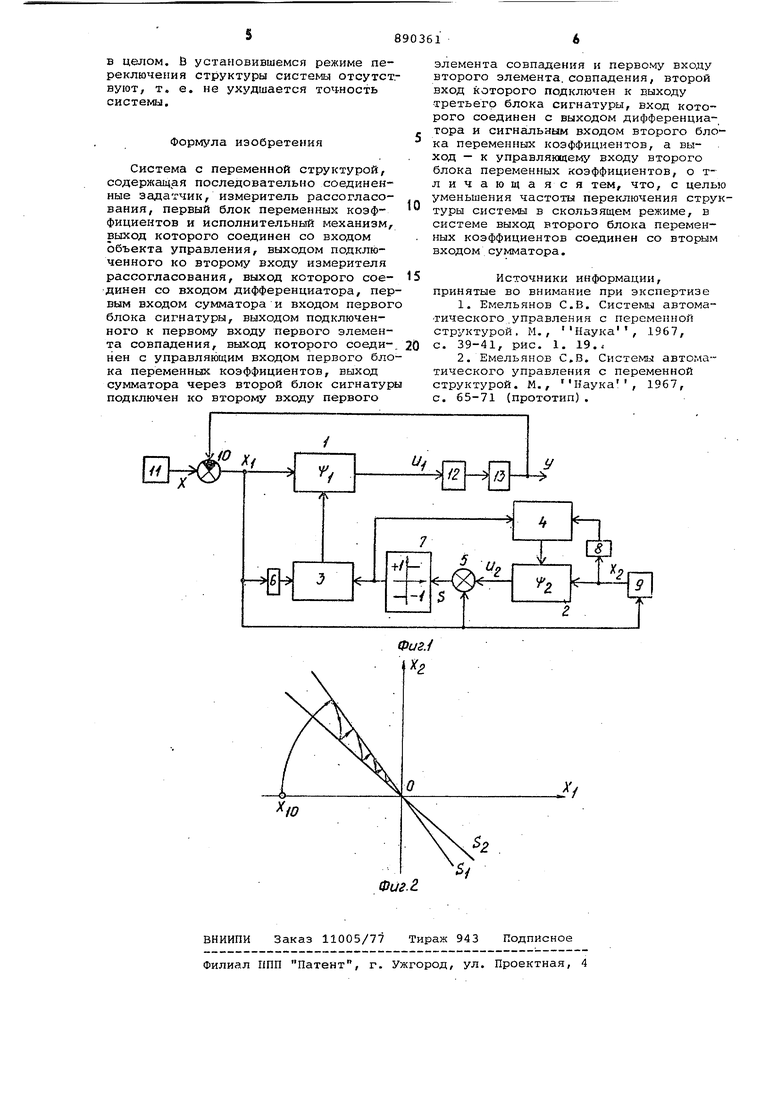
Изобретение относится к системам переменной структурой и может найти широкое применение при создании авто пилотов пилотируемых и беспилотных летательных аппаратов и судов на воз душной подушке, а также в химической нефтехимической, нефтяной, газовой,. электротехнической, металлургической и других отраслях промышленности. Известна система с переменной стру турой, содержащая последовательно соединенные задатчик, измеритель рас согласования, блок переменных коэффициентов и исполнительный механизм вывод которого соединен со входом объекта регулирования, выходом подключенного ко второму входу измерителя рассогласования, и блок изменения структуры, входы которого подклю чены к датчикам параметров системы, доступных измерению, а вход - к управляющему входу блока переменных коэффициентов 1. Недостатком этой системы является то, что идеальная релейная характеристика блока изменения структура приводит к бесконечно большой частоте смены структуры системы при возникновении скользящего режима, что требует создания ключевых элементов блока переменных коэффициентов с неограниченным частот 1ым диапазоном. Однако реальные ключевые элементы из-за требований к надежности и допустимым тепловым потерям работают в ограниченном частотном диапазоне, что существенно затрудняет техническую реализацию систем с переменной структурой по известной схеме. Наиболее близкой по технической сущности к изобретению является система с переменной структурой, содержащая последовательно соединенные задатчик, измеритель рассогласования, первый блок переменных коэффициентов и исполнительный механизм, выход которого соединен со входом объекта управления, выходом подключенного ко второму входу измерителя рассогласования, выход которого соединен со входом дифференциатора, первым входом сумматора и входом первого блока сигнатуры, выходом подключенного к первому входу первого элемента совпадения, выход которого соединён с управляющим входом первого блока переменных коэффициентов, выход сумматора через второй блок сигнатуры подключен ко второму входу первого элемента совпадения и первому входу второго элемента совпадения, второй вход которого подключен к выходу третьего блока сигнатуры, вход которого соединен с выходом дифференциатора и сигнальным входом второго блока переменных коэффициентов, а выход - к управляющему входу второго блока переменных коэффициентов 2. Недостатком известной системы является бесконечно большая частота переключения структуры системы в скользящем режиме. Цель изобретения - уменьшение частоты переключения структуры системы в скользящем режиме. Поставленная цель достигается тем что в системе выход второго блока пе ременных коэффициентов соединен со вторым входом сумматора. На фиг. 1 представлена блок-схема система; на фиг. 2 - фазовый портрет системы. Система содержит блоки 1 и 2 пере менных коэффициентов, элементы 3 и 4 совпадения, сумматор 5, блоки 6-8 сигнатуры, дифференциатор 9, измеритель 10 рассогласования, задатчик 11 исполнительный механизм 12, объект 13 управления, х - задающее воздейст вие, у - регулируемая координата, х, X rj - соответственно сигнал рассог ласования и его первая производная, S - сигнал переключения, U/f - сигнал управления, U сигнал коррекции Si - соответственно первая вторая линии переключения. Система работает следующим образо Задающее воздействие х с выхода задатчика 11 поступает на первый вход измерителя 10 рассогласования, на второй вход которого поступает регулируемая координата у с выхода объек та 13 управления. На выходе измерите ля 10 формируется сигнал рассогласования Хх| , который поступает на первы ьход сумматора 5 и входы дифференциа тора 9, блок 6 сигнатуры и блока 1 переменных коэффициентов. Блок 1 формирует сигнал управлени и ;, Ч х,х путем изменения коэффициен та передачи канала управления по величине и знаку согласно следующему закону: ц, dL при 1 |ibi при где х - сигнал рассогласования системы;S - сигнал переключения; с1..,и (Ь - коэффициенты блока 1 переменных коэффициентов. Знаки сигнала рассогласования х и сигнала переключения S определяются с помощью блоков б и 7 сигнатуры. Сравнение знаков (т. е. определение знака логического произведения ) сигнала рассогласования x.f и сигнала переключения S осуществляется в элементе 3 совпадения, выходной сигнал которого управляет работой блока 1 перемергных коэффициентов. Сигнал переключения S формируется на выходе сумматора 5, на выходе которого поступают сигнал рассогласования х и сигнал коррекции U . с выхода блока 2 переменных коэффициентов, который изменяет по величине и знаку коэффициент передачи по первой производной от сигнала рассогласования согласно следующему закону: TcLi при Ч; при , где X - производная от сигнала рассогласования;S - сигнал переключения; 4- коэффициенты блока 2 переменных коэффициентов. Первая производная сигнала рассогласования X ,1 формируется на выходе дифференциатора 9. Знаки первой производной сигнала рассогласования Хл. и сигнала переключения S определяются с помощью блоков 8 и 7 сигнатуры. Срав {ение знаков (т.е. определение знака логического произведения ) первой производной сигнала, рассогласования xj и сигнала переключения S осуществляется в элементе 4 совпгздения. выходной которого управляет работой блока 2 переменных коэффициентов. В результате изменения по величине и знаку коэффициента переэдачи по первой производной сигнала рассогласования формировании, сигнала, переключения S сигнал переключения S изменяется по следующему закону: о rS-j x-j+oij x 2 при Is х +|Ьг| Х2 при где X. - сигнал рассогласования; производная сигнала рассогласования;S - сигнал переключения; fti - коэффициенты блока 2 переменных коэффициентов; ( линии переключения. Таким образом, на фазовой плоскости фактически присутствуют две линии переключения Sij, положение которых при Idii) изображено на фиг. 2. При и линией, смены структуры системы является S., , а при Sx О и - 82.. Из этого следует, что возникающий в системе скользящий режим протекает Между линиями переключения Si (см. фиг. 2) с конечной частотой, значение которой определяется соотношением коэффициентов передачи IiQ. В установившемся режиме, т. е. в начале координат фазовой плоскости, колебания в системе отсутствуют. Таким образом, в результате указанных особенностей системы переходные процессы в ней протекакгт в скользящем режиме с конечной, наперед зада.ной частотой смены структуры системы, что повышает надежность системы в целом, В установившемся режиме переключения структуры системы отсутст вуют, т. е. не ухудшается точ-ность системы. Формула изобретения Система с переменной структурой, содержащая последовательно соединенные задатчик, измеритель рассогласования, первый блок переменных коэффициентов и исполнительный механизм, выход которого соединен со входом объекта управления, выходом подключенного ко второму входу измерителя рассогласования, выход которого соединен со входом дифференциатора, пер вым входом сумматора и входом первог блока сигнатуры, выходом подключенного к первому входу первого элемента совпадения, выход которого соедийен с управляющим входом первого бло ка переменных коэффициентов, выход сумматора через второй блок сигнатур подключен ко второму входу первого элемента совпадения и первому входу второго элемента, совпадения, второй вход которого подключен к выходу третьего блока сигнатуры, вход которого соединен с выходом дифференциатора и сигнальным входом второго блока переменных коэффициентов, а выход - к управляющему входу второго блока переменных коэффициентов, о тличающаяся тем, что, с целыо уменьшения частоты переключения структуры системы в скользящем режиме, в системе выход второго блока переменных коэффициентов соединен со вторим входом сумматора. Источники информации, принятые во внимание при экспертизе 1.Емельянов С,В. Системы автоматического управления с переменной структурой. М., Наука, .1967, с. 39-41, рис. 1. 19.. 2.Емельянов С,В. Системы автоматического управления с переменной структурой. М., Наука, 1967, с. 65-71 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Устройство для формирования сигнала управления | 1977 |
|
SU734612A1 |
| Адаптивная система управления с переменной структурой | 1988 |
|
SU1659980A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| Следящая система | 1979 |
|
SU788076A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| Регулятор | 1983 |
|
SU1166060A1 |
