(54) ГИДРОСИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗИРОВАННОР КРЕПЬЮ
1
Изобретение относится к машиностроительной гидравлике, а именно к гидросистемам управления механизированными крепями, и может найти применение в горной промышленности.
Известна гидросистема управления механизированной крепью, содержащая пульт управления с датчиками давления и секцию, оснащенную гидроцилиндром стойки, гидродомкратом передвижения конвейера и цилиндром-дозатором с вспомогательной и рабочей полостью, причем последняя сообщена с бесштоковой полостью гидродомкрата гидролинией с установленным в ней гидрозамком и с магистралью зарядки - гидролинией с обратным клапаном, а бесштоковая полость гидродомкрата дополнительно сообщена с магистралью зарядки гидролинией G последовательно установленными гидрозамком и обратным клапаном, в гидролинии между бесщтоковой полостью гидродомкрата и рабочей полостью цилиндрадозатора установлен дополнительный обратный клапан 1.
Недостатком известной гидросистемы является невозможность точного контроля за
подготовкой к перемещению конвейера и его перемещением на забой.
Цель изобретения - обеспечение возможности контроля за перемещением конвейера при безлюдной выемке.
Указанная цель достигается тем, что гидросистема выполнена, по меньшей мере, из двух секций, при этом каждая секция снабжена двумя клапанами с толкателями, взаимодействующими с поршнем цилиндра10 дозатора, причем на последней от пульта управления секции надклапанная полость одного из клапанов соединена с рабочей полостью, а надклапанная полость другого клапана соединена с вспомогательной полостью, при этом подклапанные полости
15 клапанов каждой секции соединены с надклапанными полостями соответствующих клапанов смежной секции, а подклапанные полости клапанов первой от пульта управления секции соединены с датчиками давления.
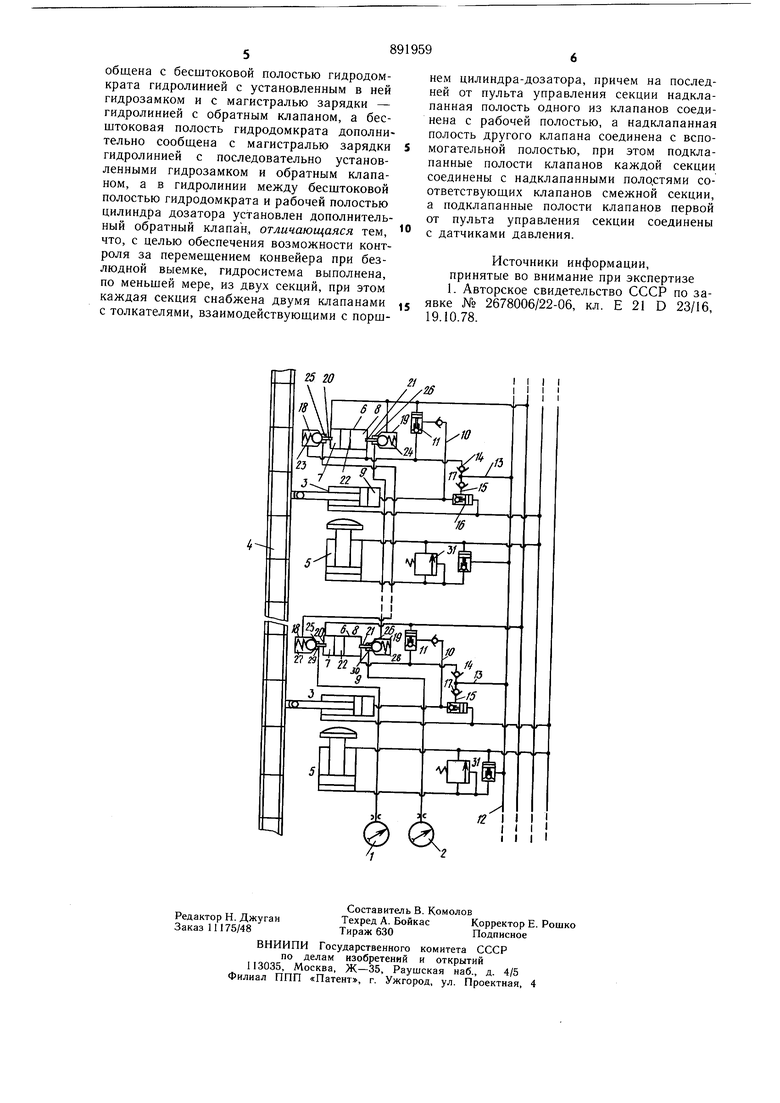
На чертеже представлена принципиальная схема гидросистемы управления механизированной крепью.
Гидросистема содержит пульт управления с датчиками 1 и 2 давления, гидродомкрат 3 передвижения конвейера 4, гидроцилиндры 5 стойки, цилиндры-дозаторы 6 с вспомогательными 7 и рабочими 8 полостями. Рабочая полость 8 сообщена с бесштоковой полостью 9 гидродомкрата 3 передвижения конвейера 4 гидролинией 10 с установленными в ней гидрозамком 11 и с магистралью 12 зарядки - гидролинией 13 с обратным клапаном 14. Бесштоковая полость 9 гидродомкрата 3 передвижения конвейера 4 дополнительно сообщена с магистралью 12 зарядки гидролинией 15 с последовательно установленными гидрозамком 16 и обратным клапаном 17.
