(54) ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ
ПОЛОЖЕНИЯ ОТВАЛА АВТОГРЕЙДЕРА
В ПОПЕРЕЧНОЙ ПЛОСКОСТИ
1
Изобретение Относится к землеройнотранспортным машинам, а именно к системе автоматического управления рабочим органом автогрейдера.
Известно устройство стабилизации рабочего органа, включающее корпус, маятник, подвешенный в корпусе, и гидрораспределитель, взаимодействующий с маятником 1 .
Недостатком устройства является то, что оно не обеспечивает регулирования чувствительности системы.
Известна гидромеханическая система стабилизации положения отвала автогрейдера в поперечной плоскости, включающая корпус, закрепленный на тяговой раме, маятник, подвешенный в корпусе, гидравлический распределитель, узел стопорения маятника с подпружиненным стопором, узел задания угла наклона отвала и блок питания 2.
Недостатком указанной системы является то, что установка требуемого положения отвала относительно горизонта осуществляется поворотом червяка с помощью ручки, а расстопорение маятника производится непосредственным перемещением стопора
узла стопорения маятника и фиксацией его в выдвинутом положении. При этом оператор не имеет возможности дистанционного (из кабины автогрейдера) управления угловым положением отвала и узлом стопорения маятника. Это неудобно при необходимости частых включений и выключений системы и перестановок угла наклона отвала, особенно при работе в неблагоприятных климатических условиях.
Цель изобретения - улучшение условий эксплуатации.
10
Цель достигается тем, что узел стопорения маятника снабжен механизмом дистанционного управления, а узел задания угла наклона отвала выполнен в виде механизма дистанционного управления поворотом корпуса системы. При этом механизм дистанционного управления узлом стопорения маятника выполнен из рычага управления, установленного в кабине автогрейдера и связанного посредством тросика с подпружиненным стопором узла стопорения маятника, а ме20ханизм дистанционного управления поворотом корпуса выполнен из рычага-стрелки, который жестко связан с узлом креп.1ения корпуса к тяговой раме, маховичка, установленного в кабине автогрейдера и связанного посредством тросика с корпусом, который подпружинен относительно тяговой рамы.
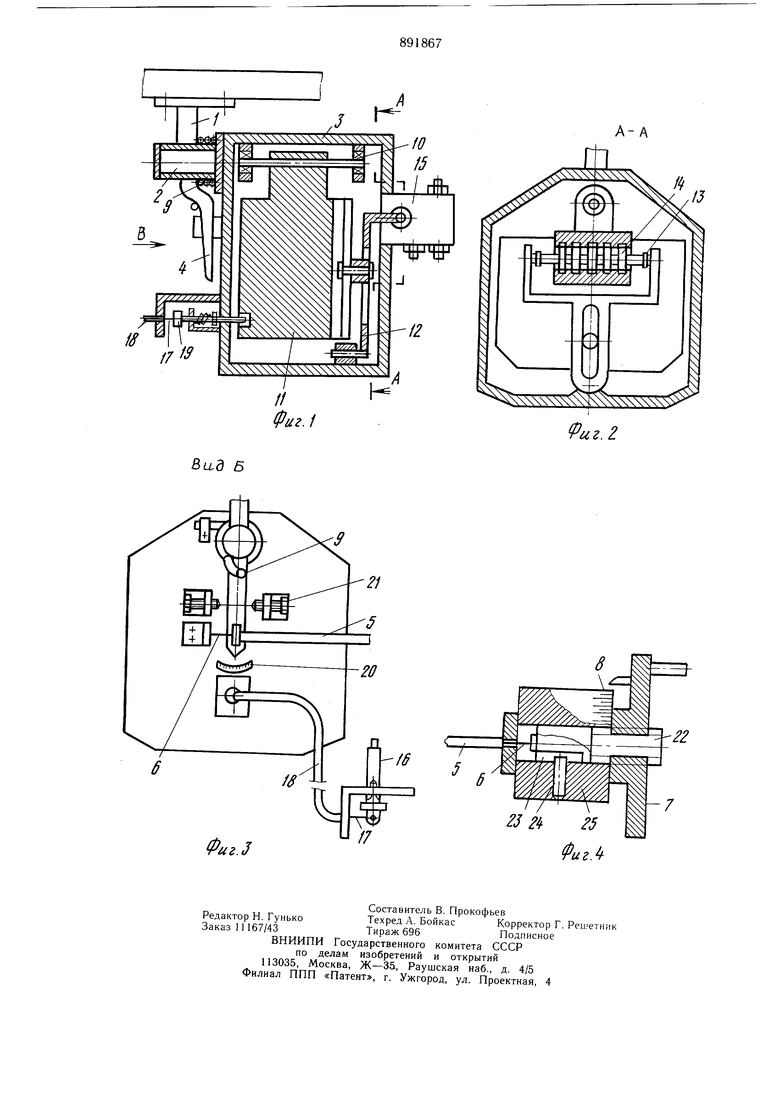
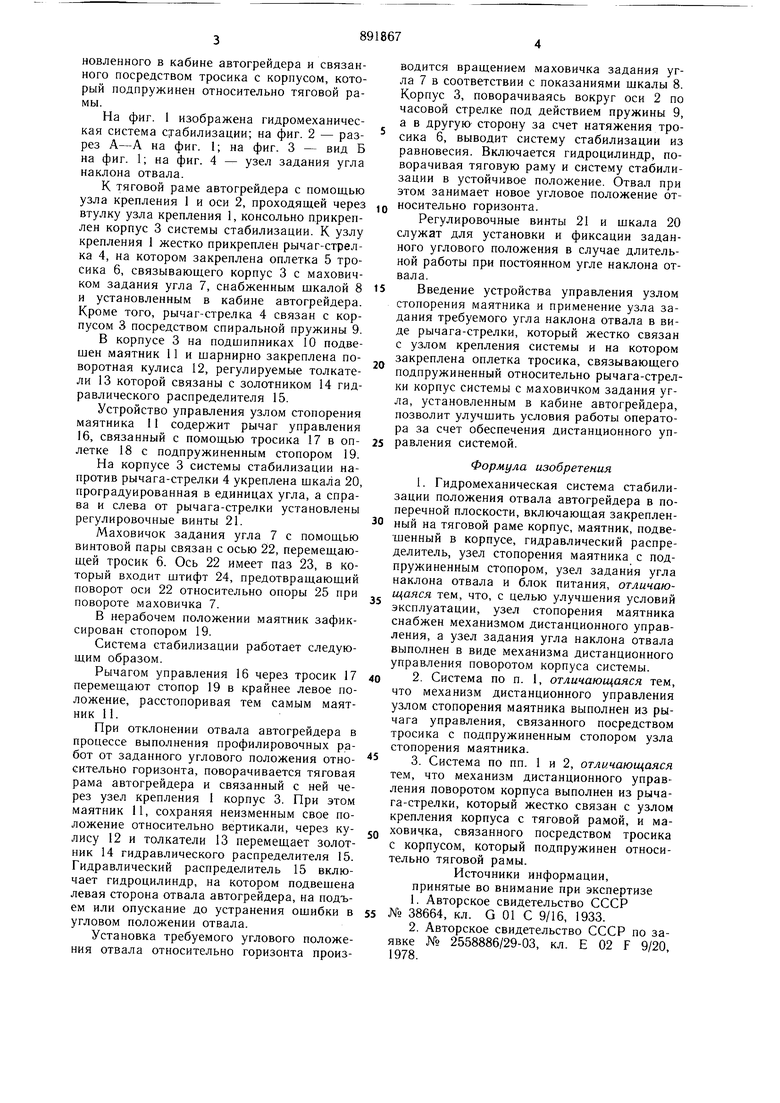
На фиг. 1 изображена гидромеханическая система стабилизации; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - узел задания угла наклона отвала.
