(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДАТЧИКОВ изобретение относится к автома гическому контролю датчиков угловых перемещений, а именно к способам определения параметров датчиков угла. Известен способ определения погр ности датчиков угла, согласно котор му на основе результатов измерения напряжения в квадратурной обмотке п определенных включениях синусной и косинусной обмоток определяют значение разности сопротивлений взаимо индукции синусной и косинусной обмо ток и по величине разности сопротив лений судят о погрешности вращающегося трансформатора ij. Недостаток известного способа состоит в том, что он не может применяться для определения таких пара метров вращающихся трансформаторов, как погрешности отображения синусной зависимости, асимметрии нулевых точек и остаточных .ЭДС, коэффициентов передачи и др. Кроме того, при таком способе необходима установка ротора контролируемого вращакядегося трансформатора в угловые положения Э и 4, что усложняет процесс измерения.
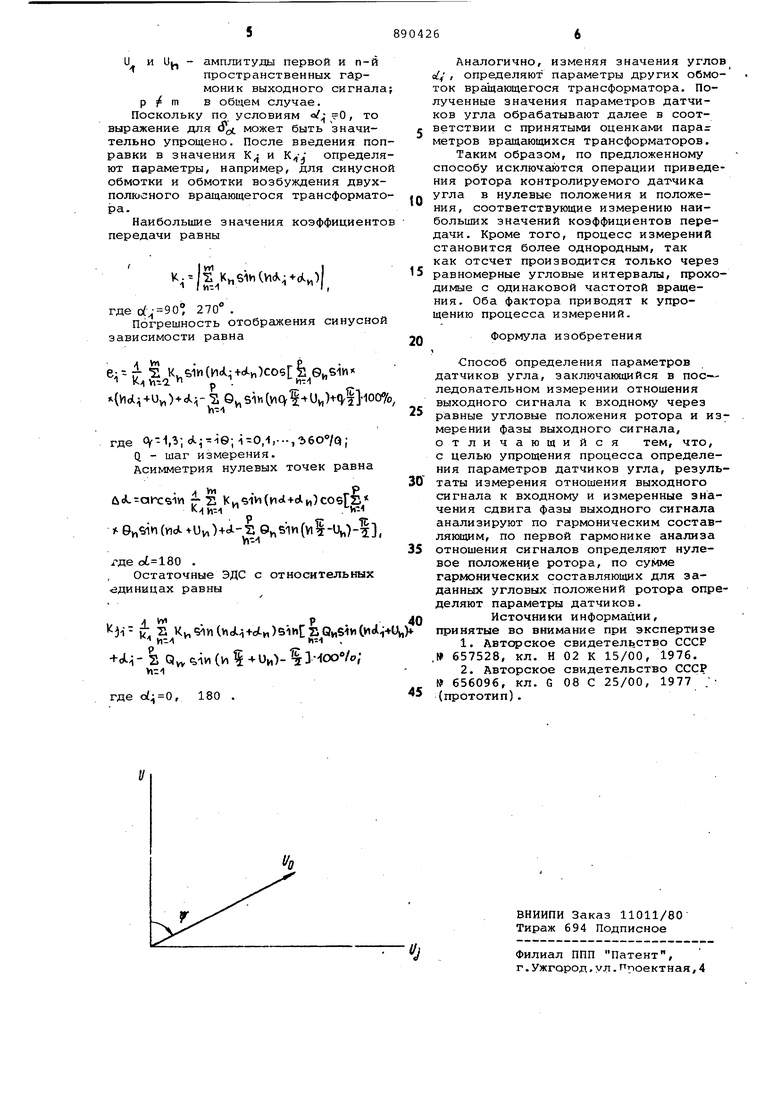
УГЛА Наиболее близким по техническому решению к изобретению является способ определения параметров датчиков угла, заключатсяцийся в том, что при . каждомугловом положении ротора измеряют отношение i выходного сигнала ко входному, изменение сдвига фазы выходного сигнала и ,у гло-вое положение oi ротора. Приэтом для проверки параметров датчика угла ротор датчика предвари тельно устанавливают в нулевое положение, соответствующее нулевой отметке, или определяют его по минимуму отношения выходного сигнала к входному при повороте ротора датчика с малой, частотой вращения. При проверке коэффициента передачи ротор устанавливают в угловые положения, соответствующие наибольшему потокосцеплению между обмотками, при проверке асимметрии нулевых точек и остаточных ЭДС нулевые положения определяют экспериментально по минимуму от ношения Г2 J. Необходимость установки ротора датчика в заданные угловые положения и поворот ротора с малой частотой вращения усложняет; процесс измерения параметров датчиков угла. Цель изобретения - упрощение про цесса определения параметров датчиков угла. Поставленная цель достигается за счет того, что согласно способу определения параметров датчиков угл заключающемуся в последовательном измерении отношения выходного сигна .ла к входному через равные угловые положения ротора и измерении фазы выходного сигнала, результаты измерения отношения выходного сигнала к входному и измеренные значения сдви :га фазы выходного сигнала анализиру по гармоническим составляющим, по первой гармонике анализа отношения сигналов определяют нулевое положение ротора, по сумме гармонических составляющих для заданных угловых положений ротора определяют парамет ры датчиков. На чертеже приведено векторное изображение выходного сигнала, напр мер, вращающихся трансформаторов. Этот сигнал характеризуется ампл тудой UQ и фазой Ч . Амплитуда выходного сигнала изме ется по закону синуса или косинуса от угла поворота ротора датчика. Из менение фазы выходного сигнала в ди пазоне угла поворота ротора 0-360 можно представить в виде Ч --dL 4-0 U), oL - угол поворота ротора; О периодическая составляющая, характеризующая нелинейное изменение фазы. При наличии во вращающемся транс форматоре пульсирующего поля знак функции Ф изменяется скачкообразно на противоположный при переходе рот ра вращающегося трансформатора чере нулевое угловое положение. При нали чии вращающегося поля крутизна изменения фазы в зоне нулевых угловых положений определяется отношением остаточной ЭДС Uj к наибольшему значению выходного сигнала U. Поскольку при измерениях отсчет фазы производят в дискретных точках, периодическую составляющую &j фазы с допустимой погрешностью можно представить, например, в виде конечной суммы ряда Фурье: 6(i.) 26.,sinChol.+Uv,). Оценку параметров вращаюЕШХСя трансформаторов проводят относитель но амплитуды и фазы выходного сигна ла, определяемых при повороте ротора на 90° от нулевого положения. По ложению вектора этого выходного сиг нала соответствует ордината U. Для каждого i-ro углового положения рот ра вращающегося трансформатора можно записать значения коэффициентов передачи в виде . .-С015(); остаточные ЭДС в относительных единицахKj---K,-feiii(4,)fOO% , где vfpQ - значения фазы выходного сигнала при повороте от нулевого положения на углы, кратные 90°. Измерения начинают от произвольного углового положения ротора вращающегося трансформатора. В этом случае из-за дискретности измерений полученные значения К , р- и о ivoгут не совпасть со значениями, необходимыми для определения параметров (например, нулевыг 1И угловыми положениями и др.), т.