(54) СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для балансировки роторов | 1981 |
|
SU983477A1 |
| Привод балансировочного станка | 1984 |
|
SU1508115A1 |
| Устройство для привода роторов во вращение на балансировочных станках | 1982 |
|
SU1190224A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 2014 |
|
RU2561249C2 |
| ПРИВОДЫ С ПОСТОЯННОЙ ЛИНЕЙНОЙ СКОРОСТЬЮ ЛОПАСТЕЙ ДЛЯ ЦИКЛОИДНЫХ РОТОРОВ И ГРЕБНЫХ ПРОПЕЛЛЕРОВ С НЕКРУГОВЫМИ ОРБИТАМИ | 2024 |
|
RU2828914C1 |
| Устройство для привода во вращение балансируемого ротора | 1985 |
|
SU1314242A1 |
| СТАНОК ДЛЯ РУЧНОЙ ОГРАНКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2000 |
|
RU2187420C1 |
| Станок для обработки клиновыхРЕМНЕй | 1979 |
|
SU839733A1 |
| Балансировочный станок | 1989 |
|
SU1649327A1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
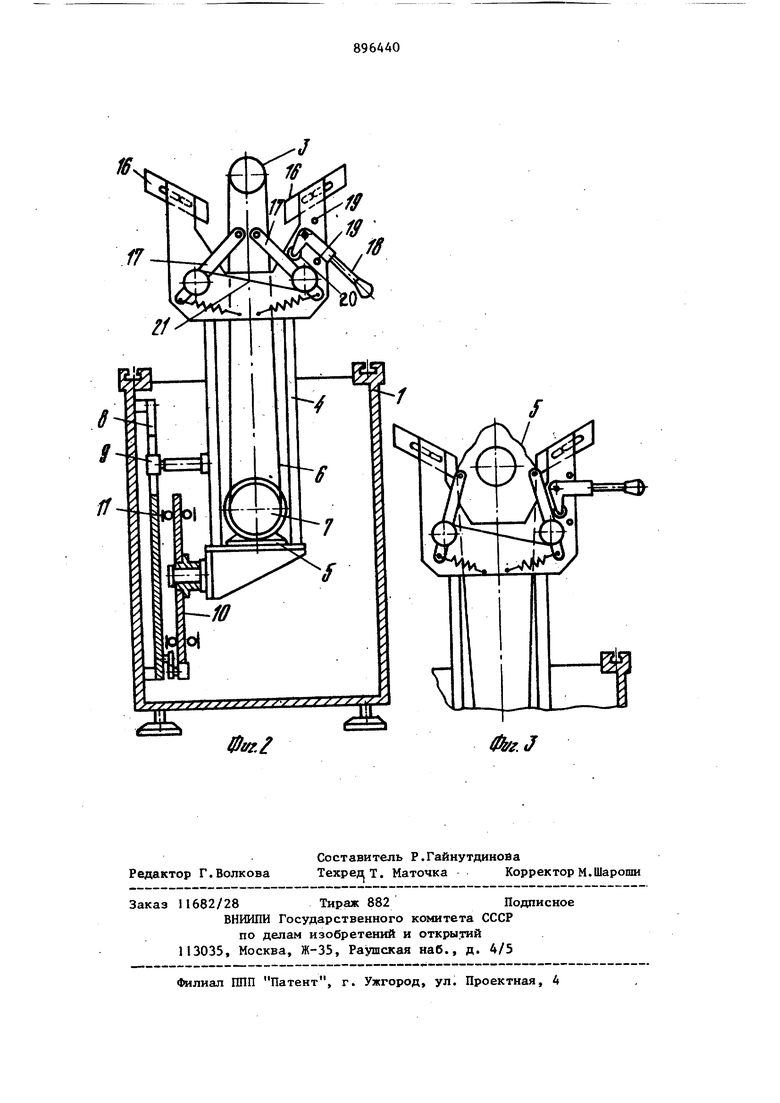
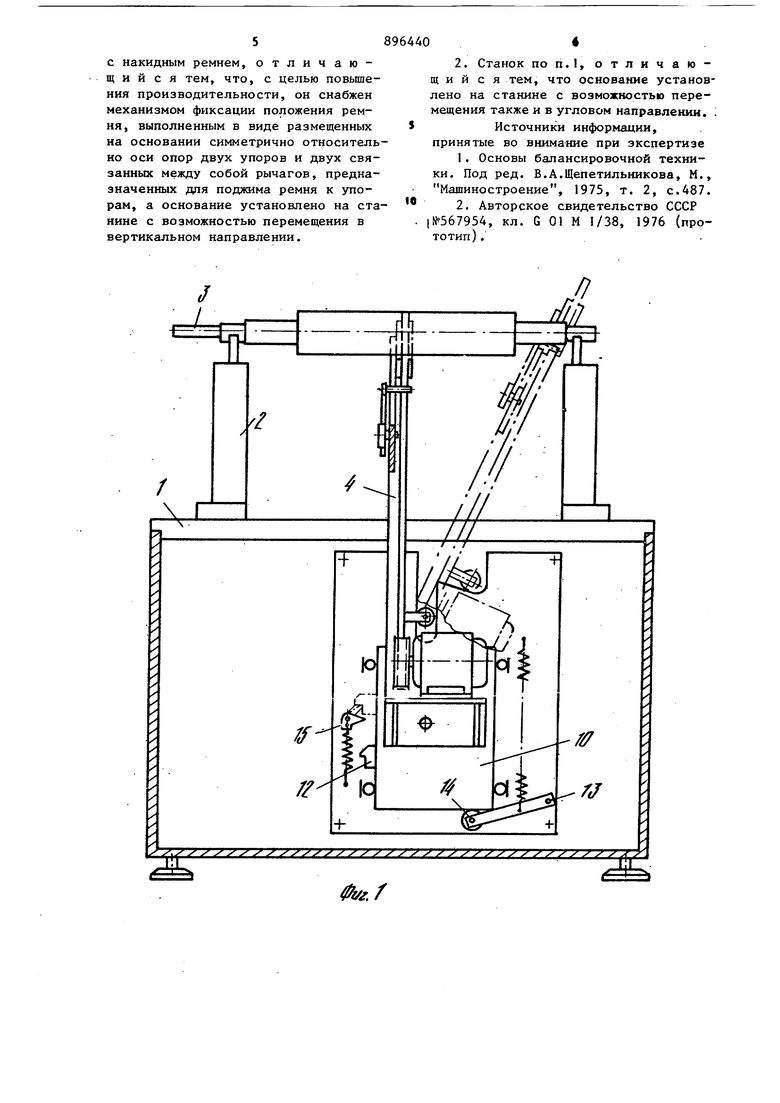
Изобретение относится к балансир вочной технике и может быть использовано в станкостроении при изготов лении балансировочных машин. Известен станок для балансировки роторов, содержащий станину, устано ленные на ней опоры для ротора и ос нование с приводом вращения ротора с накидным ремнем } . Наиболее близким по технической сущности к предлагаемому является станок для балансировки роторов, со держащий станину, установленные на ней опоры для ротора и основание с приводом вращения ротора с накидным ремнем, размещенным на шкиве. Привод выполнен в виде двух симметрично расположенных относительно оси опор рычагов, шарнирно закрепленных на раме с возможностью поворота в вертикальной плоскости 2 . Недостатком известных станков является невысокая производительность и неудобство обслуживания такого привода. Это связано с тем, что для снятия ротора с опоры ремень снимают со шкива, полученную петлво закрепляют, например, с помощью крючка, после установки на опоры другого ротора ремень вновь надевают на шкив. Цель изобретения - повышение производительности . Поставленная цель, достигается тем, что станок снабжен механизмом фиксации положения ремня, выполненным в виде размещенных на основании симметрично относительно оси опор двух упоров и двух связанных между собой рычагов, предназначенных для поджима ремня к упорам, а основание установлено на станине с возможностью перемещения в вертикальном направлении. Кроме того, основание