(54) САМОНАТЯЖНОЙ РЕМЕННЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонатяжной ременный привод | 1979 |
|
SU929922A2 |
| Самонатяжной привод | 1980 |
|
SU894275A1 |
| Самонатяжной привод с гибкой связью | 1980 |
|
SU937836A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| Самонатяжной ременный привод Н.И.Хабрата | 1980 |
|
SU954674A1 |
| Самонатяжной ременный приводН.и.ХАбРАТА | 1978 |
|
SU815360A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЕРЕДАЧИ С ГИБКОЙ СВЯЗЬЮ | 2007 |
|
RU2345338C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ РЕМНЯ | 2009 |
|
RU2403468C1 |
| Самонатяжной привод | 1985 |
|
SU1280247A1 |
| ПРИВОДНОЙ МЕХАНИЗМ | 2000 |
|
RU2158791C1 |
1
Изобретение относится к приводам с гибкой связью, предназ{Гаченным для передачи мощности между параллельными валами в различных областя машиностроения.
Известен самонатяжной ременный привод, содержащий электродвигатель, ведуи1ий, установленный на валу электродвигателя, и ведомый шкивы, охватывающую их гибкую связь и шарнирные опоры, расположенные с двухторцовых сторон электродвигателя fll .
Однакоэто устройство характеризуется автоматичностью создаваемого натяжения гибкой связи в зависимости от величины передаваемой мощности, а также невозможностью получения указанного эффекта при реверсировании.
Цель изобретения - обеспечение реверсивной работы привода.
Поставленная цель достигается тем, что вал электродвигателя размещен в шарнирных опорах, а на корпусе последнего закреплен рычаг с натяжным роликом, воздействующим на ведомую ветвь ременного привода.
Кроме того, с целью обеспечения одинакового натяжения в ведомых ветвях привода при передаче одной и той же нагрузки в различных направлениях, на корпусе электродвигателя установлен противовес, уравновешивающий электродвигатель и рычаг с .натяжным роликом.
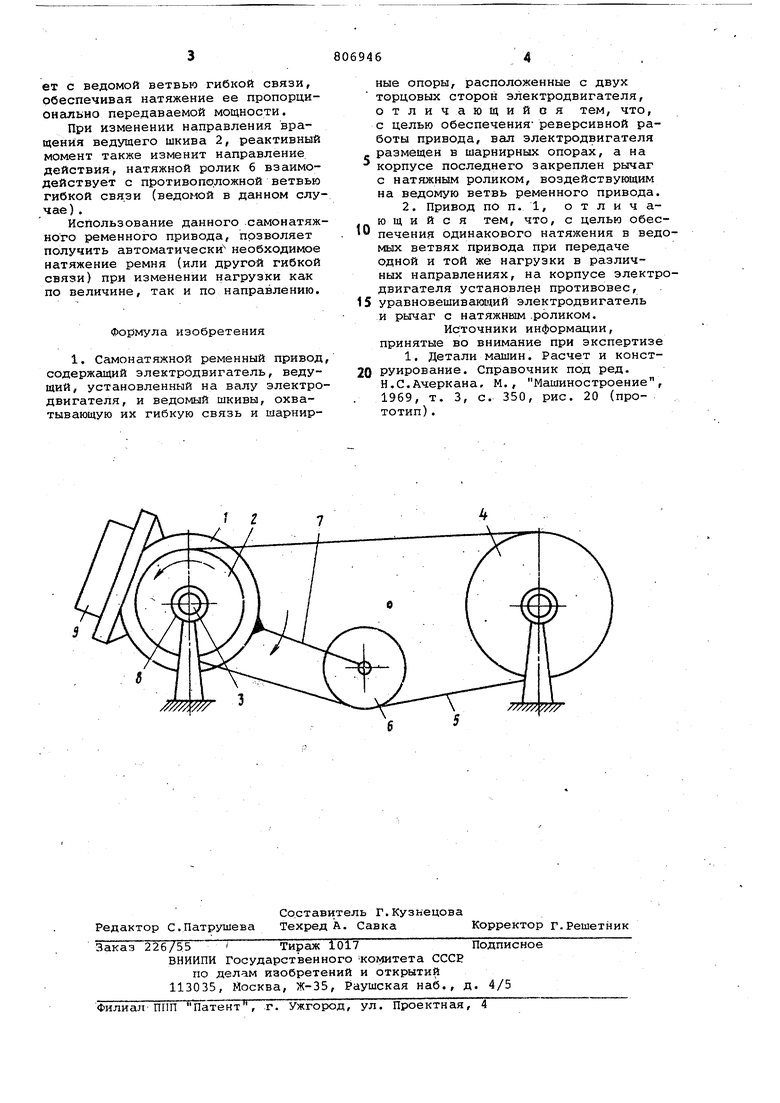
На чертеже представлен самона0тяжной ременной привод, общий вид.
Привод состоит из электродвигателя 1, ведущего шкива 2, установленного на валу 3 электродвигателя, ведомого шкива 4 и охватывающей их
5 гибкой связи 5,.натяжного ролика 6, установленного на рычаге 7, закрепленного на корпусе электродвигателя 1г
Вал 3 электродвигателя устано0влен в шарнирных опорах 8. На корпусе электродвигателя установлен противовес 9.
Работает привод следующим обраЗ.ОМ.
5
При вращении ведущего шкива 2 против часовой стрелки реактивный моме,нт на корпусе электродвигателя 1 через рычаг 7 поворачивает его 1ПО часовой (Стрелки, а закрепленный /на рычаге 7 ролик 6 взаимодейству-0
ет с ведомой ветвью гибкой связи, обеспечивая натяжение ее пропорционально передаваемой мощности.
При изменении направления вращения ведущего шкива 2, реактивный момент также изменит направление действия, натяжной ролик 6 взаимодействует с противоположной ветвью гибкой связи (ведомой в данном случае) ,
Использование данного самонатяжного ременного привода, позволяет получить автоматически необходимое натяжение ремня (или другой гибкой связи) при изменении нагрузки как по величине, так и по направлению.
Формула изобретения
5 уравновешиваю1дий электродвигатель и рычаг с натяжнБШ .роликом.
Источники информации, принятые во внимание при экспертизе 1. Детали машин. Расчет и конст0 РУирование. Справочник под ред.
Н.С.Ачеркана, М., Машиностроение, 1969, т. 3, с. 350, рис. 20 (прототип) .