Гидросистема выполнена, по меньщей мере, из двух секций, при этом каждая секция снабжена двумя клапанами 18 и 19 с толкателями 20 и 21, взаимодействующими с порщнем 22 цилиндра-дозатора 6, причем на последней от пульта управления секции надклапанная полость 23 клапана 18 соединена с рабочей полостью 8„ а надклапанная полость 24 клапана 19 соединена с вспомогательной полостью 7, при этом подклапанные полости 25 и 26 клапанов 18 и 19 каждой секции соединены с надклапанными полостями 27 и 28 соответствующих клапанов 18 и 19 смежной секции. а подклапанные полости 29 и 30 первой от пульта управления секции соединены с датчиками 1 и 2 давления. Гидросистема имеет также предохранительные клапаны 31.
Гидросистема работает следующим образом.
При подаче оператором управляющим комплексом рабочей жидкости в магистраль 12 зарядки рабочая жидкость поступает в гидроцилиндры 5 стоек, распирая их между кровлей и почвой лавы. Одновременно жидкость из магистрали 12 зарядки по гидролиниям 13 через обратные клапаны 14 поступает в рабочие полости 8 цилиндров-дозаторов 6, перемещая поршни 22 в крайнее положение, чем подготавливается щаг подвигания комплекса. Кроме того, рабочая жидкость из рабочей полости 8 цилиндра-дозатора 6 последней от пульта управления секции поступает в надклапанную полость 23 клапана 18.
Вытесняемая поршнями 22 из вспомогательных полостей 7 рабочая жидкость поступает на слив. При этом гидрозамки 11 заперты и рабочая жидкость в гидродомкраты 3 передвижения конвейера 4 не поступает.
При достижении поршнями 22 своего крайнего положения они, воздействуя на толкатели 20, открывают клапаны 18 и рабочая жидкость из надклапанной полости 23 клапана 18 последней от пульта управления секции проходит через открытый клапан 18 в накладную полость 27 клапана
18следующей секции. Если клапан 18 этой секции открыт, рабочая жидкость проходит к клапану 18 следующей секции и т. д., пока с первой от пульта управления секции не поступит в датчик 1 давления на пульте
управления. Если хотя бы на одной из секций поршень 22 не переместится в свое крайнее положение и не откроет клапан 18, сигнал к датчику 1 давления не пройдет. По поступившему сигналу оператор точно определяет когда комплекс подготовлен к подвиганию.
После того, как вынут уголь из забоя на глубину заходки, осуществляют передвижение комплекса.
Сначала перемещают конвейер 4, для чего рабочую жидкость под давлением подают во вспомогательные полости 7 цилиндровдозаторов 6 и к надклапанной полости 24 клапана 19 последней от пульта управления секции. Одновременно рабочая жидкость поступает в гидрозамки 11 и открывает их.
Вытесняемая из рабочих полостей 8 порщнями 22 рабочая жидкость через открытые гидрозамки 11 по гидролиниям 10 поступает в бесщтоковые полости 9 гидродомкратов 3, тем самым обеспечивается передвижение конвейера 4.
При достижении поршнями 22 своего крайнего положения они, воздействуя на толкатели 21, открывают клапаны 19 и рабочая жидкость из надклапанной полости 24 клапана 19 последней от пульта управле. ния секции проходит через открытый клапан 19 в надклапанную полость 28 клапана
19следующей секции и, если клапан 19 этой секции открыт, рабочая жидкость проходит к клапану 19 следующей секции и т. д., пока не поступит в датчик 2 давления на пульте управления.
Если хотя бы на одной из секций поршень 22 не переместится в свое крайнее положение и не откроет клапан 19, сигнал к датчику 2 давления не пройдет.
По поступившему сигналу оператор точно определяет момент когда закончилось передвижение конвейера 4. Далее происходит подтягивание гидроцилиндров 5 стоек к конвейеру 4, а рабочую жидкость подают под давлением в магистраль -12 зарядки и
5 цикл повторяется.
Изобретение позволяет производить контроль за перемещением конвейера при безлюдной выемке.
50Формула изобретения
Гидросистема управления механизированной крепью, содержащая пульт управления с датчиками давления и секцию, оснащенную гидроцилиндром стойки, гидро домкратом передвижения конвейера и цилиндром-дозатором с вспомогательной и рабочей полостями, причем последняя со
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления механизированной крепью | 1978 |
|
SU730970A1 |
| Гидросистема управления механизированной крепью | 1980 |
|
SU949198A1 |
| Гидросистема управления механизированнойКРЕпью | 1979 |
|
SU821705A1 |
| Гидросистема управления многосекционной механизированной крепью | 1980 |
|
SU969981A1 |
| Секция механизированной шахтной крепи | 1980 |
|
SU939779A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| Гидросистема механизированнойшАХТНОй КРЕпи | 1979 |
|
SU808665A1 |
| Гидросистема механизированной крепи | 1981 |
|
SU1049671A1 |
| Устройство для автоматического управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1291038A1 |
| Механизированная крепь | 1982 |
|
SU1153079A1 |
