Известен епособ лоддержакия заданного оптимального отношения лннейНых е;кОростоп бо,коБОго-иеремещения и чернаковон цепи драги, осно-ванный на замере скорости бокового перемещения драги методом непрерывного дифференц;ирОвания угла поворота драги п.ри иомо1Д:и (Прецессион.ного гироскопа.
Описываемый способ отличается от известного тем, что сигнал обратной связи ио скорости бокового /перемещения формируют ум-иожением сигнала скорости вращения двигателя лебедк.и носовых канатов иа дискретно-постоянный сигнал, получаемый путем деле.ния средней за ИНтер вал дискретности лилейной скороети бокового перемещевия драги на значения сигнала скорости .вращения двигателя лебедки в конце каждого интервала дискрегНОСТ|И.
Эт.о позвол5 ет иовысить точность иоддержаггня отнощения лннейяых скоростей бо.кового перемещения ai чер.пакоеой цени драпн.
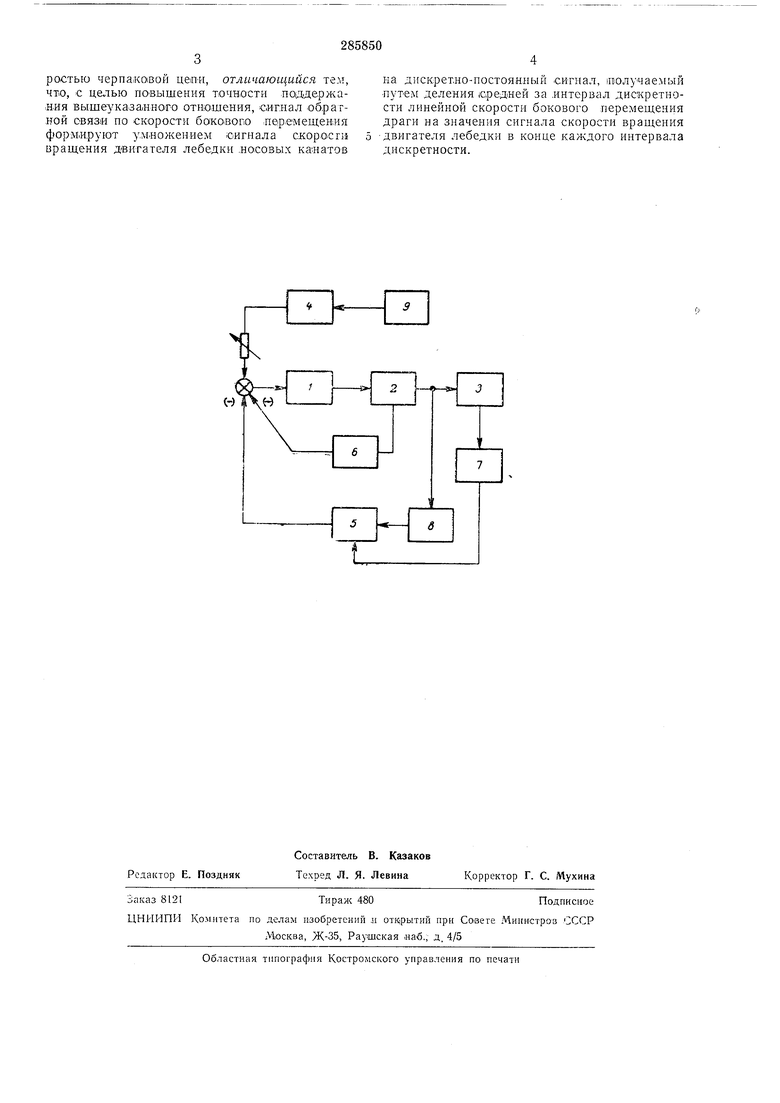
На чертеже представлена схема, поясняющая описываемый способ, где / - электропреобразо;ватель; 2 - двигатель лебедки носовых канатов; 3 - драга; 4 - тахогенератор двигателя чершаковой цепи: 5- вычислительное устройство; 6-блок токовой от.сечки; 7-измеритель средней Линейной скорости бокового перемещения; 8 - тахогенератюр двигателя лебедки; 9-автоматаз-ираванный электроиривод черна.кавой цени.
Способ реализуется следующим образом. На ВХОД эл:е1кт.ронреобразователя / поступают задающий сигнал скорости двигателя черпаковой цепи от тахогенератара 4, сигнал отрицательиой о.братно связи НО л:инейной скорости бокового неремещения от вычисл.ител11лого устройства 5 и сигнал токовой отсечки, защищающий двигатель лебедки от перегрузок. Измеритель 7 содержит в качестве датчнка .измер.ителя углового перемещения драги за интервал днскретностн свободный ги.роскоп. В нем осуществляется умножен-ие сигиала с гироскопа на еипнал, нропорциональный радиусу черпация драги, который зависит от угла наклона черпаковой рамы, измеряемого
при ио.мощи сельсина. Вычислительное ycTpoiiство 5 периодически (в .конце каждого иитеовала дискретности) осуществляет делевие сигиала с измерителя 7 на значение сигнала с тлхогенератора 8, запоминает полученную величину и умиожает на нее текущее значение сигнала скарости двигателя лебе|Дки в течение всего последующего интервала дискретности.
И р е д м е т изобретения
Способ автоматического поддержания оптимального отнощения линейных скоростей бокового перемещения и черпакавой цени драги, основанный на слежени линейной скороети бо.кового иеремещения драги за заданной скороотью черпаковой , отличающийся тем, что, с целью повышения точности поддержания вышеуказагнно.го отнюшения, сигнал обратной связи по скорости бако.вог;0 лер.емещен ия формируют умножением сигнала скорости вращения двигателя лебедки .носовых канатов
на дискретно-постоянный сигнал, получаемый нут-ем деления средней за .интервал дисз ;ретности линейной скорости бокового перемещения драги на значения сигнала скорости вращения двигателя лебедки в конце каждого интервала дискретности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги | 1980 |
|
SU899756A1 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Способ автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги и устройство для его осуществления | 1984 |
|
SU1218360A1 |
| ПРИВОД МНОГОЧЕРПАКОВОЙ ДРАГИ | 1969 |
|
SU233049A1 |
| Адаптивный регулятор производительности добычного аппарата драги | 1985 |
|
SU1270221A1 |
| Способ автоматического управления процессом черпания многочерпаковых драг | 1974 |
|
SU723040A1 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |