1
Изобретение относится к автоматике, предназначено для автоматизации сбора и регистрации информации и может быть использовано в устройствах кодирования и дистанционной передачи дискретной информации об углах поворота оси прибора с целью последующей {зегистрации ее на табло и в схемах автоматики, в частности в системе автоматизации стендовых испытаний двигателей тракторов.
Известен преобразователь угловых перемещений в код, содержащий синусно-косинусный трансформатор, формирователь кода, два делителя частоты, генератор импульсов, блок памяти, сумматор и блок сравнения 1.
Недостаток преобразователя - его невысокая точность.
Известен преобразователь угла поворота вала в код, содержащий датчик угла поворота, выход которого соединен с первым входом формироватепя импульсов счета, выход которого
.соединен с входом реверсивного счетчика точного отсчета, другой вход которого соединен с выходом корректирующего контура, блок синхронизации, один выход которого соеди5 ней с входом датчика угла поворота, а другой выход- со вторым входом формирователя импульсов счета, канал грубого отсчета, состоящий из последовавтельно соединенных дополнительного формирователя импульсов, формировате ля кода и счетчика щагового отсчета, и регистратор, соединенный с выходами счетчиков 2.
Недостатками преобразователя являН ются его сложность и невысокая точность из-за наличия мультипликативной погрешности.
Цель изобретения - повьшение точности и упрощение преобразов ателя.
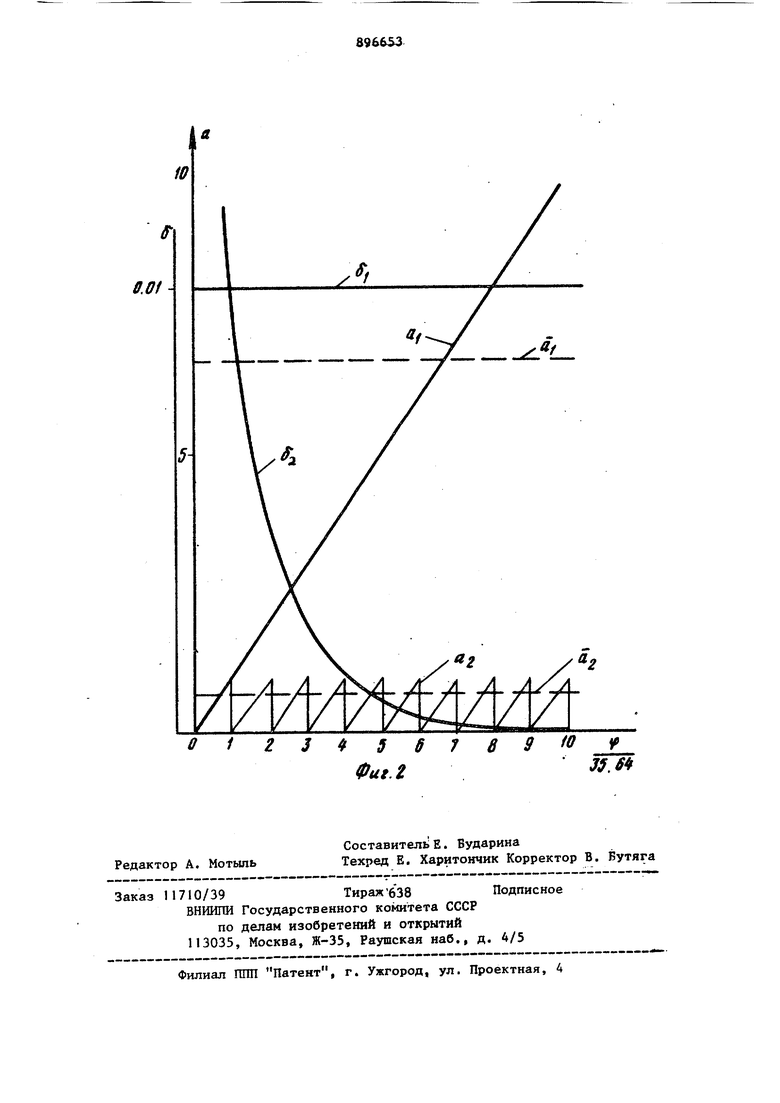
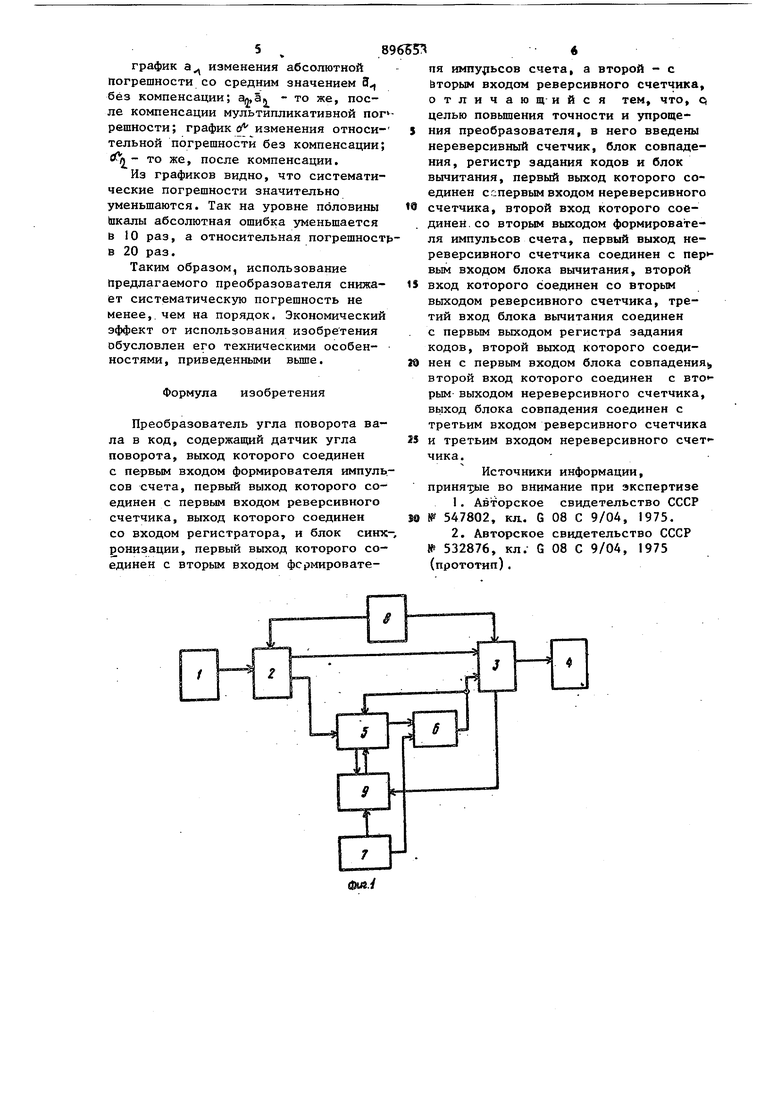
Поставленная цель достигается тем, что в преобразователь угла поворота вала в код, содержащий датчик угла поворота, выход которого соединен с первым входом формирователя импульсов счета, первый выход которо го соединен с первым входом реверсив ного счетчика, выход которого соединен со входом регистратора, и блок синхронизации, первый выход которого соединен с вторым входом формировате ля импульсов счета, в второй - с вторым входом реверсивногосчетчика, введены нереверсивный счетчик, блок совпадения, регистр задания кодов и блок вычитания, первый выход которого соединен с первым входом неревер .сивного счетчика, второй вход котор го соединен со вторымвыходом форми рователя имhyльcoв счета, первый выход нереверсивного счетчика соединен с первым входом блока вычитания второй вход которогб соединен со вторым выходом реверсивного счетчика, третий вход блока вычитания соединен с первым выходом регистра задания кодов, второй выход которого соединен с первым входом блока совпа дения, второй вход которого соединен с вторым выходом нереверсивного счет чика, выход блока совпадения соединен с третьим входом реверсивного счетчика и третьим входом нереверсив ного счетчика. На фиг. 1 показана блок-схе а