может быть установлено на станине с возможностью перемещения также и в угловом направлении. На (Jsir. 1 и 2 схематично изо бра жен станок, общий вид; на фиг. 3 схема работы станка в динамике. Станок содержит станину 1, на которой установлены опоры 2 для ротора 3 и основание 4 с приводом 5 вращения ротора 3 с накидным ремнем 6. Ремень 6 охватывает ротор 3 и приводной шкив 7 привода 5, размещенного на основании 4. На станине I закреп41ена плита 8, с вертикальным пазом которой связан шарнирный ролик 9, размещенный на основании 4, на котором размещена также каретка 10, связанная-с вертикальными направ ляющими 11, что обеспечивает возможность перемещения основания 4 в вертикальном и угловом направлениях. На каретку 0 с зубом 12 воздействует разгрузочный механизм, состоящий из подпружиненного рычага 13, снабженного роликом 14. Зуб 12 каретки 10 взаимодействует с подпружиненной защелкой 15, установленной на плите 8 .. Станок снабжен механизмом фиксаци положения ремня 5, выполненным в виде двух регулируемых упоров 16 и двух связанных между собой рычагов 17. Упоры 16 и рычаги 17 установлены на основании 4 симметрично относительно оси опор 2. Каждая ветвь ремня 5 размещается между рычагом 17 и упором 16. В верхней части основания 4 установлен механизм перемещения упоров 16, представляющий собой качающуюся рукоятку 18 и упоры 19. Хвостовик рукоятки 18 снабжен роликом 20, который контактирует с одним из рычагов 17. Рычаги 17 подпружинен и связаны друг с другом передачей с гибкой связью 21, например, стальной лентой. Станок работает следующим образом Балансируемый ротор 3 приводится во вращение накидным ремнем 6, натяжение которого осуществляется за счет части веса основания 4, со смон тированными на нем элементами и приводом 5. По окончании измерения оператор выключает привод 5 и поднимает его вверх за рукоятку 18. При этом рукоятка 18 сначала поворачивается до верхнего упора 19 и ее хвостовик освобождает рычаг 17-. Рычаги 17 под действием пружин расходятся, защемляют ремень 6, прижимают его к упорам 16 и фиксируют положение ремня 6. При дальнейшем приложении УСИЛИЯ к рукоятке 18 каретка 10 с основанием 4 перемещается вверх в направляющих 11. Ремень 6 обладает достаточной жесткостью и сохраняет форму петли. Дальнейшая работа зависит от размера балансируемой детали. В тех случаях, когда размеры и вес ротора 3 позволяют оператору легко держать его одной рукой, то он поднимает привод до срабатывания запэлки 15 и оставляет его в таком положении. При этом петля ремня 6 освобождает ротор 3 и позволяет снять его с опор 2. После установки нового ротора 3 оператор возвращает привод 5 в исходное положение. Для этого он приподнимает привод 5 за рукоятку 18, пока зуб 12 не перескочит защелку 15, а затем опускает привод 5. После того, как привод 5 повиснет на ремне 6, оператор спускает рукоятку 18 вниз до упора 19, причем хвостовик рукоятки 18, воздействуя на один из рычагов 17, переводит их в исходное положение, освобождая ремень 6. В этом положении станок готов к работе. В тех случаях, когда ротор 3 необходимо держать двумя руками, оператор поднимает привод 5 выше защелки J5 так, что ролик 9 выходит из вертикального паза плиты 8 и привод 5 поворачивается вокруг шарнира 22. Ролик 9 при этом скользит по криволинейной части 23 плиты 8. В наклонном положении петля ремня 6 смещена к опоре 2 и открывает доступ к ротору 3. Возврат привода в исходное положение производится его выпрямлением так же, как и в описанном выше случае. Наличие механизмов, обеспечивающих перемешэние основания в вертикальном и угловом направлениях, позволяет повысить производительность балансировки за счет возможности быстрой ены роторов путем образования петли накидного ремня над образующей ротора с исключением неудоб ных и непроизводительных операций с приводным накидным ремнем. Формула изобретения 1. Станок для балансировки роторов, содержащий станину, установленные на ней опоры для ротора и основание с приводом вращения ротора с накидным ремнем, отличающийся тем, что, с целью повышения производительности, он снабжен механизмом фиксации положения ремня, выполненным в виде размещенных на основании симметрично относитель но оси опор двух упоров и двух связанных между собой рычагов, предназначенных для поджима ремня к упорам, а основание установлено на ста нине с возможностью перемещения в вертикальном направлении. 2. Станок ПОП.1, отличающийся тем, что основание установлено на станине с возможностью перемещения также и в угловом направлении. . Источники информации, принятые во внимание при экспертизе 1.Основы балансировочной техники. Под ред. В.А.Щепетильникова, М., Машиностроение, 1975, т. 2, с.487. 2,Авторское свидетельство СССР |№567954, кл. G 01 М 1/38, 1976 (прототип).
