(54) ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1217657A1 |
| Подвесное устройство для технического обслуживания автомобилей | 1983 |
|
SU1146224A1 |
| Стан пилигримовой прокатки труб | 1987 |
|
SU1405923A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МОТОРНО-ТРАНСМИССИОННОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102715C1 |
| Установка для гидродинамических испытаний судовых моделей | 1976 |
|
SU553513A1 |
| МАШИНА ДЛЯ СВАРКИ ТРЕНИЕМ | 1989 |
|
SU1737836A1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| СНЕГОБОЛОТОХОД | 2023 |
|
RU2801955C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
1
Изобретение относится к захватным устройствам, предназначенным для погрузочноразгрузочных, подъемно-транспортных и других технологических операций, выполняемых совместно с манипулятором или автооператором.
Известен захват, содержащий двигатель, механизм зажима с подпружиненными и установленными на оси зажимными элементами, направляющие и управляемые муфты 1.
Недостатком известного устройства является сложность конструкции.
Цель изобретения - упрощение конструкции.
Цель достигается тем, что захват снабжен винтовыми парами, раздаточным и дифференциальным редукторами, телескопическими валами и тягами, связанными с зажимными элементами с возможностью перемещения во взаимно перпендикулярных направлениях, причем выходной вал двигателя соединен через раздаточный редуктор с одним из телескопических валов, а управляемая муфта - с дифференциальным редуктором, при этом выходные валы редукторов образуют поступательные кинематические пары с зажимными элементами.
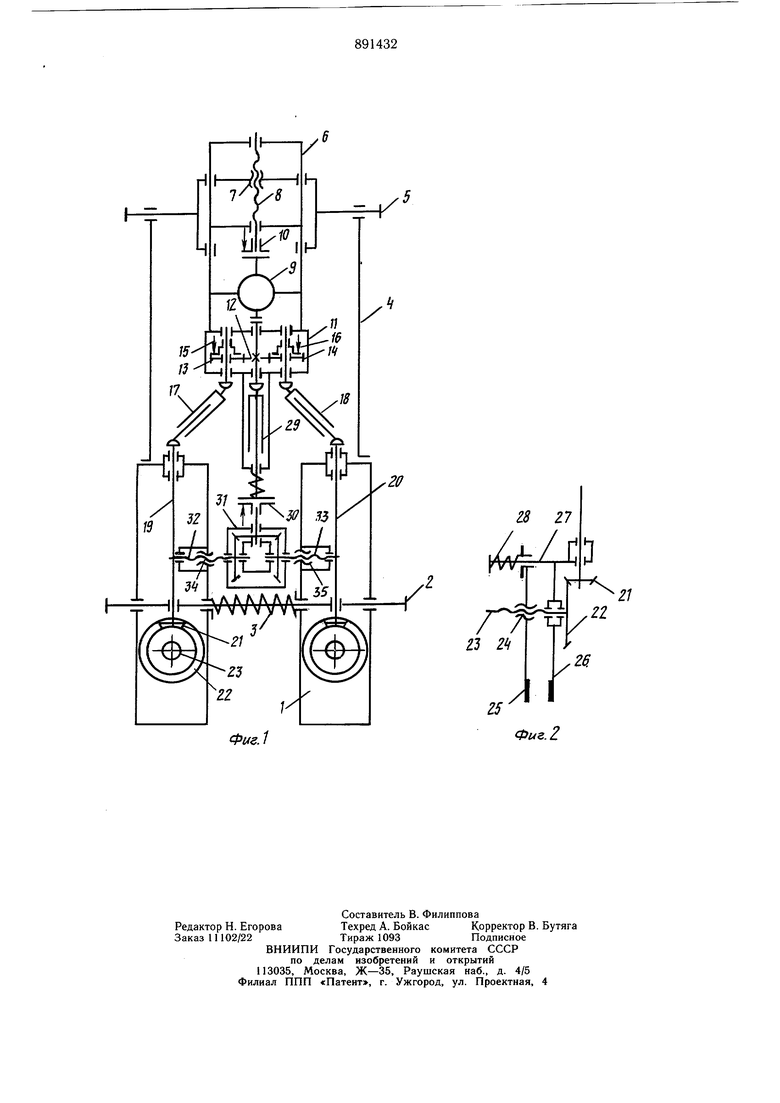
На фиг. 1 изображен предлагаемый захват; на фиг. 2 - механизм зажима деталей.