преобразователя -угла поворота вала в код; на фиг. 2 - графики систематических погрешностей преобразователя. Преобразователь содержит датчик 1 угла поворота, формирователь 2 импульсов счета, реверсивный счетчик 3, регистратор 4, нереверсивный счетчик 5, блок 6 совпадения, регист 7 задания кодов, блок 8 синхронизации и блок 9 вычитания. Преобразователь работает следующим образом. Счетчик 3 считает, а регистратор 4 фиксирует количество импульсов, сформированных формирователем 2, пропорциональное углу поворота датчика 1. В счетчике 3 счет в прямом направлении осуществляется подачей на его вход, наряду с тактовыми импульсами блока 8 синхронизации, счетных импульсов от формирователя 2 а счет в обратном направлении - запретом каждым счетным импульсом одкого тактового. Перед экспериментом в регистр 7 наносится значение коэффициента коррекции К. Тогда при достижении счета К иипульсов .счетчиком 5 на выходе блока 6 совпадения появляется ИМПУЛЬС коооекци для счетчика 3. Регистоатоо 4 показывает скорректированное значение угла. Импульс коррекции одновременно сбрасывает на нуль счетчик 5, подготавливая его к последующей работе. При реверсе, который может наступить в любой момент счета, реверсивный счетчик 3 начинает вычитать счетный импульс, а счетчик 5 продолжает суммировать. При этом возникает дополнительная погрешность за счет неопределенного состояния счетчика 5. Для исключения этого в момент воздействия измерительного и опорного сигнала на входах реверсивного счетчика 3, последний выдает сигнал на блок 9, при котором из содержимого регистра 7 вычитается сог цержимое счетчика 5 и результат за1исывается в счетчик 5. Содержимое егис,тра 7 при этом сохраняется. Счетчик 5 суммирует импульсы, считая их в обратном направлении от момента реверса и выдает корректирующий сигнал в нужный момент. Дополнитель-, ная ошибка коррекции за счет реверса не возникает. В общем виде задача ставится следующим образом. При автоматическом измерении, кодировании и дистанционной регистрации какой-то линейной величины, в частности угла поворота вала, преобразователь имеет абсолютную систе-; матическую ошибку 0 , которая может быть представлена в виде линейновозрастающей функции от О до Ч в течение измерения от О до полной шкалы 6 (фиг. 2). Среднее значение равно 5/1. При этом относительная погрешность равномерна по всей шкапе и равнаВ процессе измерения абсолютная систематическая погрешность QQ распределена равномерно по всему диапазону измерения со средним значением Ai. Относительная же погрешность до первого корректирующего импульса равна 3 РИ последующих уменьшаться по закону, близкому к экспоненциальному. На графиках фиг. 2 (при f 345°, К 23, где К коэффициент коррекции) представлены:
график а изменения абсолютной погрешности со средним значением 3 без компенсации; aQ,aj - то же, после компенсации мультипликативной погрешности; график tf изменения относительной погрешности без компенсации; - то же, после компенсации.
Из графиков видно, что систематические погрешности значительно уменьшаются. Так на уровне половины Ь1калы абсолютная ошибка уменьшается & 10 раз, а относительная погрешноств 20 раз.
Таким образом, использование Предлагаемого преобразователя снижает систематическую погрешность не менее,, чем на порядок. Экономический эффект от использования изобретения обусловлен его техническими особенностями, приведенными вьш1е.
Формула изобретения
Преобразователь угла поворота вала в код, содержащий датчик угла поворота, выход которого соединен с первым входом формирователя импульсов счета, первый выход которого соединен с первым входом реверсивного счетчика, выход которого соединен со входом регистратора, и блок синх ронизации, первый выход которого соединен с вторым входом фсрмироватепя импурьсов счета, а второй - с вторым входом реверсивного счетчика, отличающийся тем, что, Q целью повьш1ения точности и упрощения преобразователя, в него введены нереверсивный счетчик, блок совпадения, регистр задания кодов и блок вычитания, первый выход которого соединен с спервым входом нереверсивного
счетчика, второй вход которого соединен, со вторым выходом формирователя импульсов счета, первый выход нереверсивного счетчика соединен с перовым входом блока вычитания, второй
вход которого соединен со вторым выходом реверсивного счетчика, третий вход блока вычитания соединен с первым выходом регистра задания кодов, второй выход которого соединен с первым входом блока совпадения второй вход которого соединен с выходом нереверсивного счетчика, выход блока совпадения соединен с третьим входом реверсивного счетчика
и третьим входом нереверсивного счет чика.
Источники информации, приня- ые во внимание при экспертизе
1.Авторское свидетельство СССР № 547802, кл.. G 08 С 9/ОА, 1975.
2.Авторское свидетельство СССР № 532876, кл. G 08 С 9/04, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный аналого-цифровой преобразователь | 1979 |
|
SU864552A1 |
| Цифроаналоговый синхронизатор | 1990 |
|
SU1758767A1 |
| Адаптивный аналого-цифровой преобразователь | 1980 |
|
SU942257A1 |
| Цифровой компенсационный фазометр | 1980 |
|
SU920563A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ | 1991 |
|
RU2042113C1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Цифровой синтезатор функций | 1980 |
|
SU879609A2 |
| Устройство для автоматического измерения динамических характеристик быстродействующих аналого-цифровых преобразователей | 1980 |
|
SU892705A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU553644A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |