Од Од 4 00
Изобретение относится к автоматизации дорожно-строительных машин и может быть i использовано на машинах комплектов для скоростного строительства автодорог высшей категории и аэродромных покрытий.
Известна система стабилизации поперечного наклона профилировщика для планировки земляного полотна, включающая датчик наклона, сервоклапан пропорционального действия, панель управления с задатчиком и потенциометром и усилительно-преобразовательную электронную аппаратуру 1J.
Однако электронные преобразователи зарекомендовали себя недостаточно надежными в условиях дорожного строительства из-за неблагоприятного воздействия на них пыли, влаги и вибрации.
Наиболее близким к изобретению решением является гидромеханическая система, включающая корпус с чувствительным элементом, распределитель с золотником и узел стопорения с дистанционным управлением 2.
Недостаток известной системы заключается в том, что в ней необходимо преодоление значительных сил трения в местах подвески маятника в корпусе.. Наличие этих сил требует увеличения массы маятника тем большего, чем больше необходимая чувствительность и точность работы машины. Все это снижает надежность машины. J .
Цель изобретения - повышение надежности, а также уменьшение габаритов чувствительного к наклонам элемента и корпуса : системы.
Поставленная цель достигается тем, что гидромеханическая система стабилизации горизонтального положения рамы дорожно-строительной машины, включающая корпус с чувствительным элементом, распределитель с золотником и узел стопорения с дистанционным управлением, чувствительный элемент выполнен в виде соосно установленного с золотником поплавка, а гидромеханическая система снабжена резервуаром, сообщенным с корпусом поплавка, при этом корпус распределителя посредством эластичной мембраны сообщён с корпусом поплавка.
Кроме того, корпус поплавка имеет винт, а поплавок снабжен пружиной, установленной в выполненном в поплавке соосно винту отверстии, при этом пружина связана посредством опорной шай&.1 с золотником распределителя.
При этом золотник распределителя снабжен упорами.
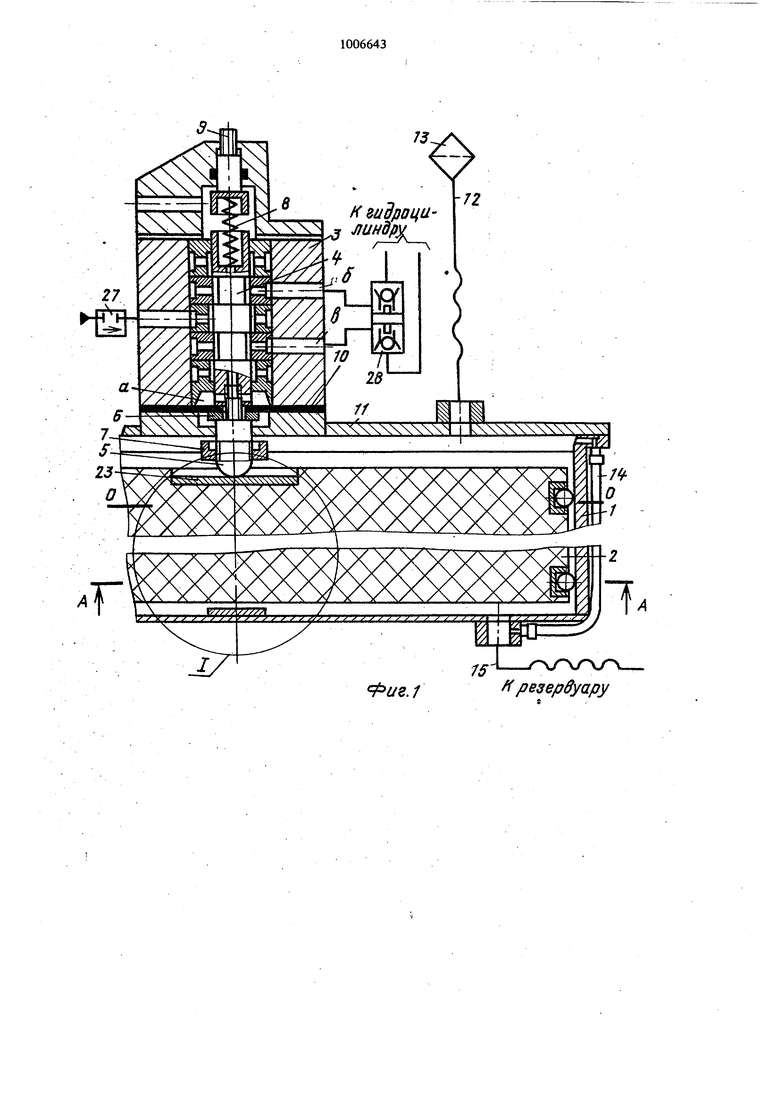
На фиг. 1 и 2 изображена гидромеханическая система; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - уэел 1 на фиг. 1;
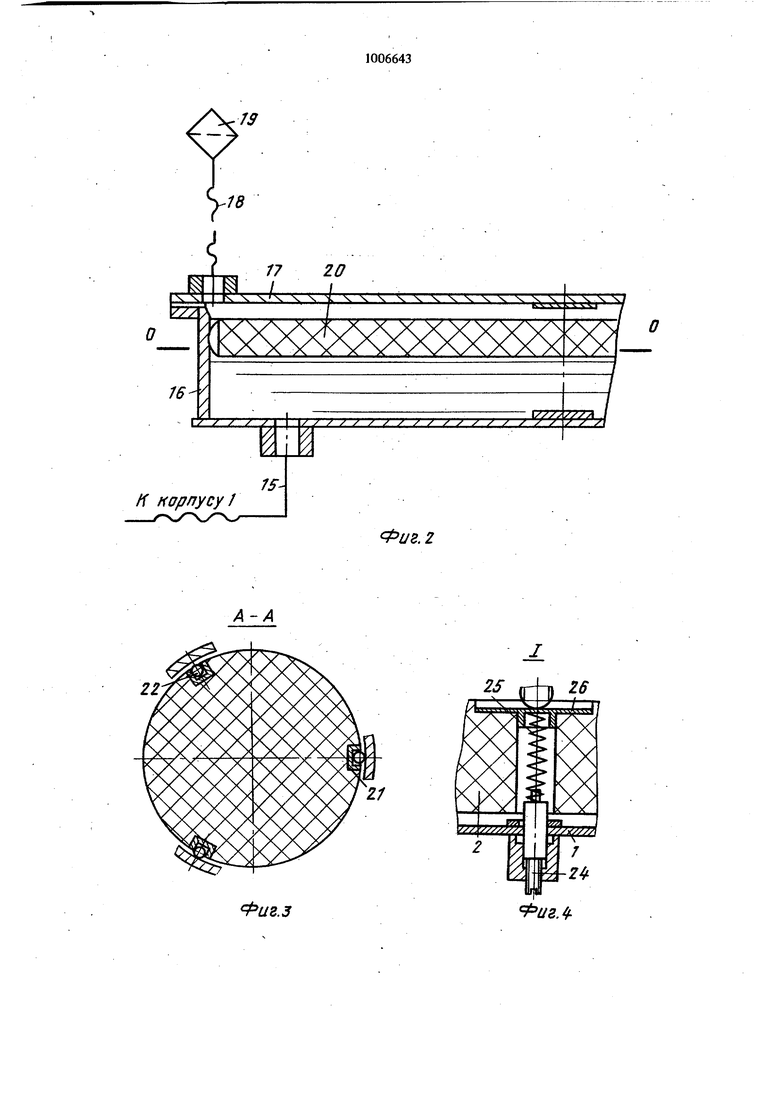
на фиг. 5 - схема работы гидромеханической системы.
Гидромеханическая система стабилизации горизонтального положения рамы дорожностроительной машины включает корпус 1, установленный внутри него поплавок 2 и гидравлический распределитель, содержащий корпус распределителя 3, золотник 4, хвостовик 5 с упорами 6 и 7, .а также пружину 8 с регулировочным винтом 9. Корпус 1 отделен от распределителя 3 эластичной мембраной 10, зажатой между торцом золотника
4и упором 6. К крышке 11 присоединен рукав 12 с воздушным фильтром (сапуном) 13, а корпус 1 снабжен прозрачной трубкой 14 для визуального контроля за уровнем залитой в него жидкости.
Корпус 1 соединен трубопроводом 15 с резервуаром (фиг. 2), включающим корпус 16, крышку 17 с рукавом 18 и воздушным фильтром (сапуном) 19. Резервуар при необходимости может быть снабжен поплавком 20 для гашения колебаний поверхностного уровня залитой в него жидкости.
Поплавок 2 установлен соосно с золотником 4 и выполнен из материала с малым объемным весом, например из пенопласта, или пустотелым, например из конструкционной пластмассы. По крайней мере в двух поперечных сечениях поплавка установлены втулйи 21 и шарики 22 (фиг. 3) для снижения трений при перемещениях поплавка. В верхней части поплавка установлена опорная шайба 23. В центре нижней части корпуса 1 установлен винт 24, взаимодействуюший через пружину 25 и опорную шайбу 26, закрепленную в поплавке 2, с хвостовиком
5золотника 4 гидромеханической системы.
В качестве узла стопорения с дистанционным управлением применен запорный элемент 27, а на выходе к исполнительному гидроцилиндру установлен гидрозамок 28. Машина имеет раму 29, правая сторона рамы 29 может управляться вручную по визуальным наблюдениям оператора или может быть оборудована щуповым датчиком 30 для автоматического управления положением гидроцилиндра 31 относительно положения тросового копира 32, натянутого параллельно строящейся дороге (на фиг. 5 показано поперечное сечение тросового копира). Рабочие органы машины, например фрезы 33 и 34, уст|навливаются специальными гидро-. цилиндрами под нужными углами относительно горизонтально расположенной рамы 29.
Предлагаемая гидромеханическая система позволяет автоматически стабилизировать горизонтальное положение рамы машины без установки копирного троса с аналогичной системой автоматического управления положением шдроципиндра 35 на левой стороне машины. Для этого на правой стороне установлен резервуар 16 и на левой стороне корпус 1 с поплавком и гидравли ческим распределителем, причем последний связан рукавами 36 и 37 с исполнительным гидроцилиндром 35 для выравнивания рамы Гидромеханическая система работает следуюишм образом. Корпус 1 в сборе:.с гищ)авлическим распределителем устанавливают на одной стороне рамы дорожно-строительной машины (или на одной стороне рабочего органа, а резервуар -на другой стороне). Корпусы 1 И 16, соединенные друг с другом трубопроводом 15, заполняют жидкостью, антифризом (уровень жидкости на фиг1 1 и 2 отмечен линией 0-0). Система поплавок 2 - золотник 4 при этом находится в равновесии под действием приложенных к ней следующих сил: а) силы, действующие вниз по оси золотника:усилие пружины 8; сила тяжести (вес) золотника 4; усилие мембраны 10, обусловленное наличием в дренажной магист ли а распределителя избыточного давления; PJ, - сила тяжести (вес) поплавка 2; б) сила, действующая вверх по оси золотника: F. - У.д- - выталкивающая си затопленной под уровень О-О част поплавка, где р - плотность залитой в корпус 1 жи кости; V - затопленный под уровень О-О объем поплавка; g - ускорение свободного падения. В состоянии равновесия имеет место сле дующий баланс сил РЗОЛ- М РП «bb-t В этом положении полости бив распределителя (фиг. 1) отсоединены поясками золотника от источника давления, настройка на это положение производится регулировоч34ным винтом 9. В случаях изменения положения уровня жидкости в корпусе 1 меняется выталкивающая сила в связи с изменением затопленного объема поплавка (т. е. .). При этом в переходнъш период необходимо учитывать еще.и силу трения поплавка 1 с золотником 4 и жесткость 10. Таким образом, отклонение по высоте одной и:: сторон рамы дорожно-строительной машины при ее движении, например в случае наезда машины на возвышенности Или при ее попадании в углублении дороги, приводит к изменению уровня жидкости в корпусе 1, что меняет баланс сил в связи с изменением выталкивающей силы поплавка. При этом . золотник 1 смещается, а исполнительный гидроцилиндр отрабатывает на опускание или подъем той стороны рамы машины, где установлен корпус -1 рамы машины в сборе с распределителем, что приводит к сохранению горизонтального положения рамы машины. - Если правая сторона рамы вместе с резервуаром поднимается по высоте копирного троса 32, в корпусе 1 дополнительно затоплен объем поплаЗка между плоскостями О-О и Oi -Oi, что увеличивает его выталкивающую силу Fg|,(-(- и приводит к смещению золотника на подъем левой стороны рамы гидроцилинщюм 35. При опускании же правой стороны золотник распределителя смещается вниз и гидроцилиндр опускает правую сторону рамы до положения равновесия, т. е. когда уровень жидкости совпадает с плоскостью О-0. В случаях подъема или опускания левой стороны рамы при движении машины по неровностям исполнительный гидроцнлиндр 35 аналогичным образом также отрабатывает таким образом, что предохранительное положение рамы сохраняется., Использование изобретения позволяет упростить конструкцию гидромеханической системы, повысить точность и надежность ее работы. Эффект упрощения конструкции системы связан с наличием в ней прость|х элементов (поплавок, корпус, сапун, пружина) и осуществлением непосредственного (без использования электронно-преобразовательного передаточного звена) перемещения золотника оясппецеяителя.
f( резервуару
./ К идроца L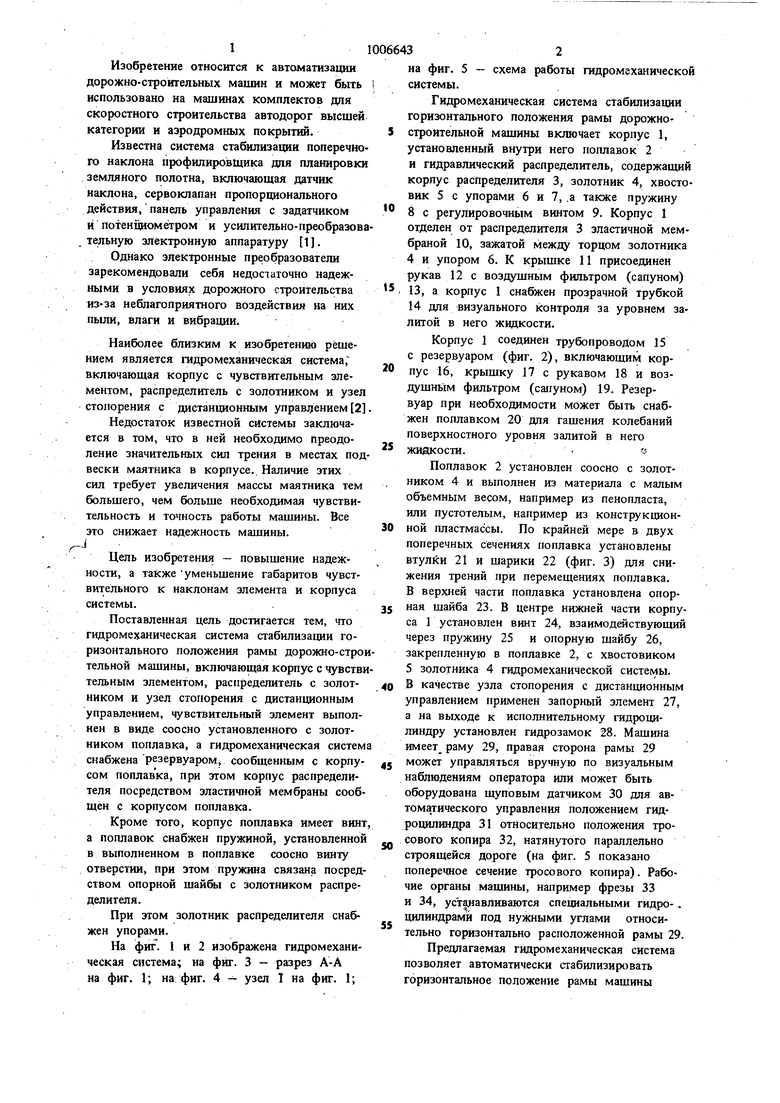

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромеханическая система управленияпОлОжЕНиЕМ РАбОчЕгО ОРгАНА дОРОжНО- СТРОиТЕльНОй МАшиНы | 1979 |
|
SU831914A1 |
| Гидромеханическая система стабилизации положения отвала автогрейдера в поперечной плоскости | 1979 |
|
SU891867A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| Поплавковая энергетическая установка | 1990 |
|
SU1786279A1 |
| Гидробак | 1989 |
|
SU1634848A1 |
| Гидравлическая система стабилизации угла наклона отвала автогрейдера в поперечной плоскости | 1977 |
|
SU866075A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| Датчик крена автомата-стабилизатора крутосклонной машины | 1988 |
|
SU1572837A1 |
| Гидромеханическая система управления отвала бульдозера | 1981 |
|
SU1094917A1 |
1. ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ РАМЫ ДОЮЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ, включающая корпус с чувствительным элементом, распределитель с золотником и узел стопорения с дистанционным управлением, отличающаяся тем, что, с целью повышения надежности, чувствительный элемент выполнен в виде соосно установленного с золотником поплавка, а гидромеханическая система снабжена резервуаром, сообщенным с корпусом поплавка, при этом корпус распределителя посредством эластичной мембраны сообщен с корпусом поплавка. 2. Система по п. 1, о т л и ч а ю щ ая с я тем, что корпус поплавка имеет винт, а поплавок снабжен пружиной, установленной в выполненном в поплавке соосно винту отверстии, при этом прухина связана посредством опорной щайбы с золотником рас§ пределителя. 3. Система по Ш1.1и2, отличающ а. я с я тем, «по золотиик распределителя снабжен упорами.
22
Фиг.з
I
игл
О)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., ЦНИИТЭстроймаш | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ УТИЛИЗАЦИИ НЕФТЕЗАВОДСКИХ ФАКЕЛЬНЫХ ГАЗОВ | 2013 |
|
RU2558886C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