Захват состоит из двух узлов зажима 1, выполненных с возможностью перемещения вдоль направляющей 2. Между узлами зажима 1 на направляющей 2 установлена пружина 3. Каждый узел зажима 1 прикреплен с помощью тяг 4 и 5 к корпусу 6 с возможностью перемещения относительно последнего в двух взаимно перпендику. лярных направлениях. Тяги 5 образуют поступательные пары с корпусом 6 и вместе с тем жестко связаны с гайкой 7, находящейся в зацеплении с ходовым винтом 8. Винт 8 смонтирован в корпусе 6 и связан с двигателем 9 нормально-разомкнутой
5 управляемой муфтой 10. Второй выходной вал двигателя 9 связан с раздаточным редуктором 11, который содержит центральную 12 и ведомые 13 и 14 шестерни. Крутящий момент с щестерен 13 и 14 на выходные валы редуктора 11 передается через
20 нормально-разомкнутые управляемые муфты 15 и 16, а далее через телескопические карданные валы 17, 18 и валы 19, 20 - на механизмы зажима деталей. В них вращение, получаемое от ведомых 13 и 14 шестерен редуктора 11, посредством конического зацепления 21 ч 22 передается на ходовой винт 23, который зацеплен с гайкой 24, закрепленной в подвижном зажимном элементе 25. На неподвижном зажимном элементе 26 смонтированы шестерня 22 и направляющая 27, которая, в свою очередь, образует поступательную пару с подвижным зажимным элементом 25. На направляющей 27 установлена пружина 28, опертая на подвижный зажимной элемент 25. Выходной вал редуктора 11 с жестко закрепленной центральной щестерней 12 связан через телескопический карданный вал 29 и нормальноразомкнутую управляемую муфту 30 с дифференциальным редуктором 31. Его выходные валы 32 и 33 выполнены в виде ходовых винтов, гайки 34 и 35 которых жестко закреплены в узлах зажима 1.
Захват работает следующим образом.
Подается команда от устройства программного управления на включение двигателя 9 и муфты 10. Начинает вращаться ходовой винт 8, вдоль которого вертикально вниз движется гайка 7, а вместе с ней тяги 5 и 4 и узлы зажима 1. Когда зажимные элементы 25 и 26 входят в зону захвата деталей, подается команда на отключение муфты 10 и включение муфт 15 и 16. Через зацепления 21 и 22 ходовые винты 23 вращаются и зажимные элементы 25 движутся за счет гаек 24 навстречу неподвижным зажимным элементам 26.
После того, как происходит зажим деталей, в работу вступает манипулятор (на чертеже не показан), который перемещает захват с деталями по заданной траектории. В процессе такого переноса устройство программного управления размыкает муфты 15 и 16 и включает муфту 30, в результате чего вращаются ходовые винты 32 и 33. Вдоль них движутся гайки 35 и 34 и вместе
с ними узлы зажима 1 раздвигаются вдоль направляющей 2. По окончании их перемещения детали занимают положение, соответствующее параметрам установочных
баз приспособлений. После загрузки деталей в приспособление устройство программного управления подает команду на реверс двигателя 9 и последовательным переключением соответствующих нормально-разомкнутых муфт 10, 15, 16 и 30 обеспечивает разжим и вывод узлов зажима 1 из зоны взаимодействия с деталями и сближение узлов зажима 1.
Телескопические карданные валы 17, 18 и 29 обеспечивают взаимоперемещение элементов захвата.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 595143, кл. В 25 J 9/00, 1978.
М
Фие.1
4-/
Фиг. 2
