(54) КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| СПОСОБ КОРРЕКЦИИ НЕЛИНЕЙНЫХ ПРЕДЫСКАЖЕНИЙ ЦВЕТОРАЗНОСТНЫХ СИГНАЛОВ СЕКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2206184C2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| Операционный усилитель | 1978 |
|
SU746570A1 |
| Квазиуравновешенный мост для измерения параметров четырехэлементных RLC-двухполюсников | 1986 |
|
SU1404957A1 |
| Сейсмическая станция | 1983 |
|
SU1207291A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
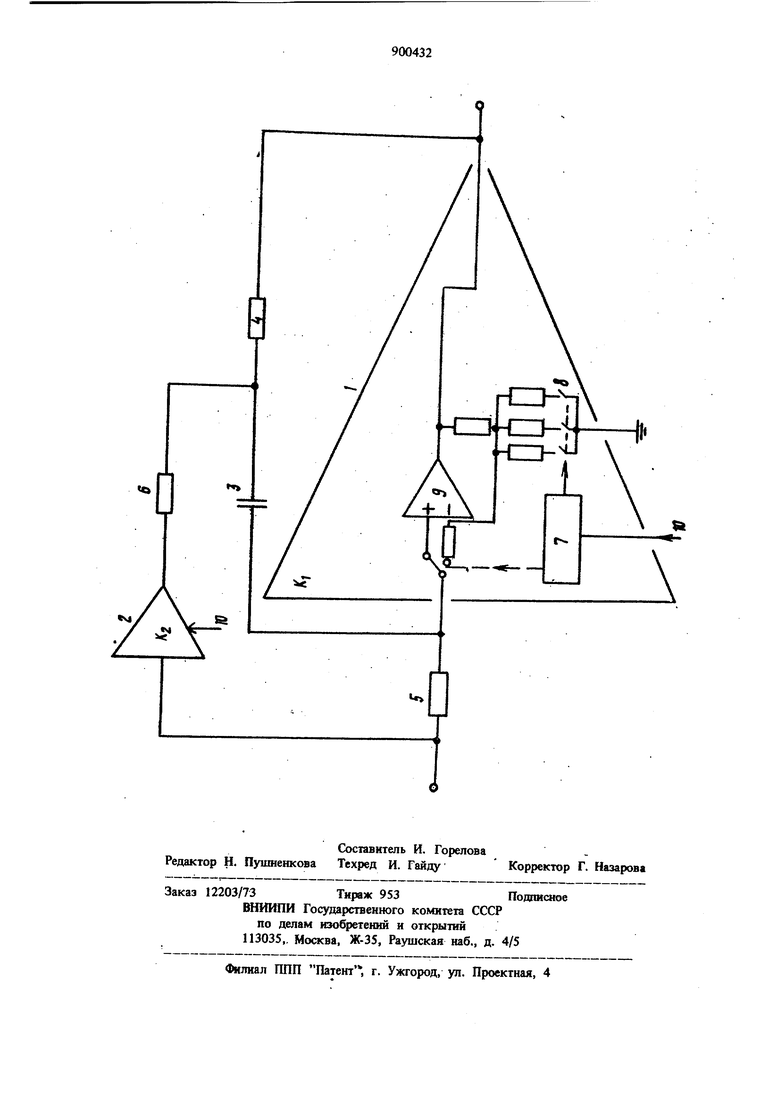
Изобретение относится к автоматике и может быть использовано для коррекции амплитудно-частотных характеристик систем автоматического управления с изменяющимися параметрами. Известен активный RC-фильтр с регулируемой полосой пропускания, выполненный на базе операционнрго усилителя. Вид частотной характеристики и полоса пропускания фильтра могут изменяться путем регулирования сопротивления резисторов, включенных на входе усилителя и в цепи обратной связи 1 Недостаток такого фильтра заключается в том, ПО с его помощью нельзя реализовать требуемую передаточную функцию корректирующего звена системы автоматического управления с изменяющимися параметрами. Наиболее близким к изобретению по технической сущности и достигаемому результату- является корректирующее устройство, содержащее операционный усилитель с управляемым коэффициентом передачи, ко входу которого подключены резистор и конденсатор соединенный через второй резистор с выходом усилителя 2. Недостаток устройства заключается в том, что оно имеет ограниченные области управляемых частот интегрирования и дифференцирования и позволяет регулировать только начальную частоту интегрирования или только конечную частоту даффереицироваиия амплитудно-частотной характеристики устройства, что не позволяет реализовать требуемых передаточных функций корректирующих цепей систем автоматического регулирования с изменяющимися параметрами. Цель изобретения - расширение управляемых областей частот интегрирования и дифференцирования. Поставленная цель достигается за счет того, что корректирующее устройство, содержащее усилитель с управляемым козффициентом передачи, выход усилителя через последовательно соединенные первый рюзистор и конденсатор соединен с его входом, который через второй резистор подключен ко входу устройства, снабжено вторым усилителем с 39 управляемым коэффициенюм передачи, причем вход второго усилителя подключен ко входу устройства, а его выход через третий резистор подключен к точке соединения конденсатора и первого резистора.. На чертеже показана принципиальная элек рическая схема корректирующего устройства. ycrpoffCTBo содержит два усилителя .1 и 2 с управляемыми козффициентами К и К передачи, вход первого из которых через кон денсагор 3 и резистор 4 соединен со своим выходпм, а также через резистор 5 подключен ко входу устройства, вход второго усили теля подключен ко входу устройства, а его выход через резистор 6 соединен с обшей точкой резистора 4 и конденсатора 3. Работа устройстве и вид его амплитудночастотной характеристики определяются соотиошениями постояяммв( времени, входящих в выражение для передаточной функции устройства, которое имеет вяй 1 t Т,Р 1 + TjP R« + KjR где TI p + n Н4Сз - постояннгв времени, определяющая конечную -частоту to, -i- интегрирования для случая Т,) TI Tj и началЫ1гую частоту дяфференцировання дпя случая (Т,) Tj амплитуд но-частотной характеристики устройстгаа; TJ - (1-K,) + Р.Вл Cj R4 + Re постоянная времени, опоедаляющая началь ную частоту 02 - шпгегрярованкя дл случая СТ)) TJ и конечн)по частоту дифференцирования для слчая(Т1) TJ амплитудно-частотной характеристики устрой ства; К), Kj - управляемые коэффициенты пе редачи по постоянному току уси лителей 1 и 2; R4-Re - величина сопротивлений резисторов 4-6; Сз - емкость конденсатора 3. Из выражений для постоянных времени TI и TJ видно, что прн изменении коэффициенто передачи усилителей 1 и 2 имеет место независимое управление частотами сопряжения и П{Я1 работе устройства как в режиме интегрирования, так и в режиме дифференцирования. . Управление усилителем осуществляется с помощью управляющих кодов, подступающих на управляющие входы 10. При поступлении на управляющие входы 0 усилителей 1 и 2 кодов управления, последние через дешифратор 7, воздействуя на электронные ключи 8, , осуществляют формирование требуемых значеняй величии коэффициентсж передачи операционных усилителей 9 и их знака, а следовательно, и требуемых значений постоянных времени Т) и Та. При этом формируется необходимая дпя работы системы управления область днфференцируемых или интегрируемых частот. Возможность управления широкими областями частот интегрирования или дифференцирования позволяет получить оптимальные параметры систем автоматического управления ..с переменными параметрами за весь цикл управления. Формула изобретения Корректирующее устройство, содержащее усилитель с управляемым коэффитшентом пе|М1цачи, выход усилителя через последоватсльнб чх единенные первый резистор и конденсатор соединен с его. входом, который через второй резистор подключен ко входу устройства, отличающееся тем, что, с целью расширения управляемьп областей частот интегрирования и дифференцирования, снабжено вторым усилителем с управляемым коэффициентом передав, причем вход второго усилителя подключен ко входу устройства, а его выход через третий резистор подключен к точке соеданения конденсатора и первого резистора. Источники ииформации, принятые во внимание при экспертизе 1.Патент США N 3946328, кл. 393-19, 1975. 2.Марше Ж, Операциошше усилители и их применение, М., Энергия, 1974, с. 75.
