектора действительной скорости движения подземных вод от глубины залегания водоносного горизонта и характера рельефа дневной поверхности, поинтервальные определения вектора скорости, снижение трудоемкости работ, сокращение длительности периода наблюдений, что повышает экономичность работ и расширит масштабы производственного применения предложенного техническо го решения. Формула изобретения 1. Способ определения по одиночной скважине вектора скорости движе ния подземных вод, включакнций создание в водоносном интервале скважи ны зоны электролита, подведение пер менного электрического тока к зоне электролита., измерение характеристи электромагнитного поля и определение элементов вектора скорости движения подземных вод по изменению во времени характеристик электромагнитного поля, отличающийс я тем, что, с целью повышения точности измерения путем исключения ограничения от глубинности исследования скважины и характера дневной поверхности, при создании зоны электролита фиксируют ее высоту, в качестве характеристики электромагнитного поля используют характеристики вектора магнитной индукции, которую измеряют в скважине вблизи зоны электролита, и по изменению во времени величины вектора магнитной индукции с учетом высоты зоны электролита определяют величину скорости движения подземных вод, а направление движения определяют по направлению этого вектора при фиксированном направлении питающего тока. 2. Устройство для определения по одиночной скважине вектора скорости подземных вод, содержащее датчик магнитной индукции с системой его ориентации, измерительный прибор, наземный электрод, подвешенный на кабеле скважинный снаряд с электродом и емкостью с индикаторньм веществом, спуско-подъемный механизм скважинного снаряда и генератор переменного электрического тока, соединенный с наземным электродом и скважинным снарядом, отличающееся тем, что, в него введен фазочувствительный детек тор J скважинный снаряд снабжен приспособлением для ввода электролита, а емкость с индикаторным веществом снабжена клапаном подачи, причем фазочувствительный детектор соединен измерительным входом с выходом датчика магнитной индукции, опорным входом - с выходом генератора и выходом - с входом измерительного прибора а датчик магнитной индукции с системой его ориентации размещен в скважинном снареде... Источники информации, принятые во внимание при экспертизе 1.Матвеев Б.К. Геофизические методы изучения движения подземных вод. М., Госгеолтехиздат, 1963, с. 33. 2.Авторское свидетельство СССР № 661481, кл, G 01 V 9/02, 1972. 3.Справочное руководство гидрогеолога. Под ред. Б.М.Максимова, Л., Недра, 1967, т. 2, с. 131, (прототип) .
Л



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления и скорости движения подземных вод | 1977 |
|
SU661481A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| СКВАЖИННЫЙ ГЕОЛОКАТОР | 1965 |
|
SU172507A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Устройство для определения направления и скорости движения подземных вод | 1986 |
|
SU1381409A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Способ обнаружения и исследования подземных водотоков | 1983 |
|
SU1105844A1 |
| Устройство для геофизическихиССлЕдОВАНий МЕжСКВАжиННОгО пРО-CTPAHCTBA | 1978 |
|
SU851311A1 |

.11
Ф-5 /5
/2лЛиЛ./
26
25
/J
10
..if %«
Ю
.a
«
/
б
/
A
«
r-°
:
