(5) САМОНАТЯЖНОЙ ПРИВОД С ГИБКОЙ СВЯЗЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонатяжной привод | 1980 |
|
SU894275A1 |
| Самонатяжной ременный привод | 1979 |
|
SU806946A1 |
| Натяжной привод с гибкой связью | 1980 |
|
SU937838A1 |
| Самонатяжной ременный привод Н.И.Хабрата | 1980 |
|
SU954674A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ РЕМНЯ | 2009 |
|
RU2403468C1 |
| Самонатяжной ременный привод | 1979 |
|
SU929922A2 |
| Самонатяжной ременный приводН.и.ХАбРАТА | 1978 |
|
SU815360A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| Самонатяжной привод | 1985 |
|
SU1280247A1 |
| САМОНАТЯЖНОЙ ПРИВОД | 2001 |
|
RU2197655C2 |

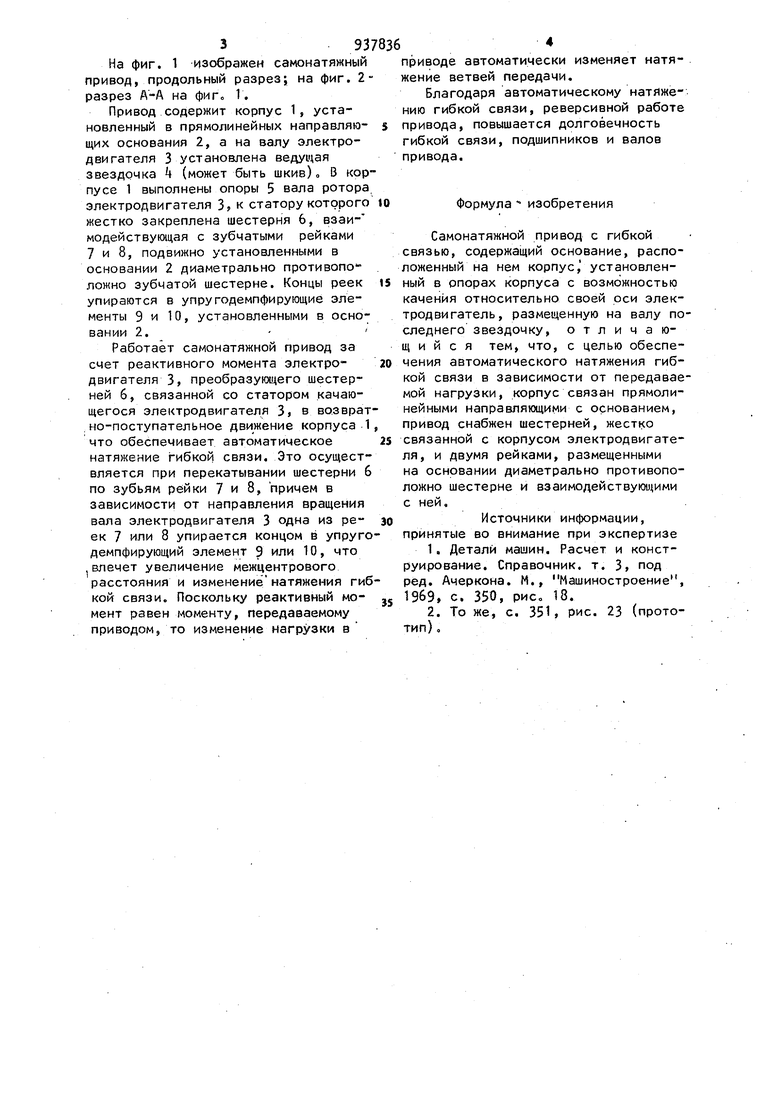
Изобретение относится к магнитостроению и может быть использовано во всех отраслях народного хозяйства для натяжения гибкой связи в передач Известна передача с гибкой связью содержащая ведущий и ведомый шкивы, охватывающую их гибкую связь, и натяжной ролик ril. Недостатком таких передач являетс невозможность обеспечения автоматиче кого натяжения при реверсировании. Наиболее близким по технической сущности к изобретению является самонатяжной привод с гибкой связью, содержащий основание, расположенный на нем корпус, установленный в опорах корпуса с возможностью качения относительно своей оси электродвигатель , размещенную на валу последнего звездочку 2. Автоматическое натяжение гибкой связи осуществляется реактивным моментом электродвигателя. В народных передачах не обеспечивается натямение при реверсировании. Цель изобретения - обеспечение ав томатического натяжения гибкой связи в зависимости от передаваемой нагрузки при любом направлении вращения вала электродвигателя. Указанная цель достигается тем, что корпус натяжного привода связан прямолинейными направляюи1ими с основанием, привод снабжен шестерней, жестко связанной с корпусом электродвигателя, и двумя рейками« размещeнны tt1 на основании диаметрально противоположно шестерне и взаимодействующими с ней. При взаимодействии шестерни с рейками осуществляется преобразование качательного движения корпуса электродвигателя в возвратнопоступательное движение привода, обеспечивающего автоматически натяжение гибкой связи. На фиг. 1 изображен самонатяжный привод, продольный разрезJ на фиг. 2 разрез А-А на фиг. 1. Привод содержит корпус 1, установленный в прямолинейных направляющих основания 2, а на валу электродвигателя 3 установлена ведущая звездочка (может быть шкив) В кор пусе 1 выполнены опоры 5 вала ротора электродвигателя 3 к статору которого жестко закреплена шестерня 6, взаимодействующая с зубчатыми рейками 7 и 8, подвижно установленными в основании 2 диаметрально противопо ложно зубчатой шестерне. Концы реек упираются в упругодемпфирующие элементы 9 и 10, установленными в основании 2.Работает самонатяжной привод за счет реактивного момента электродвигателя 3, преобразущего шестерней 6, связанной со статором качающегося электродвигателя 3, в возврат .но-поступательное движение корпуса 1 что обеспечивает автоматическое натяжение гибкой связи. Это осуществляется при перекатывании шестерни 6 по зубьям рейки 7 и 8, причем в зависимости от направления вращения вала электродвигателя 3 одна из реек 7 или 8 упирается концом в упруго демпфирующий элемент 9 или 10, что .влечет увеличение межцентрового расстояния и изменение натяжения гиб кой связи. Поскольку реактивный момент равен моменту, передаваемому приводом, то изменение нагрузки в приводе автоматически изменяет натяжение ветвей передачи. Благодаря автоматическому натяжению гибкой связи, реверсивной работе привода, повышается долговечность гибкой связи, подшипников и валов привода. Формула - изобретения Самонатяжной привод с гибкой связью, содержащий основание, расположенный на нем корпус, установленный в опорах корпуса с возможностью качения относительно своей оси электродвигатель, размещенную на валу последнего звездочку, отличающийся тем, что, с целью обеспечения автоматического натяжения гибкой связи в зависимости от передаваемой нагрузки, корпус связан прямолинейными направляющими с основанием, привод снабжен шестерней, жестко связанной с корпусом электродвигателя, и двумя рейками, размещенными на основании диаметрально противоположно шестерне и взаимодействуюи ими с ней. Источники информации, принятые во внимание при экспертизе 1.Детали машин. Расчет и конструирование. Справочник, т. 3, под ред. Ачеркона. М., Машиностроение, 1969, с. 350, рисо 18. 2.То же, с. 351 рис. 23 (прототип) ,
