1
Изобретение относится к гелиотехнике и может быть использовано -в солнечных установках с рекуператорами солнечной энергии гелиостатного типа, а именно в солнечных электро-: станциях (СЭС) башенного типа.
Известны системы слежения для СЭС башенного типа, в которых гелиостаты управляются электронно-вычислительными машинами D и 21 .
Основным недостатком этих систем является их сложность и высокая стоимость.
Наиболее близкой по технической сущности к изобретению является следящая система, в которой каждый из гелиостатов снабжен индивидуальным оптическим датчиком слежения, а также имеются преобразователи и усилители, выдающие управляющие команды двигателям исполнительных механизмов каждого гелиостата.Ось каждого из датчиков слежения ориентирована по необходимому направлению отраженного
света, а сам датчик установлен на несущей стойке, расположенной перед зеркалом гелиостата.
Сигнал, вырабатываемый датчиком слежения и пропорциональный величине смещения луча от заданного направления, после преобразования и усиления поступает на исполнительные гидродвигатели азимутального и зенитального перемещения ЕзЗ.
Недостатком этой системы также является ее высокая стоимость, так как в том случае возникает необходимость установки порядка 10000 датчиков не на прямых трубчатых стойках, а на изогнутых, и поэтому более жестких, мачтах.
Цель изобретения - упрощение и удешевление системы.
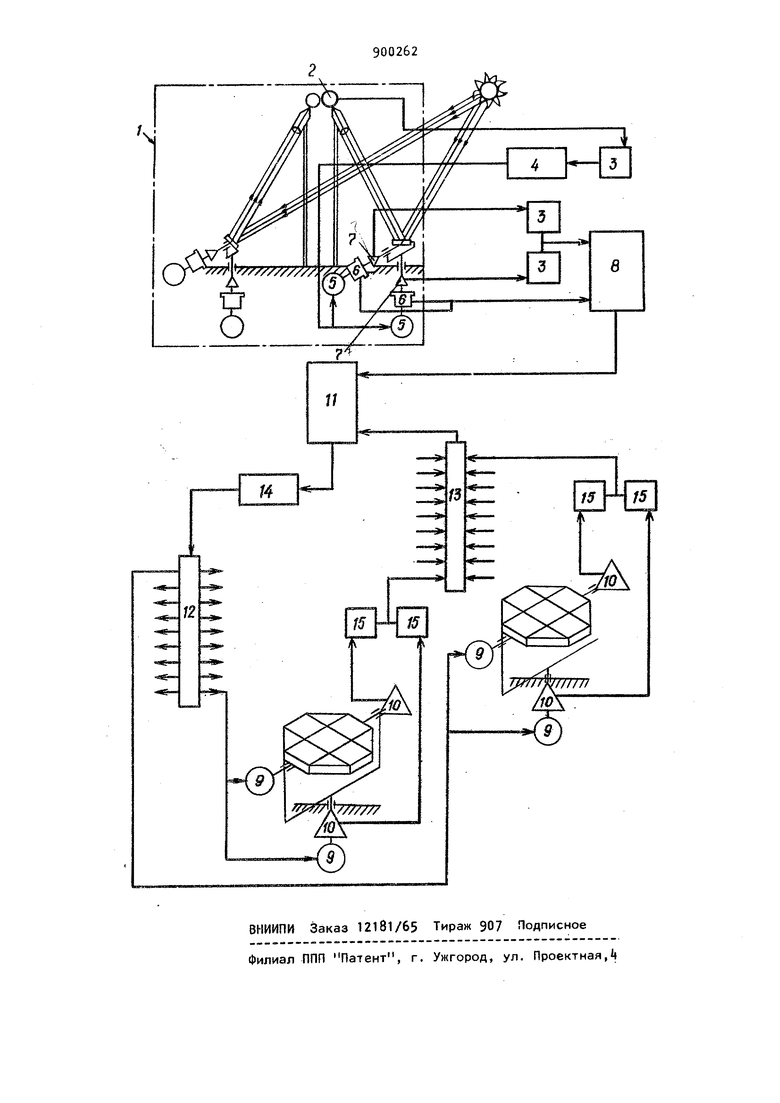
Поставленная цель достигается тем, что в следящую систему, содержащую преобразователи, усилители и исполнительные двигатели гелиостатов,введены сумматоры, коммутаторы и датчи ки положения гелиостатов, а также масштабная модель солнечной электро станции, состоящая из модельных гелиостатов, датчиков положения модел ных гелиостатов, тахогенераторов, исполнигельных двигателей модельных геяибстатов, модельных усилителей, сумматоров и преобразователей и оптических датчиков слежения, каждый из которых установ; ен на модельном гелиостате и подключен через соответствущие модельный преобразователь и модельный усилитель к исполнительным двигателям модельного гелиостата, кинематически связанным с тахогенераторами и датчиками положения модельного гелиостата, выходы которых через соответствующие модел ные преобразователи подключены к первому входу соответствующего модельного сумматора, второй вход которого соединен с выходами тахогенераторов соответствующего модельного гелиостата, а выход - с первым входом сумматора соответстаующей зоны гелиостатного поля электростанции, выходом подключенного через усилител зоны ко входу первого коммутатора зо ны, выходы которого соединены с исполнительными двигателями гелиостато зоны, конематически связанными с датчиками положения гелиостатов,подключенными через соответствующие пре образователи зоны ко входам второго коммутатора зоны, выходом соединенного со вторым входом сумматора зоны Предпочтительным вариантом выполнения модели является такой, когда число модельных гелиостатов равно числу зон гелиостатного поля электростанции J определяемым по признаку одинаковости aakoHOB перемещения гелиостатов. На чертеже представлена функциональная схема следящей системы, .