(54) ПРИВОД ШАРНИРА МИКРОМАНИПУЛЯТОРА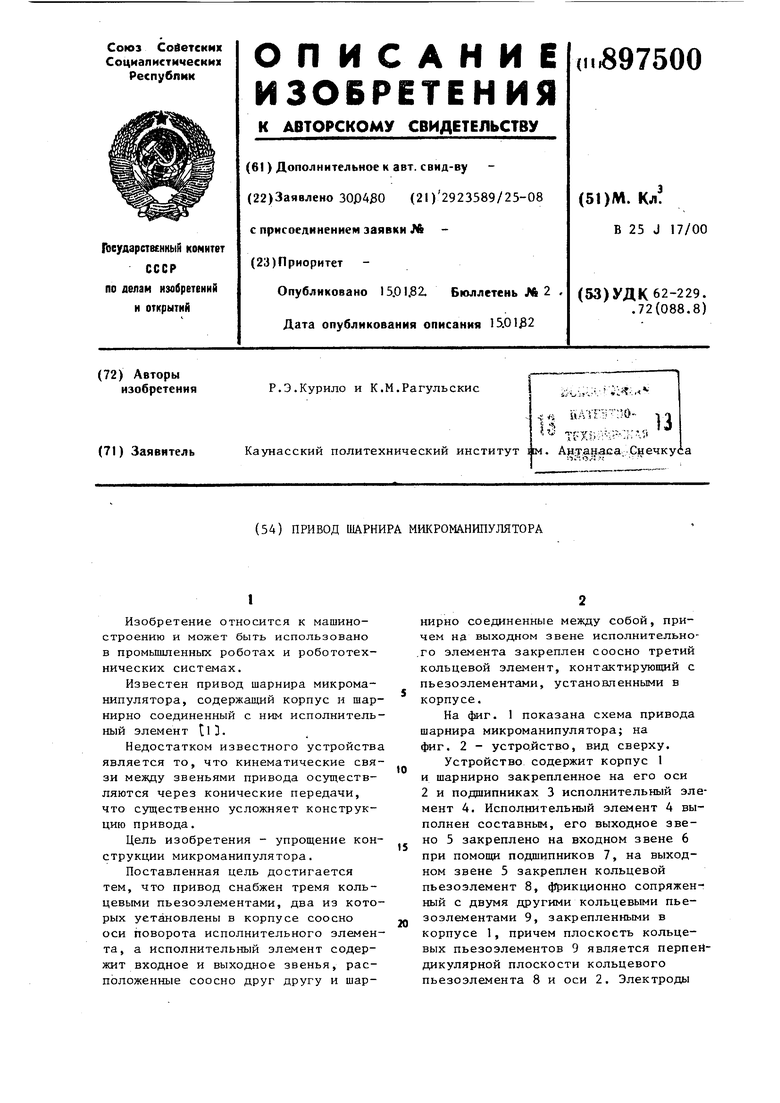
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| Микроманипулятор | 1982 |
|
SU1102669A1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2476838C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
| МЕХАНИЧЕСКИЙ МИКРОМАНИПУЛЯТОР (ВАРИАНТЫ) | 2018 |
|
RU2688487C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПИШУЩЕГО УЗЛА | 2011 |
|
RU2475699C2 |
| Исполнительный механизм имитатора пониженной гравитации транспортных средств | 1978 |
|
SU981842A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Модуль манипулятора | 1980 |
|
SU948660A1 |
1
Изобретение относится к машиностроению и может быть использовано в промышленных роботах и робототехнических системах.
Известен привод шарнира микроманипулятора, содержащий корпус и шарнирно соединенный с ним исполнительный элемент tl3Недостатком известного устройства является то, что кинематические связи между звеньями привода осуществляются через конические передачи, что существенно усложняет конструкцию привода.
Цель изобретения - упрощение конструкции микроманипулятора.
Поставленная цель достигается тем, что привод снабжен тремя кольцевыми пьезоэлементами, два из которых установлены в корпусе соосно оси поворота исполнительного элемента, а исполнительный элемент содержит входное и выходное звенья, расположенные соосно друг другу и шарнирно соединенные между собой, причем на выходном звене исполнительно,го элемента закреплен соосно третий кольцевой элемент, контактирующий с пьезоэлементами, установленными в корпусе.
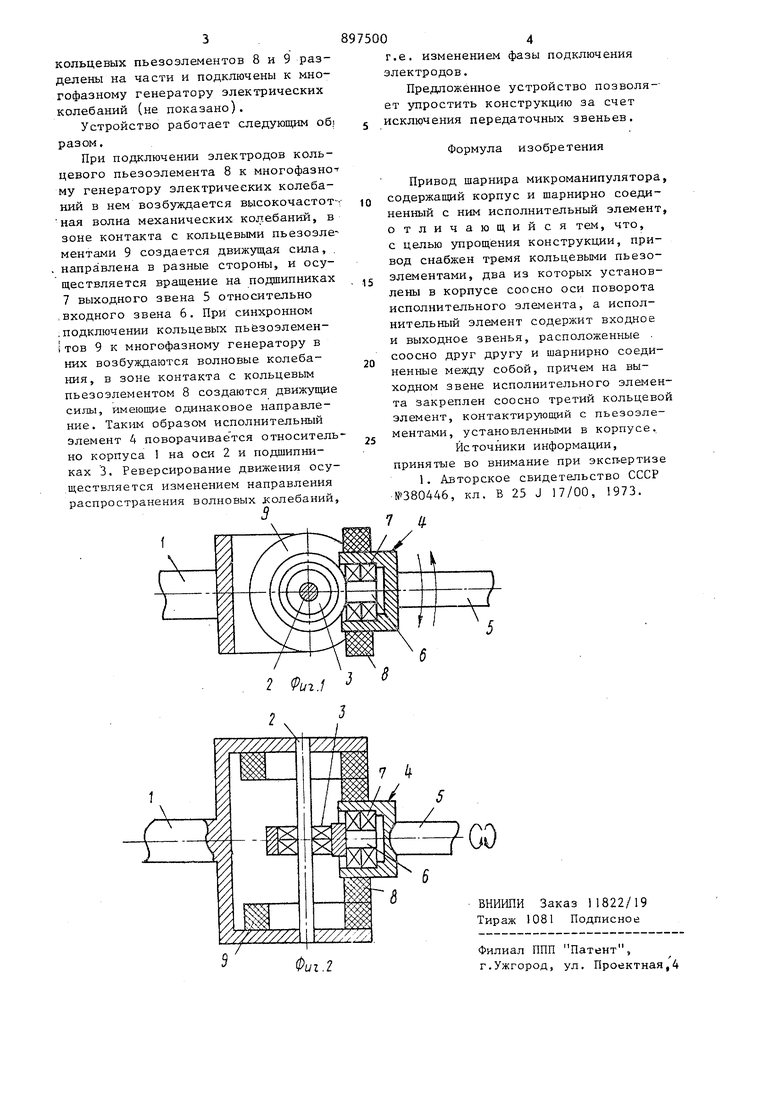
На фиг. 1 показана схема привода шарнира микроманипулятора; на фиг. 2 - устройство, вид сверху.
Устройство содержит корпус 1 и шарнирно закрепленное на его оси 2 и подшипниках 3 исполнительный элемент 4. Исполнительный элемент 4 выполнен составным, его выходное звено 5 закреплено на входном звене 6 при помощи подшипников 7, на выходном звене 5 закреплен кольцевой пьезоэлемент 8, ф зикционно сопряженный с двумя другими кольцевыми пьезоэлементами 9, закрепленными в корпусе 1, причем плоскость кольцевых пьезоэлементов 9 является перпендикулярной плоскости кольцевого пьезоэлемента 8 и оси 2. Электроды