К тяговой раме автогрейдера с помощью узла крепления 1 и оси 2, проходящей через втулку узла крепления 1, консольно прикреплен корпус 3 системы стабилизации. К узлу крепления 1 жестко прикреплен рычаг-стрелка 4, на котором закреплена оплетка 5 тросика 6, связывающего корпус 3 с маховичком задания угла 7, снабженным шкалой 8 и установленным в кабине автогрейдера. Кроме того, рычаг-стрелка 4 связан с корпусом 3 посредством спиральной пружины 9.
В корпусе 3 на подщипниках 10 подвешен маятник 11 и шарнирно закреплена поворотная кулиса 12, регулируемые толкатели 13 которой связаны с золотником 14 гидравлического распределителя 15.
Устройство управления узлом стопорения маятника 11 содержит рычаг управления 16, связанный с помощью тросика 17 в оплетке 18 с подпружиненным стопором 19.
На корпусе 3 системы стабилизации напротив рычага-стрелки 4 укреплена щкала 20, проградуированная в единицах угла, а справа и слева от рычага-стрелки установлены регулировочные винты 21.
Маховичок задания угла 7 с помощью винтовой пары связан с осью 22, перемещающей тросик 6. Ось 22 имеет паз 23, в который входит штифт 24, предотвращающий поворот оси 22 относительно опоры 25 при повороте маховичка 7.
В нерабочем положении маятник зафиксирован стопором 19.
Система стабилизации работает следующим образом.
Рычагом управления 16 через тросик 17 перемещают стопор 19 в крайнее левое положение, расстопоривая тем самым маятник 11.
При отклонении отвала автогрейдера в процессе выполнения профилировочных работ от заданного углового положения относительно горизонта, поворачивается тяговая рама автогрейдера и связанный с ней через узел Крепления 1 корпус 3. При этом маятник 11, сохраняя неизменным свое положение относительно вертикали, через кулису 12 и толкатели 13 перемещает золотник 14 гидравлического распределителя 15. Гидравлический распределитель 15 включает гидроцилиндр, на котором подвещена левая сторона отвала автогрейдера, на подъем или опускание до устранения ощибки в угловом положении отвала.
Установка требуемого углового положения отвала относительно горизонта производится вращением маховичка задания угла 7 в соответствии с показаниями шкалы 8. Корпус 3, поворачиваясь вокруг оси 2 по часовой стрелке под действием пружины 9, а в другую сторону за счет натяжения тросика 6, выводит систему стабилизации из равновесия. Включается гидроцилиндр, поворачивая тяговую раму и систему стабилизации в устойчивое положение. Отвал при этом занимает новое угловое положение относительно горизонта.
Регулировочные винты 21 и щкала 20 служат для установки и фиксации заданного углового положения в случае длительной работы при постоянном угле наклона отвала.
Введение устройства управления узлом стопорения маятника и применение узла задания требуемого угла наклона отвала в виде рычага-стрелки, который жестко связан с узлом крепления системы и на котором закреплена оплетка тросика, связывающего подпружиненный относительно рычага-стрелки корпус системы с маховичком задания угла, установленным в кабине автогрейдера, позволит улучшить условия работы оператора за счет обеспечения дистанционного уп5 равления системой.
Формула изобретения
1. Гидромеханическая система стабилизации положения отвала автогрейдера в поперечной плоскости, включающая закрепленный на тяговой раме корпус, маятник, подвешенный в корпусе, гидравлический распределитель, узел стопорения маятника с подпружиненным стопором, узел задания угла наклона отвала и блок питания, отличающаяся тем, что, с целью улучшения условий эксплуатации, узел стопорения маятника снабжен механизмом дистанционного управления, а узел задания угла наклона отвала выполнен в виде механизма дистанционного управления поворотом корпуса системы.
0 2. Система по п. 1, отличающаяся тем, что механизм дистанционного управления узлом стопорения маятника выполнен из рычага управления, связанного посредством тросика с подпружиненным стопором узла стопорения маятника.
3. Система по пп. 1 и 2, отличающаяся тем, что механизм дистанционного управления поворотом корпуса выполнен из рычага-стрелки, который жестко связан с узлом крепления корпуса с тяговой рамой, и маховичка, связанного посредством тросика с корпусом, который подпружинен относительно тяговой рамы.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 5 № 38664, кл. G 01 С 9/16, 1933.
2.Авторское свидетельство СССР по заявке № 2558886/29-03, кл. Е 02 F 9/20, 1978.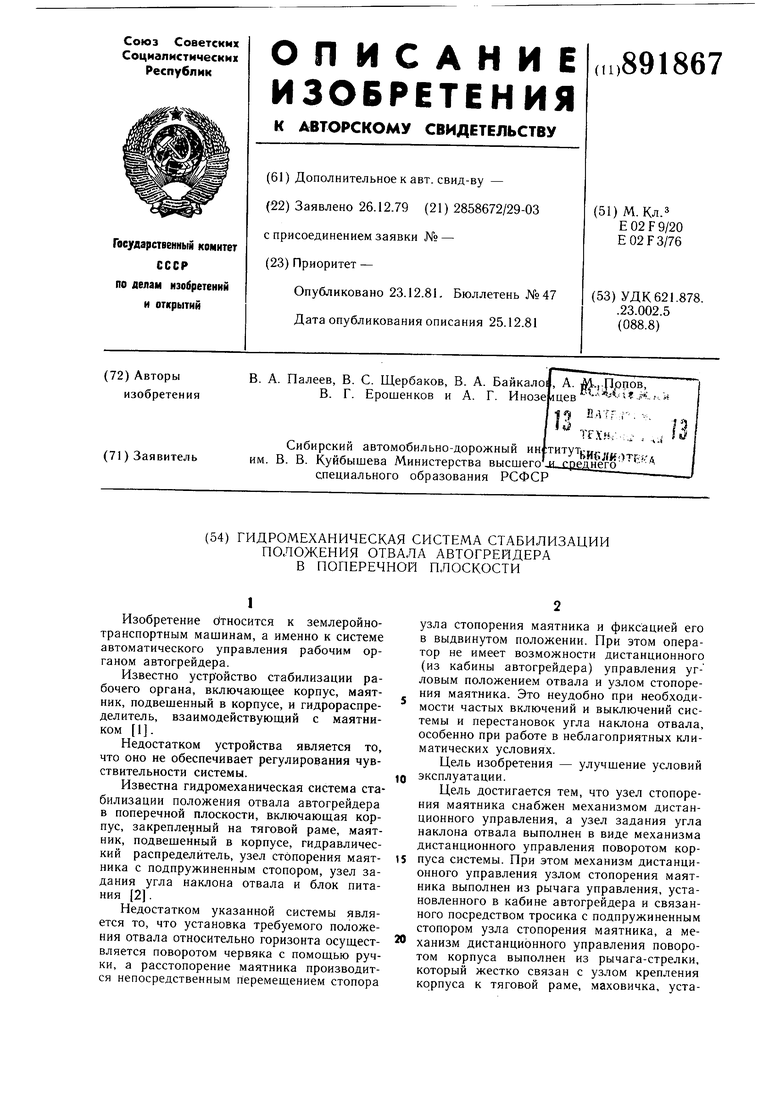
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| Гидравлическая система стабилизации угла наклона отвала автогрейдера в поперечной плоскости | 1977 |
|
SU866075A1 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| Гидромеханическая система стабилизации горизонтального положения рамы дорожно-строительной машины | 1981 |
|
SU1006643A1 |
| Шарнирный узел полноприводного автогрейдера тяжелого типа | 2024 |
|
RU2823972C1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Автогрейдер | 1985 |
|
SU1298312A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЕЖУЩЕЙ КРОМКИ ОТВАЛА АВТОГРЕЙДЕРА | 2011 |
|
RU2478757C2 |