1
Изобретение относится к судостроительной испытательной технике.
Известна установка для гидродинамических испытаний судовых моделей, в которой буксировка моделей производится посредством буксировочной тележки, при этом модель закрепляется к носовому и кормовому ножам.
Недостаток этой установки заключается в больших ее габаритах.
Наиболее близким решением из известных является установка для гидродинамических испытаний судовых моделей, содержашая буксировочное устройство с носовым и кормовым ножами, связанными с приводами их подъема и перемеш,ения, при этом буксировочное устройство включает в себя подвижную в горизонтальных направляюш,их плиту.
Недостаток указанной установки заключается в невозможности проведения гидродинамических испытаний в бассейнах с ограниченным воздушным пространством.
Цель изобретения - обеспечение возможности проведения гидродинамических испытаний в бассейнах с ограниченным воздушным пространством.
Для этого плита снабжена стойкой и обтекателем, в котором телескопически установлен кормовой нож, а привод перемеш,ения кормового ножа выполнен с двумя ходовыми винтами, один из которых установлен вертикально, а другой - горизонтально, причем оба ходовых винта кинематически связаны с приводом подъема и перемеш ения кормового ножа, а на стойке смонтирован механизм стонорения. Кроме того, у такой установки механизм стопорения может быть выполнен с корпусо.м, стаканом с тягой, ходовым винтом с гайкой, распорной пружиной, двуплечим рычагом и зажимом, при этом стакан и ходовой винт с гайкой могут быть расположены в корпусе, распорная пружина может быть установлена между стаканом и ходовым винтом, а носледний может быть связан с приводом нодъема носового ножа, а тягу стакана целесообразно связывать с двуплечим рычагом, причем на конце двуплечего рычага может быть установлен зажим.
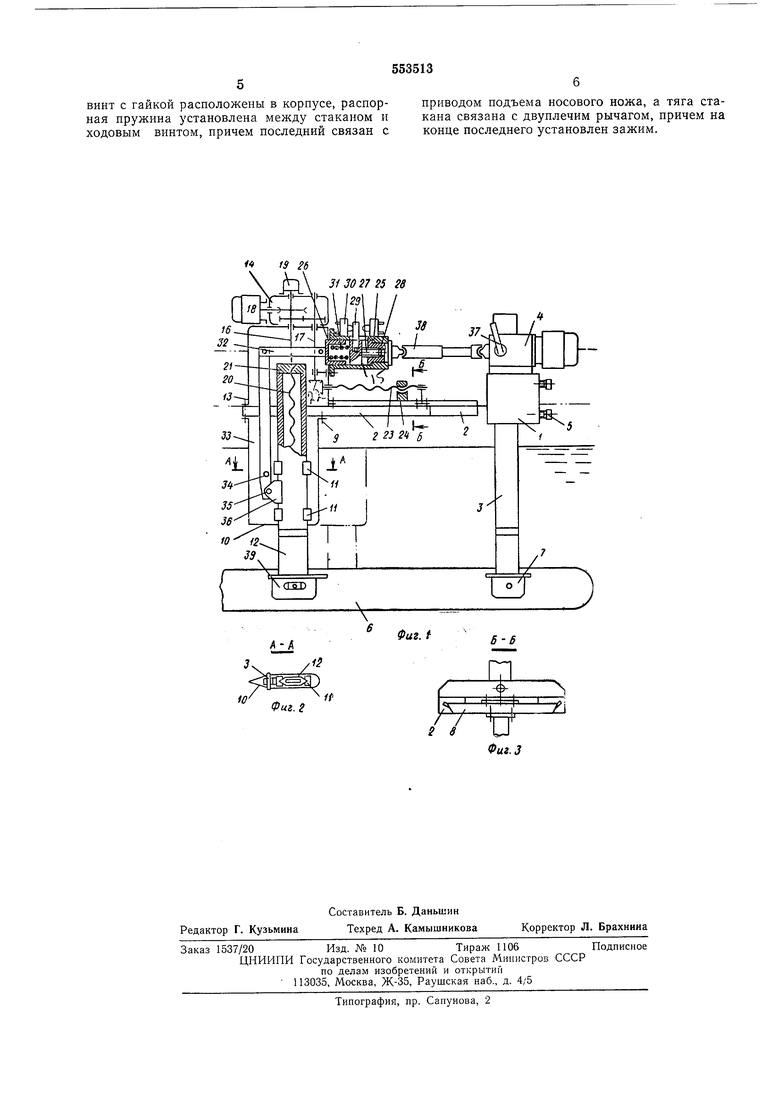
На фиг. 1 схематически изображена описываемая установка; на фиг. 2 и 3 - сечения А-А и Б-Б на фиг. 1.
Описываемая установка содержит опору 1, горизонтальные направляющие 2, закрепленные на буксировочной тележке (на чертел :ах не показана).
В опоре установлен носовой нож 3, который оборудован приводом 4 подъема и опускания ножа, при этом в опоре нож закрепляется стопорами D.
С моделью 6 нож шарнирно связан динамометром 7,
В направляющих подвижно установлена плита 8, к которой связями 9 прикреплен обтекатель 10. Внутри последнего установлены вертикальные направляющие 11, в которых размещен кормовой телескопически выдвижной нож 12.
К плите жестко нрикреплена стойка 13, на которой установлены привод 14 перемещения ножа и механизм 15 его стопорения.
Привод перемещения ножа содержит выходные валы 16 и 17, кинематически связанные с электродвигателем 18 и датчик 19 заглубления ножа. Вал 16 жестко соединен с ходовым винтом 20 вертикального перемещения ножа, взаимодействующим с гайкой 21, закрепленной на ноже.
Вал 17 посредством конической пары колес 22 связан с ходовым винтом 23 горизонтального леремещения ножа, при этом винт взаимодействует с гайкой 24, жестко прикрепленной к направляющим.
Механизм стопорения содержит корпус 25, жестко прикрепленный к стойке.
Внутри корпуса 25 установлен стакан 26 и ходовой винт 27 с гайкой 28, при этом на ходовом винте закреплен упор 29, взаимодействующий с концевыми электровыключателями 30. Между стаканом 26 и винтом 27 установлена распорная пружина 31.
Стакан тягой 32 шарнирно соединен с двуплечим рычагом 33, который осью 34 связан с обтекателем.
К нижнему концу рычага на оси 35 установлен зажим 36, взаимодействующий с ножом.
Привод сна-бжен муфтой переключения 37 и связан с телескопическим карданным валом 38, который вторым своим концом связан с гайкой.
Нож 12 связан с динамометром 39 модели 6, при этом динамометр снабжен плавающим узлом (на чертежах не показан).
Установка работает следующим образом. После задания с помощью привода 4 исходного заглубления модели 6 нож 3 фиксируется в опоре 1 стопорами 5. Привод 4 подъема носового ножа муфтой 37 переключается на режим стопорения ножа 12. Изменение угла атаки модели 6 осуществляется с помощью привода 14, при этом одновременно с вращением винта 20 и подъемом или опусканием кормовой конечности модели 6, кормовой нож на плите 8 перемещается в направляющих 2 за счет вращения винта 23 в гайке 24, обеспечивая необходимое изменение растояния между ножами, причем вал 38 удлиняется или укорачивается и не препятствует этому перемещению. Оба движения взаимосвязаны, что предусмотрено конструкцией привода 14. Регистрация заданного угла атаки модели осуществляется датчиком 19, управляющим через цепь обратной связи исполнительным механизмом привода 14. Различие в пропорциональном синусу угла атаки модели характера изменения расстояния между ножами 3 и 12 при
задании необходимой величины угла и линейным перемещением плиты 8 ножа 12 при помощи привода 14 компенсируется плавающим узлом динамометра 39. После задания угла
атаки модели нижняя часть ножа 12 стопорится в направляющих 11. При этом включается привод 4, который через вал 38 вращает гайку 28. Винт 27 получает от нее поступательное движение и сжимает пружину 31. Усилие от
сжатия пружины передается на рычаг 33, щарнирно связанный с обтекателем 10, трансформируется им и действует на зажим 36, который прижимает нож 12 к направляющим 11 и фиксирует его.
Выключение привода 4 производится автоматически электровыключателями 30.
Применение предлагаемой установки расширяет область экспериментальных исследований гидродинамики судовых моделей за счет того,
что его конструкция позволяет использовать установку в опытовых бассейнах (например, кавитационных, требующих создания вакуума над свободной поверхностью воды и имеющих малые размеры буксировочных тележек), где
с целью сокращения времени проведения и удешевления эксперимента весьма важно иметь минимально возможный объем пространства над свободной поверхностью воды, и в которых по условиям испытаний исключается присутствие на буксировочной тележке обслуживающего персонала; использовать установку для испытаний судовых моделей, существенно отличающихся по длине, так как задание исходного расстояния между ножами
производится простым перемещением опоры 1 ножа 3 в рабочем окне буксировочного устройства.
Формула изобретения
1.Установка для гидродинамических испытаний судовых моделей, содержащая буксировочное устройство с носовым и кормовым ножами, связанными с приводами их подъема и
перемещения, при этом буксировочное устройство включает в себя подвижную в горизонтальных направляющих плиту, отличающаяся тем, что, с целью обеспечения возможности проведения гидродинамических испытаний в бассейнах с ограниченным воздушным пространством, плита снабжена стойкой и обтекателем, в котором телескопически установлен кормовой нож, а привод перемещения кормового ножа выполнен с двумя ходовымя винтами, один из которых установлен вертикально, а другой - горизонтально, причем оба ходовых винта кинематически связаны с приводом подъема и перемещения кормового ножа, а на стойке смонтирован механизм стопорения.
2.Установка по п. 1, отличающаяся тем, что механизм стопорения выполнен с корпусом, стаканом с тягой, ходовым винтом с гайкой, распорной пружиной, двуплечим рычагом и зажимом, при этом стакан и ходовой 5 винт с гайкой расположены в корпусе, распорная пружина установлена между стаканом и ходовым винтом, причем последний связан с 6 приводом подъема носового ножа, а тяга стакана связана с двуплечим рычагом, причем на конце последнего установлен зажим.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гидродинамических испытаний моделей гребных винтов | 1980 |
|
SU898272A1 |
| Устройство для измерения гидродинамических нагрузок на модели гребного винта | 1982 |
|
SU1082672A1 |
| Установка для испытания гребныхВиНТОВ B СВОбОдНОй ВОдЕ | 1979 |
|
SU831659A2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВЫХ ДВИЖИТЕЛЕЙ | 2001 |
|
RU2216476C2 |
| Устройство для раскачивания модели судна | 1981 |
|
SU962774A1 |
| Установка для буксировочных испытаний моделей судов | 1983 |
|
SU1105369A1 |
| Устройство для крепления модели судна к кормовой державке буксировочной тележки | 1976 |
|
SU557280A1 |
| Установка для испытаний моделей судов | 1982 |
|
SU1081063A2 |
| Стенд для исследования влияния зазора между льдом и корпусом судна на его сопротивление движению | 2024 |
|
RU2841316C1 |
| Буксировочное устройство для гидродинамических испытаний моделей судов в открытых водоемах | 1980 |
|
SU933536A1 |
« tS 26
3i 30 27 25 28
10
Фиг. г
