При коррекции положения управляемых колес трехпозиционный переключакщий гидрораспределитель 5 выполняет функцию гидроэамка, В этом случае сигнал на выходе регулятора 6 в каждый момент времени соответствует величине
1
Изобретение относитсй к сельскохозяйственному машиностроению, в частности к устройствам для атвома- тического управления движением самоходных сельскохозяйственных машин.
Цель изобретения - повышение точности работы устройства в реж1ме ручной коррекции положения управляемых колес.
На чертеже изображена принципиальная схема устройства для автоматического управления самоходной машиной с задней управляемой осью
Датчик 1 с помощью тяги 2 и дифференциального рычага 3 кинематическ связан с гидроци-пиндром 4 и трехпози ционным гидрораспределителем 5, входящим в состав регулятора 6. Гидро- распределитель 5 гидравлически связа входной гидролинией 7 с насосом 8, выходной гидролинией 9 - с входом (напорной гидролинией) гидроусилителя 10 руля, гидролинией 11 - с што- ковой полостью гидроцилиндра 4 регулятора 6 и гидролинией 12 - с выходной гидролинией 13 переключающего гидрораспределителя 14 и с одной из входных гидролиний гидрозамка 15. Бесштоковая полость гидроцилиндра 4 соединена гидролинией 16 регулятора 6 с входной гидролинией 17 переключающего гидрораспределителя 14 и второй гидролинией гидрозамка 15. Полости гидроцилиндра 18 управляемых колес связаны с выходными гидролиниями гидрозамка 15 и надклапанными полостями переключающего гидрораспределителя 14. Подклапанные полости последнего связаны гидролкниями 19 и 20 с гидроусилителем 10 руля, а его золотник по торцам снабжен на- -жимными штоками.
рассогласования, замеряемого датчиком 1. В момент перехода на автоматический режим этот сигнал совпадает по величине и знаку с сигналом, необходимым для управления движением .агрегата, 1 ил.
5
5
0
5
0
Гидроусилитель 10 руля представляет собой гидрообъемный рулевой механизм, входным воздействием которого является угол поворота рулевого штурвала; а выходным - объем рабочей жидкости, направляемый в грвдроцилиндр 18 управляемых колес.
В исходном положении датчик 1 неподвижен. Зо-.отник гидрораспределителя 5 находится в средней позиции, соединяя гидролинии 7 и 9, в резуль-. тате чего рабочая жидкость нагнетается насосом 8 в сливную магистраль 9 и далее в бак„ Поршень гидроцилиндра 4 находится в положении, соответствующем занимаемому датчиком 1. Золотник переключающего гидрораспределителя 14 занимает среднюю позицию. Обратные клапаны гидрораспределителя 14 и гидрозамка 15 заперты. Поршень пщроцилиндра 18 находится в положении, соответствующем занимаемому поршнем гидроцилиндра 4,
Устройство работает следующим образом.
В режиме автоматического вождения датчик 1, отклоняясь от среднего положения, например, вправо, воздействует через элементы 2 и 3 кинематической связи на гидрораспределитель 5, который направляет рабочую жидкость в штоковую полость гидроцилиндра 4, а из бесштоковой полости по гидролинии 16 регулятора 6 - в под- клапанную полость гидрозамка 15. Под давлением жидкости гидрозамок 15 отпирается, пропуская жидкость из гидролинии 16 в бесштоковую полость гидроцилиндра 18, поршень которого при этом перемещается вправо, вытесняя рггбочую жидкость из штсковой полости в гкдролинию 12, из которой жндкость поступает по каналам гидрораспределителя 5 в сливную гидролинию 9 и по сливной гидрйлинии гидроусилителя 10 руля - в бак. Один из обратных клапа.нов гидрозамка 15 открывается рабочим давлением, другой - штоком поршня гидрозамка 15. Вследствие перемещения поршня гидроцилиндра 4 смещается ось вращения элемента 3, золотник гидрораспределителя 5 возвращается в среднюю позицию и подача рабочей жидкости в гидроциливдр 4 прекращается. При этом прекращается и перемещение поршня гидроцилиндра 18. Таким образом, перемещение поршня гидроцилиндра 18 оказывается пропорциональным отклонению датчика 1. В режиме автоматического вождения золотник переключающего гидрораспределителя 14 находится в средней позиции, а обратные клапаны заперты.
При ручной корректировке положения управляемых колес с помощью гидроусилителя 10 руля осуществляется перераспределение объемов рабочей жидкости в полостях гидроцилиндра 18. В этом случае повышается давление в одной из гидролиний гидроусилителя 10 руля и в связанной с ней торцовой подклапанной полости переключающего гидрораспределителя 14, золотник которого, смещаясь в одну из крайних позиций, замыкает между собой гидролинии 17 и 13, по которым осуществляется перераспределение объемов рабочей жидкости в гидроцилиндре 4 при наличии воздействия со стороны датчика 1 на золотник гидрораспределителя 5. Гидрораспределитель 14 одновременно выполняет функцию гидрозамка, который открывается перепадом давления в гидролиниях 19 и 20 гидроусилителя 10 руля, пропуская жидкость в соответствующую полость гидроцилиндра 18, перемещается, вытесняя жидкость из другой полости через открытый клапан гидрораспределителя 14 и гидролинию гидроусилителя 10 руля в сливную гид- ролинию и далее в бак. Обратные клапаны гидрозамка 15 заперты
Редактор М.Бланар
10
J5
20
25
30
35
40
45
50
В результате отсл цилиндром 4 регулято датчика 1 в режиме р положения гидроцилин мых колес сигнал на тора 6 в каждый моме ответствует величине замеряемого датчиком рехода на автоматиче совпадает по величин налом, необходимым дл движением агрегата.
Формула изо
Устройство для ав управления самоходной ственной машиной, сод кинематически связан пределителем и гидро лятора, гидроусилител цилиндр управляемых к ных гидролиниями, и г личающееся т повышения точности ра ручной коррекции поло мых колес, оно снабже ляемым трехпозиционны гидрораспределителем рого снабжен нажимным торцы гидрораспредели в виде обратных клапа ностью взаимодействия кажимными штоками зол родклапанные полости нов гидрораспределите ролиниями с гидроусил надклапанные полости гидроцилиндра управля вход и выход - с соот гидролиниями регулято ком, входные полости динены с соответствую ниями регулятора, а в лостями гидроцилиндра колес, при этом входн гидроусилителя руля с ответствующей гидроли а выходная - через ги ной линией регулятора
Составитель С.Заруцкий
Техред И,Попович Корректор Т.Колб
7922/1
Тираж 63gПодписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
0
5
0
5
0
5
0
5
0
В результате отслеживания гидроцилиндром 4 регулятора 6 положения датчика 1 в режиме ручной коррекции положения гидроцилиндра 10 управляв- мых колес сигнал на выходе с регулятора 6 в каждый момент времени соответствует величине рассогласования, замеряемого датчиком 1. В момент перехода на автоматический режим он совпадает по величине и знаку с сигналом, необходимым для управления движением агрегата.
Формула изобретения
Устройство для автоматического управления самоходной сельскохозяйственной машиной, содержащее датчик, кинематически связанный с гидрораспределителем и гидроцилиндром регулятора, гидроусилитель руля и гидроцилиндр управляемых колес, соединенных гидролиниями, и гидронасос, отличающееся тем, что, с целью повышения точности работы в режиме ручной коррекции положения управляемых колес, оно снабжено гидроуправ- ляемым трехпозиционным переключающим гидрораспределителем, золотник которого снабжен нажимными штоками, а торцы гидрораспределителя выполнены в виде обратных клапанов с возможностью взаимодействия последних с кажимными штоками золотника, при этом родклапанные полости обратных клапанов гидрораспределителя связаны гидролиниями с гидроусилителем руля, надклапанные полости - с полостями гидроцилиндра управляемых колес, а вход и выход - с соответствующими гидролиниями регулятора и гнчрозам- ком, входные полости которого соединены с соответствующими гидролиниями регулятора, а выходные - с полостями гидроцилиндра управляемых колес, при этом входная гидролиния гидроусилителя руля соединена с соответствующей гидролинией регулятора, а выходная - через гидронасос с входной линией регулятора.