Система содержит масштабную модель 1 с некоторым числом модельных гелиостатов и равное этому числу чис ло структурных групп управления с 8 каждую такую группу входят оптический датчик 2 слежения, модельные пре образователи 3, модельный усилитель k, исполнительные двигатели 5 модель ного гелиостатаJ тахогенераторы 6, датчики положения 7 модельных гелиостатов и модельный сумматор .8. В масштабной модели 1, копирующей натурную СЭС башенного типа, размеры зеркал гелиостатов, площади гели24остатного поля, высота башни и удаления гелиостатов от башни уменьшены по сравнению с соответствующими величинами натурной СЭС в целое число раз, например в 100. Модель идентично натурной СЭС Ориентирована по отношению к частям света. Площадь гелиостатного поля модели разделена на зоны, соответствующие зонам поля СЭС, разбитого по признакам одинаковости законов перемещения зеркальных панелей гелиостатов поля. В центре каждой зоны установлено по одному модельному гелиостату, направленному в точку, соответствующую окну приемника, В указанной точке или на оптической оси, соединяющий центр зеркала каждого модельного гелиостата с центром окна приемника, установлено по одному датчику 2. На каждом модельном гелиостате установлены двигатели 5, по скоростным характеристикам идентичные двигателям гелиостатов поля, а также тахогенераторы 6 и датчики положения 7. У модельного гелиостата двигатели 5 электрически связаны через усилитель 4 и преобразователь 3 с датчиком 2, а тахогенераторы6 и датчики положения 7 электрически связаны с двигателями 9 и датчиками положения 10 натурных гелиостатов СЭС и являются элементами,, при помощи которых осуществляется управление каждой группой гелиостатов СЭС от одного модельного гелиостата. Электрическая связь т тахогенератор-а 6 и датчиков положения 7 каждого модельного гелиостата с двигателями 9 и датчиками положения 10 управляемой группы Натурных гелиостатов. выполнена при помс)щи сумматоров зон I1 и коммутаторов зон 12 и 13. Выход сумматора 11 соединен через усилитель 1 и первый коммутатор 12 с двигателями 9 группы натурных гелиостатов СЭС, а датчики положения 10 этой группы гелиостатов через преобразователи 15 и второй коммутатор 13 подключены к второму входу сумматора 11. Система работает следующим образом. Модельный гелиостат, снабженный элементами непосредственного слежения за Солнцем, производит управляюие движения. При этом на сумматор 8 с модельного гелиостата .поступают ва сигнала: один от датчиков полоения 7, а другой от тахогенераторов 6. На сумматоре 8 происходит суммирование сигналов по первой производной (от тахогенераторов 6) и сигналов, пропорциональных координатным перемещениям зеркальной панели модельного гелиостата. Сумма этих сигналов является эталоном для всех натурных гелиостатов управляемой группы. Сумматор 8 выдает резуль тирую1ц:1Й, эталонный сигнал на сумматор 11, на который в это же время по цепи обратной связи поступает сигнал от датчиков положения 10 одного из натурных гелиостатов. Результирующий сигнал с сумматора 11 поступает через усилитель коммутатор 12 к двигателям 9 натурного гелиостата до тех пор, пока разность поступающих на сумматор 11 сигналов не станет меньше величины порогового уровня. При этом