е. может оказаться, .что длд, определения параметров необходимо получить значения, лежащие в промежутке измеренными значениями. Кроме того,для определения параметров необходимо знать угловое положение, соответствующее нулевому положению ротора согласно нулевой отметке. Промежуточные значения непрерывной функции могут быть определены по известным значениям-функции в равноотстоящих точках с помощью гармонической интерполяции. Тогда последовательность определения параметров следующая. Ряды измеренных значений и () раскладывают в гармонические ряды относительно cL , по началу первой гармоники разложения находят нулевое положение вращающегося трансформатора, соответствующее нулевой отметке, затем относительно этого нулевого положения рассчитывают значения Kjj в заданных .угловых положениях ротора вращающегося трансформатора и по ним определяют параметры вращающегося трансформатора. При этом очевидно, что число измеренных значений К и должно быть выбрано таким, чтобы отклонения К и в промежуточных точках от фактических значений не превышали заданных величин. При определении нулевого положения, соответствующего нулевой отметке, необходимо учесть, что начапо первой гармоники разложения К может отличаться на несколько угловых минут от нулевого положения. Поэтому следует провести расчетом контрольную проверку относительно начала (.) первой гармоники и при необходимости внести поправку в определение нулевого поожения: , cf,--av4: si)i i- s l : 6ivi{v,.ci) K/,,;n cosTs (vid;- -Uy,)-i-di:-li a ( 1 ri 1 y n .u,)-, где ki-U /UBxiKn- nUg ; и и U,, - амплитуды первой и п-й пространственных гармоник выходного сигнал р - m в общем случае, Поскольку по условиям 0, то выражение для (Рд может быть значительно упрощено. После введения по равки в значения и определ ют параметры, например, для синусн обмотки и обмотки возбуждения двух полюсного вращающегося трансформат ра. Наибольшие значения коэффициент передачи равны К.,61И(,)1 ( П-ЧI г где d- 90° 270 . Погрешность отображения синусно зависимости равна |,v,si( ,) .{yi A;i+Uy,) + dL:i- (viql- Uv,Mi}l00 где Of-,,,-, Q - шаг измерения. Асимметрия нулевых точек равна S ()собГ KtVl-l- Ь-1 OMSin{rtdL Uv,) 6l,siM{vii-Uj,)-f h-i где , Остаточные ЭДС с относительных единицах равны . Kv,5iviUdL;i+d -,)sih sQMebM У1- й-1 , - S QW ьли (и i -t- UH)- 3 -(оо«/о; где . Аналогично, изменяя значения углов , определяют параметры других обмоток вращающегося трансформатора. Полученные значения параметров датчиков угла обрабатывают далее в соответствии с принятыми оценками пара метров вращающихся трансформаторов. Таким образом, по предложенному способу исключаются операции приведения ротора контролируемого датчика угла в нулевые положения и положения, соответствующие измерению наибольших значений коэффициентов передачи. Кроме того, процесс измерений становится более однородным, так как отсчет производится только через равномерные угловые интервалы, проходимые с одинаковой частотой вращения. Оба фактора приводят к упрощению процесса измерений. Формула изобретения Способ определения параметров датчиков угла, заключающийся в пос-.ледонательном измерении отношения выходного сигнала к входному через равные угловые положения ротора и измерении фазы выходного сигнала, отличающийся тем, что, с целью упрощения процесса определения параметров датчиков угла, результаты измерения отношения выходного сигнала к входному и измеренные значения сдвига фазы выходного сигнала анализируют по гармоническим составляющим, по первой гармонике анализа отношения сигналов определяют нулевое положение ротора, по сумме гармонических составляющих для заданных угловых положений ротора определяют параметры датчиков. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР , 657528, кл. Н 02 К 15/00, 1976. 2.Авторское свидетельство СССР № 656096, кл. G 08 С 25/00, 1977 ; (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля электрических машин | 1975 |
|
SU532871A1 |
| Способ вторичного симметрированияСиНуСНО-КОСиНуСНОгО ВРАщАющЕгОСяТРАНСфОРМАТОРА | 1979 |
|
SU849387A1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
| Способ контроля погрешностей круговых шкал | 1979 |
|
SU868337A1 |
| Устройство для проверки датчиков угла поворота вала | 1977 |
|
SU656096A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1262650A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