аруцкий
4/5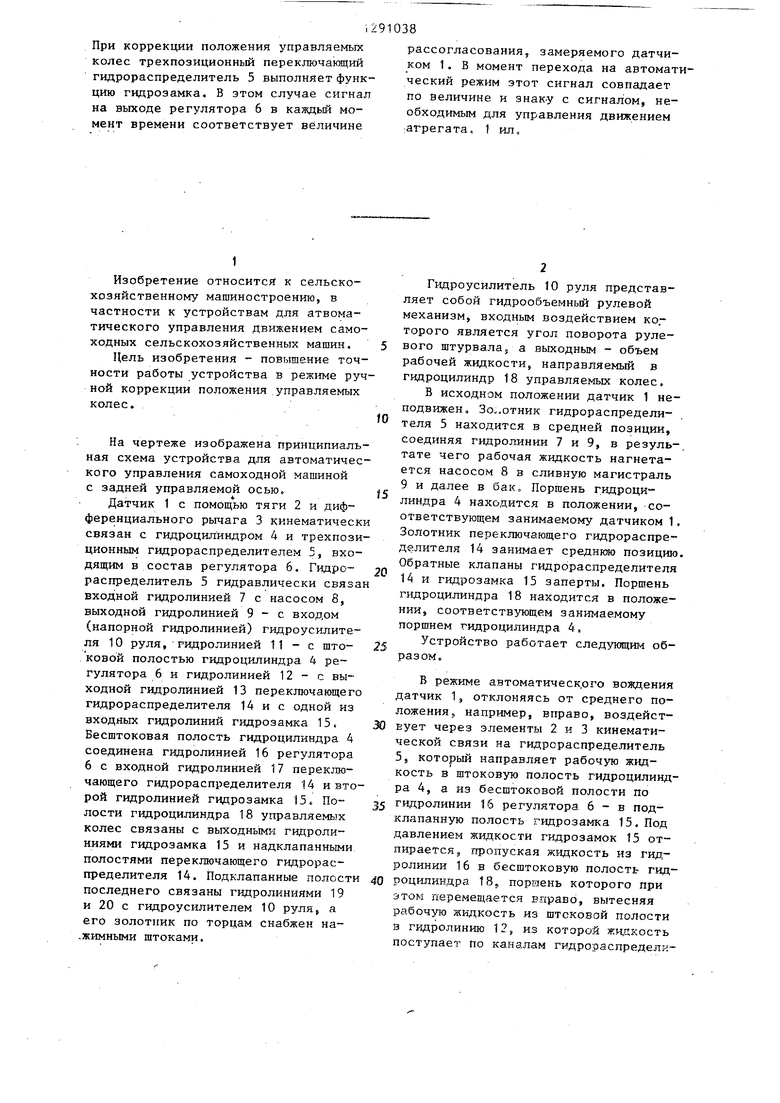
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления самоходной сельскохозяйственной машиной | 1979 |
|
SU869594A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА ПЛАТФОРМЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2014 |
|
RU2583820C1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1635918A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Многозвенная самоходная машина с комбинированной трансмиссией | 1990 |
|
SU1729839A1 |
| Гидромеханическая система для автоматического и ручного управления самоходной сельскохозяйственной машиной по контрастному следу | 1984 |
|
SU1166689A1 |
| ПЛУЖНЫЙ СНЕГООЧИСТИТЕЛЬ | 1991 |
|
RU2022079C1 |
Изобретение относится к области сельскохозяйственного машиностроения. Цель изобретения - повышение точности работы устройства в режиме ручной коррекции положения управляемых колес . Устройство содержит датчик 1, трехпозиционный переключающий гидрораспределитель 5, гидроусилитель 10 руля, гидроцилиндр 18 управляемых колес, регулятор 6 и гидрозамок 15. Л
| Устройство для управления самоходной сельскохозяйственной машиной | 1979 |
|
SU869594A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
