(54) ЧАСТОТНЫЙ ДАТЧИК МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотный датчик малых линейных перемещений | 1961 |
|
SU150040A1 |
| ВИБРОВИСКОЗИМЕТРИЧЕСКИЙ ДАТЧИК | 2008 |
|
RU2419781C2 |
| ПОПЛАВКОВАЯ ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1993 |
|
RU2037642C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| Датчик давления | 1990 |
|
SU1778565A1 |
| ДАТЧИК ДАВЛЕНИЯ С ЧАСТОТНЫМ ВЫХОДОМ | 1999 |
|
RU2172477C1 |
| Трехкоординатный преобразователь виброперемещений | 1988 |
|
SU1589096A1 |
| СТЕНД ДЛЯ БАЛАНСИРОВКИ | 1992 |
|
RU2069330C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОСТЕНД И ВИБРАТОР РЕЗОНАНСНОГО ТИПА | 2007 |
|
RU2334966C1 |
1
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения малых перемещений.
Известны частотные датчики линейных перемещений, содержащие электрические колебательные системы, например колебательные контуры, собственная частота колебаний которых зависит от перемещения сердечника катушки индуктивности, связанного с контролируемым объектом f1 .
Недостатком таких датчиков является низкая добротность и, как следствие, невысокая точность измерения.
наиболее близким по технической сущности к изобретению является частотный датчик малых линейных перемещений, содержащий корпус, задающий перемещение элемент, электромеханический преобразователь и механическую колебательную систему, выпол;ненную в виде двух наложенных друг на друга плоских пружин, одни концы которых соединены между собой и несут, якорь преобразователя, свободный конец нижней пружины жестко крепится к корпусу датчика, а свободный
конец верхней пружины - к задающему перемещение элементу 2.
Недостатком известного датчика является значительная зависимость его. показаний от температуры.
Цель изобретения - компенсация температурной погрешности.
Эта цель достигается тем, что задающий перемещение элемент выпол10нен из термобиметалла.
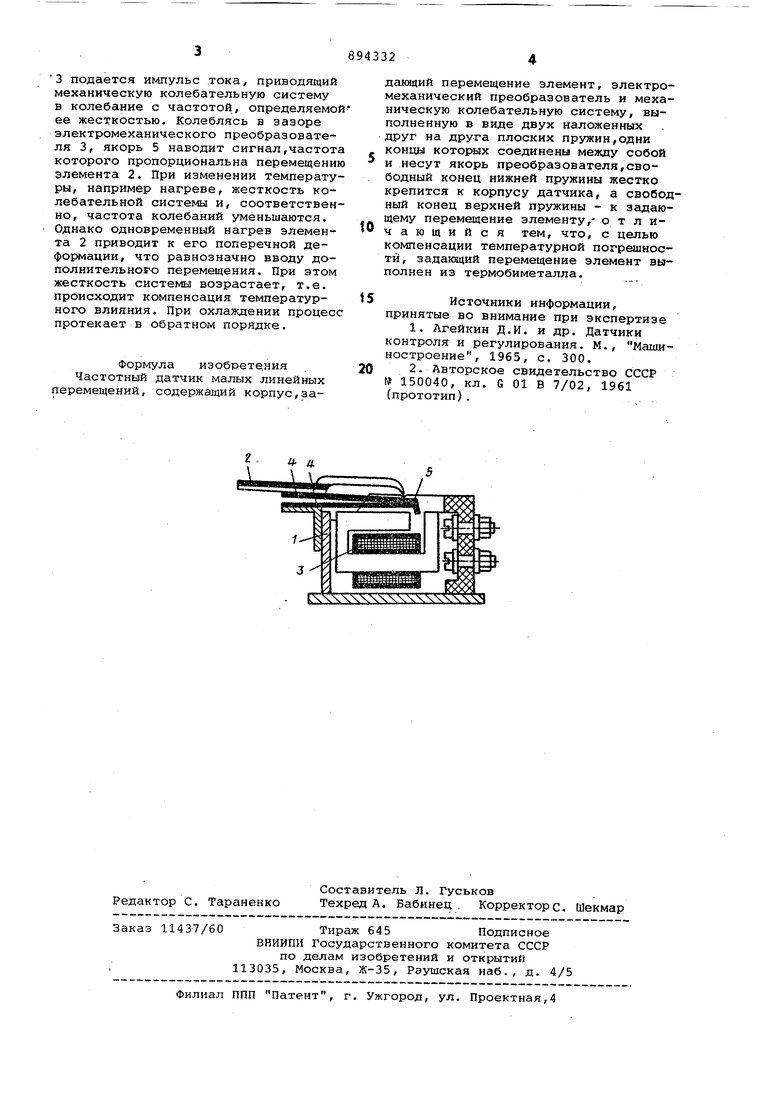
На чертеже приведена принципиальная схема датчика.
Датчик содержит корпус 1, задающий перемещение элемент.2, электро15:механический преобразователь 3 и механическую колебательную систему, ;выполненную в виде двух наложенных .друг на друга плоских пружин 4, одни концы которых соединены между собой
20 и несут якорь 5 преобразователя 3. Свободный конец нижней из пружин 4 жестко закреплен на корпусе 1, а верхней - контактирует с задающим перемещение элементом 2, который вы25полнен из термобиметалла.
Датчик работает следующим образом.
Задающий перемещение элемент 2 связывается с контролируемым объектом. Перед началом измерения на
30 электромеханический преобразователь
3 подается импульс тока, приводящий механическую колебательную систему в колебание с частотой, определяемой ее жесткостью. Колеблясь в зазоре электромеханического преобразователя 3, якорь 5 наводит сигнал,частота которого пропорциональна перемещению элемента 2. При изменении температуры, например нагреве, жесткость колебательной системы и, соответственно, частота колебаний уменьшаются. Однако одновременный нагрев элемента 2 приводит к его поперечной деформации, что равнозначно вводу допол ни те ль HOJTO перемещения. При этом жесткость системы возрастает, т.е. происходит компенсация температурного влияния. При охлаждении процесс протекает в обратном порядке.
Формула изобретения Частотный датчик малых линейных перемещений, содержащий корпус,задающий перемещение элемент, электромеханический преобразователь и механическую колебательную систему, выполненную в виде двух наложенных друг на друга плоских пружин,одни концы которых соединены между собой и несут якорь преобразователя,свободный конец нижней пружины жестко крепится к корпусу датчика, а свободный конец верхней пружины - к задающему перемещение элементу,- отличающийся тем, что, с целью компенсации температурной погрешности, задакндий перемещение элемент выполнен из термобиметалла.
Источники информации, принятые во внимание при экспертизе
