(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ТОЧЕК ОСТАНОВКИ ШАЛОПОДБИВОЧШХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СЕРЕДИНЫ ШПАЛЬНОЙ НАКЛАДКИ И ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ШПАЛЬНОЙ НАКЛАДКИ | 1998 |
|
RU2153549C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК ОБНАРУЖЕНИЯ ШПАЛЬНОЙ НАКЛАДКИ | 1998 |
|
RU2151377C1 |
| УПРАВЛЯЕМАЯ ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2011 |
|
RU2554205C2 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ПУТЕВОЙ МАШИНЫ | 1998 |
|
RU2144966C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА ШПАЛОПОДБИВОЧНОЙ МАШИНЫ В ЗАДАННЫХ ТОЧКАХ ПУТИ | 1969 |
|
SU246563A1 |
| Устройство для оповещения о приближении поезда | 1987 |
|
SU1444217A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ШПАЛОПОДБИВОЧНЫХ МАШИН | 2018 |
|
RU2704764C1 |
| Способ определения расстояний между шпалами рельсового пути | 2019 |
|
RU2703802C1 |
| ПУТЕВОЙ ДАТЧИК | 1995 |
|
RU2084363C1 |

I
Изобретение относится к транспорту и может быть использовано при строительстве и текущем содержании железнодорожного пути в системах автоматического управления рабочими органами путевых машин цикличного действия при осуществлении ими процесса подбивки или рихтовки пути.
Известно устройство дпя автоматического определения точек остановки шпалоподбивочных машин, содержащее датчик подкладки, соединенный с генератором, усилитель, связанный .с детектором, триггер с выходным блоком и блок питания ij.
Известное устройство не обеспечивает обнаружение шпал при расположении чувствительного органа вьш1е 120 ми от них, что не позволяет работать на путях с балластом, засыпанным под головку рельса и вьшзе.Кроме того, точность обнаружения шпал недостаточна и зависит от скорости движения машины и температуры окружающей среда. Устройство допускает Ложные срабатывания на стыковых креплениях ж елезнодорожного пути.
Цель изобретения - повыгаение надежности работы устройства.
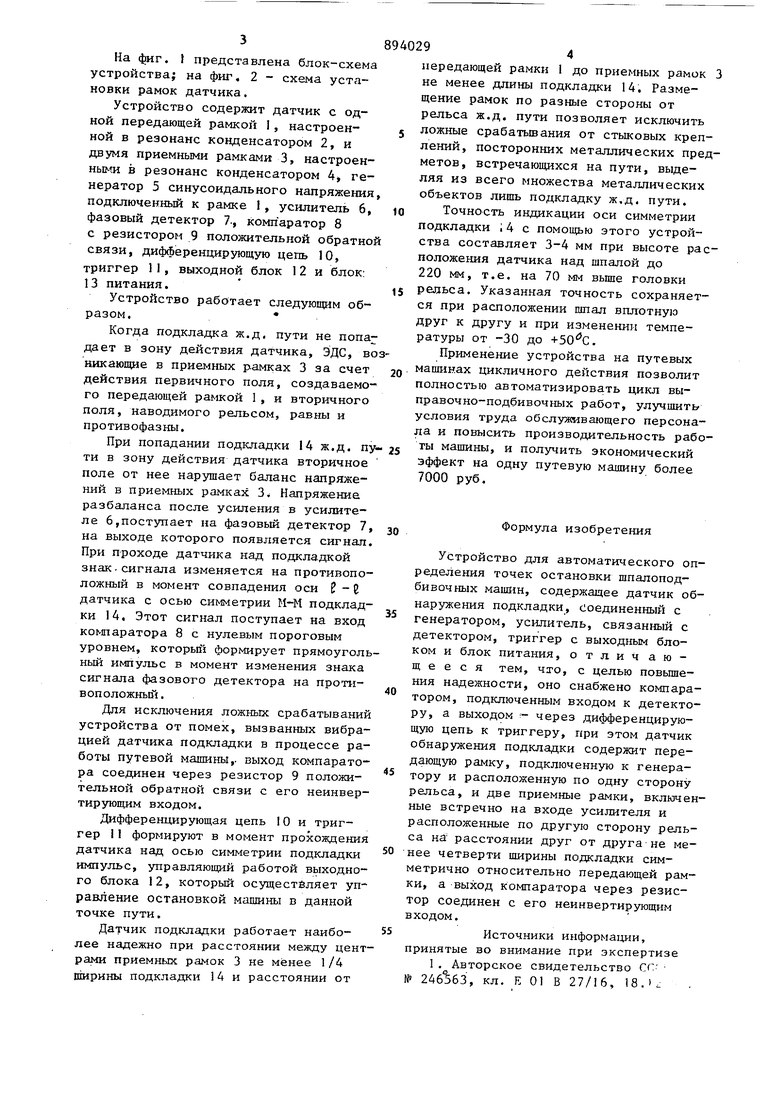
Поставленная цель достигается тем, что устройство снабжено компаратором, подключенным входом к детекто10ру, а выходом - через дифференцирующую цепь к триггеру, при зтом датчик обнаружения подкладки содержит передающую рамку, подключенную к генератору и расположенную по одну сто1$рону рельса, и две приемные рамки, включенные встречно на входе усилителя и расположенные по другую сторону рельса на расстоянии друг отДруга не менее четверти ширины под20кладки симметрично относительно передающей рамки, а выход компаратора через резистор соединен с его иеинвертирутащим входом. На фиг. I представлена блок-схема устройства; на фиг, 2 - схема установки рамок датчика. Устройство содержит датчик с одной передающей рамкой I, настроенной в резонанс конденсатором 2, и двумя приемными рамками 3, настроенными в резонанс конденсатором 4 генератор 5 синусоидального напряжения, подключенный к рамке 1, усилитель 6, фазовый детектор 7., компаратор 8 с резистором 9 положительной обратной связи, дифференцирующую цепь 10, триггер 11, выходной блок 12 и блок: 13 питания. Устройство работает следующим образом. Когда подкладка ж.д. пути не попадает в зону действия датчика, ЭДС, во никающие в приемных рамках 3 за счет действия первичного поля, создаваемого передающей рамкой 1, и вторичного поля, наводимого рельсом, равны и противофазны. При попадании подкладки 14 ж.д. пу ти в зону действия датчика вторичное поле от нее нарушает баланс напряжений в приемных рамках 3v Напряжение разбаланса после усиления в усилителе 6,поступает на фазовый детектор 7 на выходе которого появляется сигнал При проходе датчика над подкладкой знак-сигнала изменяется на противоположный в момент совпадения оси - С датчика с осью симметрии М-М подкладки 14. Этот сигнал поступает на вход компаратора 8 с нулевым пороговым уровнем, KOTOpbrii формирует прямоугол ный импульс в момент изменения знака сигнала фазового детектора на протиВОПОЛОЖНЬП. Для исключения ложных срабатываний устройства от помех, вызванных вибра цией датчика подкладки в процессе ра боты путевой машины,, выход компарато ра соединен через резистор 9 положительной обратной связи с его неинвер тирующим входом. Дифференцирующая цепь IО и триггер I1 формируют в момент прохождени датчика над осью симметрии подкладки импульс, управляющий работой выходно го блока 12, который осущестёляет уп равление остановкой машины в данной точке пути. Датчик подкладки работает наиболее надежно при расстоянии между цен рами приемных рамок 3 не менее 1/4 ширины подкладки 14 и расстоянии от ередающей рамки 1 до приемных рамок 3 е менее длины подкладки 14. Размеение рамок по разные стороны от ельса ж.д. пути позволяет исключить ожные срабатьшания от стыковых крепений, посторонних металлических предетов, встречающихся на пути, выдеяя из всего множества металлических бъектов лишь подкладку ж.д, пути. Точность индикации оси симметрии одкладки ;4 с помощью этого устройства составляет 3-4 мм при высоте расоложения датчика над шпапой до 220 мм, т.е. на 70 мм вьше головки ельса. Указанная точность сохраняется при расположении шпал вплотную руг к другу и при изменении температуры от -30 до . Применение устройства на путевых ашинах цикличного действия позволит полностью автоматизирова.ть цикл выправочно-подбивочных работ, улучшить условия труда обслуямвающего персонала и повысить производительность работы машины, и получить экономический эффект на одну путевую машину более 7000 руб. Формула изобретения Устройство для автоматического определения точек остановки шпалоподбивочных машин, содержащее датчик обнаружения подкладки, соединенный с генератором, усилитель, связанный с детектором, триггер с выходным блоком и блок питания, о тлиЧ ающ е е с я тем, что, с целью повьш ения надежности, оно снабжено компаратором, подключенным входом к детектору, а выходом :- через дифференцирующую цепь к триггеру, при этом датчик обнаружения подкладки содержит передающую рамку, подключенную к генератору и расположенную по одну сторону рельса, и две приемные рамки, включенные встречно на входе усилителя и расположенные по другую сторону рельса на расстоянии друг от другане менее четверти ширины подкладки симметрично относительно передающей рамки, а выход компаратора через резистор соединен с его неинвертирующим входом. Источники информации, принятые во внимание при экспертизе 1 . Авторское свидетельство С.- № , кл. Е 01 В 27/16, 18.1.