происходит переключение коммутаторов 12 и 13 на работу с другим натурным гелиостатом управляемой группы. Таким образом, в результате-того, что в предложенной системе управление движением зеркальных панелей гелиостатного поля СЭС можно производить от масштабной модели, которая проще и дешевле ЭВМ, а гелиостаты СЭ содержат вместо индивидуальных систем слежения только датчики положения, суммарная стоимость данной сис темы должна быть ниже стоимости систем, использующих как ЭВМ, так и уст ройства непосредственного слежения. Формула изобретения 1. Следящая система для солнечной электростанции, содержащая преобразо ватели, усилители и исполнительные двигатели гелиостатов, отличаю щаяся тем, что, с целью упрощения и удешевления системы, она содер жит сумматоры, коммутаторы и датчики положения гелиостатов, а таюхе масштабную модель солнечной электростан2состоящую из модельных гелиостатов, датчиков положения модельных гелиостатов, тахогенераторов, исполнительных двигателей модельных гелиостатов, модельных усилителей, сумматоров и преобразователей и оптических датчиков слежения, каждый из которых установлен на-модельном гелиостате и подключен через соответствующие модельный преобразователь и модельный усилитель к исполнительным двигателям модельного гелиостата, кинематически связанным с тахогенераторами и датчиками положения модель ного гелиостата, выходы которых через соответствующие модельные преобразователи подключены к первому входу соответствующего модельного сумматора , второй вход которого соединен с выходами тахогенераторов соответствующего модельного гелиостата, а выход - с первым входом сумматора соответствущей зоны гелиостатного поля электростанции, выходом подклю ченного через усилитель зоны ко входу первого коммутатора зоны, выходы которого соединены с исполнительными двигателями гелиостатов зоны, кинематически связанными с датчиками положения гелиостатов, подключенными через соответствующие преобразователи зоны ко входам второго коммутатора зоны, выходом соединенного со вторым входом сумматора зоны. 2. Система поп.1, отли чающаяся тем, что число модельных гелиостатов равно числу зон гелиостатного поля электростанции, определяемым по признаку одинаковости законов перемещения гелиостатов. Источники информации, принятые во внимание при экспертизе 1. Energy solor Conrferg. А appl Cargese. Paris, 1978, с. . 2. Solar ,Energy., 1978, 21, ff 6, c. if91- 96. 3. HEURTFy bulletin d;informations, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЛНЕЧНАЯ БАШЕННАЯ ЭЛЕКТРОСТАНЦИЯ | 2018 |
|
RU2709007C1 |
| ГЕНЕРИРУЮЩАЯ УСТАНОВКА С ДВИГАТЕЛЕМ СТИРЛИНГА | 2013 |
|
RU2527773C1 |
| Солнечная энергетическая установка | 1990 |
|
SU1776936A1 |
| Способ работы солнечной электростанции и устройство для его реализации | 2024 |
|
RU2838739C1 |
| Устройство для юстирования фацет гелиостата | 1981 |
|
SU992943A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Автоматическая система управления полем гелиостатов | 1982 |
|
SU1041825A1 |
| Автоматическая система управления гелиостатом | 1989 |
|
SU1695065A1 |
| Автоматическая система управления гелиостатом | 1990 |
|
SU1763814A1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |