Изобретение относится к вакуумной технике и предназначено для использования в устройствах для точного перемещения изделий в вакуумных камерах аналитического и технологического оборудования.
Целью изобретения является повышение надежности и точности перемещения координатного вакуумного столика.
Изобретение иллюстрируется графическими материалами.
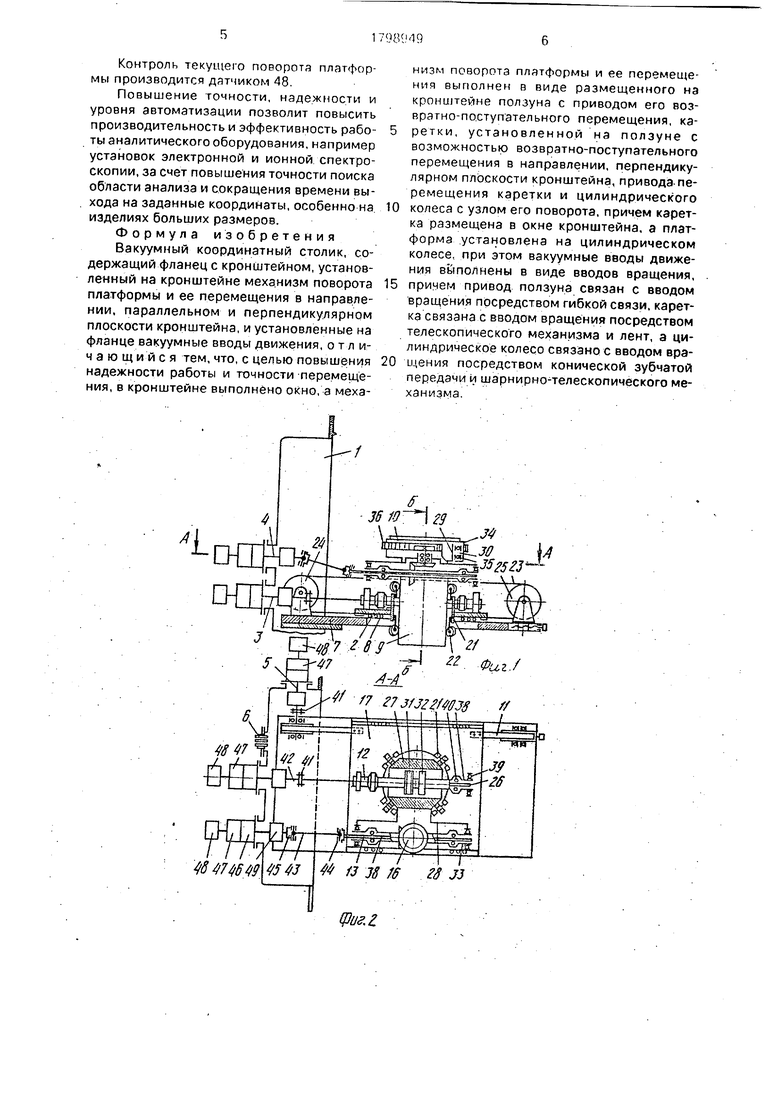
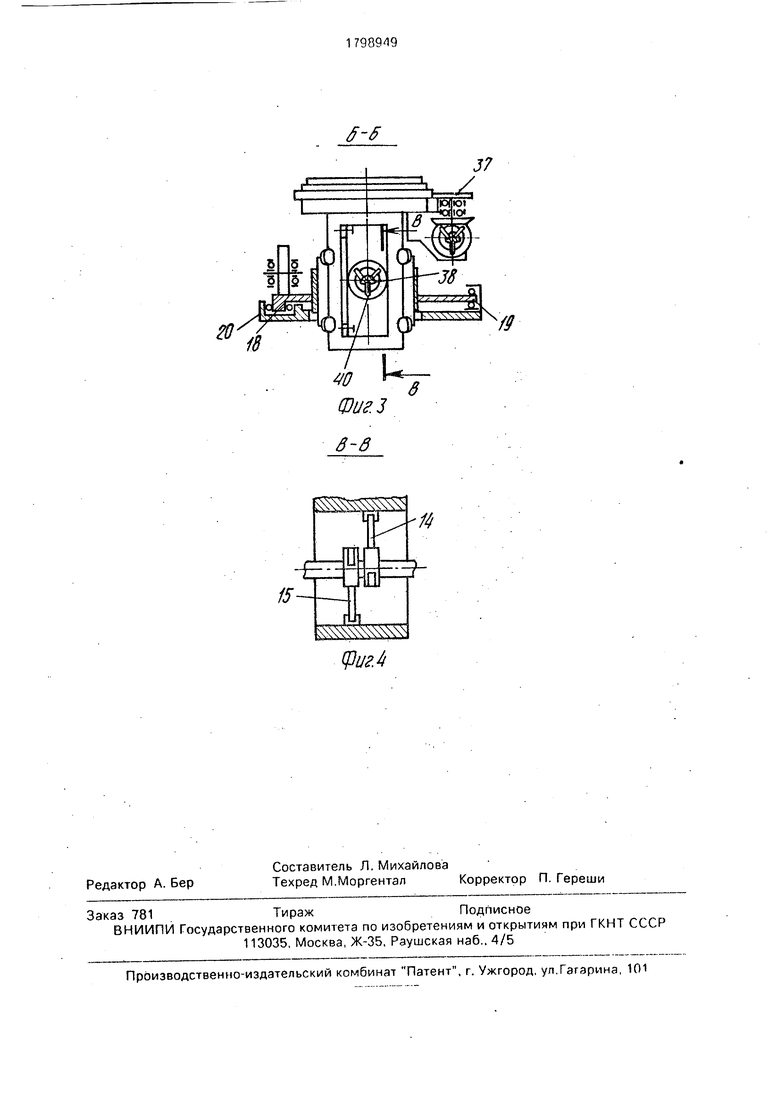
Конструкция и кинематика вакуумного координатного столика представлены на фиг, 1; на ф.иг.2 -- разрез по А-А; на фиг.З - разрез по Б-Б, на фиг.4 - разрез по В-В.
Вакуумный координатный столик содержит следующие основные части: фланец 1, устройство для перемещения 2, вакуумные вводы движения 3, 4, 5.
Фланец 1 представляет собой цилиндрическую обечайку, имеющую с одной стороны крышку, а с другой - кольцевой диск с зубом для вакуумного уплотнения и отверстиями для подсоединения к вакуумной камере установки.
На крышке расположены патрубки для установки вакуумных вводов движения 3, 4 и гермовводов 6.
На цилиндрической обечайке расположен патрубок для подсоединения вакуумного ввода 5 движения.
На фланце жестко закреплен кронштейн 7 для крепления устройства перемещения 2.
Устройство для перемещения 2 состоит из горизонтальной каретки 8, вертикальной каретки 9, платформы поворота 10, ленточной передачи 11 телескопического 12 и шар- нирно-телёскопичёскогр 13 механизмов, гибких лент 14 и 15, соединяющих телескопический механизм 12 с вертикальной кареткой 9, и конической передачи 16, обеспечивающей движение платформы поворота 1.0.
Горизонтальная каретка 8 представляет собой плиту 17 с направляющими 18 и 19. Направляющая 18 имеет две боковые дорожки, контактирующие с шариками 20, установленными в сепараторы и обеспечивающими возможность продольного перемещения по оси X. Направляющая 19 определяет горизонтальное расположение плиты 17 за счет контактирования с шариками, расположенными в направляющей..
Nj Ю 00
ю о
В средней части плиты 17 имеется цилиндрическое отверстие, в котором установлены стойки 21 с вращающимися роликами 22, в которых базируется вертикальная каретка 9.
Со стороны продольной направляющей 18 плита соединена с ленточной передачей
11. представляющей ленту 23, огибающую шкивы 24 и 25, причем два конца ленты закреплены на плите 17, а средняя часть закреплена на шкиве 24. Шкив 25 обеспечивает возможность натяжения ленты. Оба шкивы установлены на кронштейне 7,
На плите 17 расположена вращающаяся втулка 26 телескопического механизма
12.
Вертикальная каретка 9 состоит из четырехгранной призмы 27 и кронштейна 28. На верхнем основании призмы 27 закреплено цилиндрическое кольцо 29, в котором установлена подшипниковая опора 30 платформы 10. В середине призмы 27 имеется окно, через которое проходит втулка 26 телескопического механизма 12, С помощью лент 14 и 15 призма соединена со шкивами 31 и 32, установленными на втулке 26. Призма 27 по граням базируется в роликах 22, обеспечивающих возможность ее свободного перемещения по вертикали.
Кронштейн 28 жестко соединен с приз- мой 27 и служит для установки втулки 33 шарнирно-телескопического механизма 13 и коническо-цилиндрической передачи 16.
Платформа поворота 10 представляет собой диск 34 с цилиндрическим ободом. Внутри диска расположены подшипники качения 35, с помощью которых платформа установлена на вертикальной каретке 9, а снаружи - зубчатое цилиндрическое колесо
36. находящееся в зацеплении с шестерней
37. жестко соединенной с конической пере- дачей 16.
Ленточная передача 11 обеспечивает кинематическую связь ввода движения 5 с горизонтальной кареткой, основные эле- менты передачи описаны выше.
Телескопический и шарнирно-телеско- пический механизмы 12 и 13 предназначены для передачи движения на подвижные горизонтальную и вертикальную каретки 8 и 9.
Телескопический механизм 12 состоит из вала 38, имеющего треугольное сечение, и втулки 26, установленной в подшипниках 39, закрепленных на горизонтальной карет- ке 8. Во втулке 26 расположены два ряда подшипников 40 с осью вращения перпендикулярно оси втулки 26. Каждый из подшипников 40 касается наружным кольцом соответствующей грани валз 3В. Вал 33 одним концом соединен через муфту 41 с выходным валом 42 вакуумного ввода вращения 3.
Шарнирно-телескопический механизм 13 отличается от телескопического механизма 12 тем, что вал 38 соединен с валом вакуумного ввода вращения через вал 43,. имеющий шарниры 44 и 45.
Вакуумные вводы движения выполнены по одинаковой схеме и состоят из вакуумного ввода вращения 46, двигателя 47 и датчика 48. .
В качестве вакуумного ввода вращения используется вакуумный волновой ввод вращения или сильфонный ввод вращения с редуктором 42, обеспечивающим понижение числа оборотов, расположенным в вакуумном объеме.
Для контроля исходного положения кареток 8 и 9 и платформ 10 имеются датчики (на фиг. не показаны), расположенные на устройстве перемещения 2 и соединенные с гермовводами 6, расположенными на фланце 1.;
Координатный столик работает следующим образом.
Исходное положение кареток 8, 9 и платформы 10 определяется датчиками исходного положения (на фиг. не показаны).
При подаче напряжения от блока управления на двигатель 47 ввода движения 5 вращение от двигателя 47 через сильфонный ввод 46, муфту 41, шкив 24 передается на ленту 11, соединенную с кареткой 8.
В зависимости от направления вращения двигателя каретка 8 движется вперед или назад. Контроль текущего перемещения осуществляется с помощью датчика 48.
Движение вертикальной каретки 9 вверх и вниз производится от двигателя 47 ввода движения 3 через вакуумный ввод вращения, муфту 41, телескопический механизм 12 и ленты 14 и 15. При этом.вращение вала 38 через подшипники 40 передается на втулку 26, на которой установлены шкалы 31 и 32, соединенные с помощью лент 14 и 15 с вертикальной кареткой.
Поворот шкивов 31 и 32 обеспечивает вертикальное перемещение каретки 9. Контроль перемещения осуществляется датчиком 48.
Поворот платформы 10 осуществляется от вакуумного ввода движения 4. При этом вращение от двигателя 47 через шарнирно- телескопический механизм 13 передается на коническую передачу 16, которая приводит в движение цилиндрическую шестерню 37, вращение последней обеспечивает поворот колеса 36, установленного на платформе 10.
Контроль текущего поворота платформы производится датчиком 48.
Повышение точности, надежности и уровня автоматизации позволит повысить производительность и эффективность работы аналитического оборудования,например установок электронной и ионной спектроскопии, за счет повышения точности поиска области анализа и сокращения времени выхода на заданные координаты, особенно на изделиях больших размеров.
Формула изобретения
Вакуумный координатный столик, содержащий фланец с кронштейном, установленный на кронштейне механизм поворота платформы и ее перемещения в направлении, параллельном и перпендикулярном плоскости кронштейна, и установленные на фланце вакуумные вводы движения, о т л и- ч а ю щ и и с я тем, что, с целью повышения надежности работы и точности перемещения, в кронштейне выполнено окно, а механизм поворота платформы и ее перемещения выполнен в виде размещенного на кронштейне ползуна с приводом его воз- вратно-по.ступательного перемещения, каретки, установленной на ползуне с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном плоскости кронштейна, привода-перемещения каретки и цилиндрического
колеса с узлом его поворота, причем каретка размещена в окне кронштейна, а плат- Форма .установлена на цилиндрическом колесе, при этом вакуумные вводы движения выполнены в виде вводов вращения,
причем привод ползуна связан с вводом вращения посредством гибкой связи, каретка связана с вводом вращения посредством телескопического механизма и лент, а цилиндрическое колесо связано с вводом вращения посредством конической зубчатой передачи и шарнирно-телескопического механизма.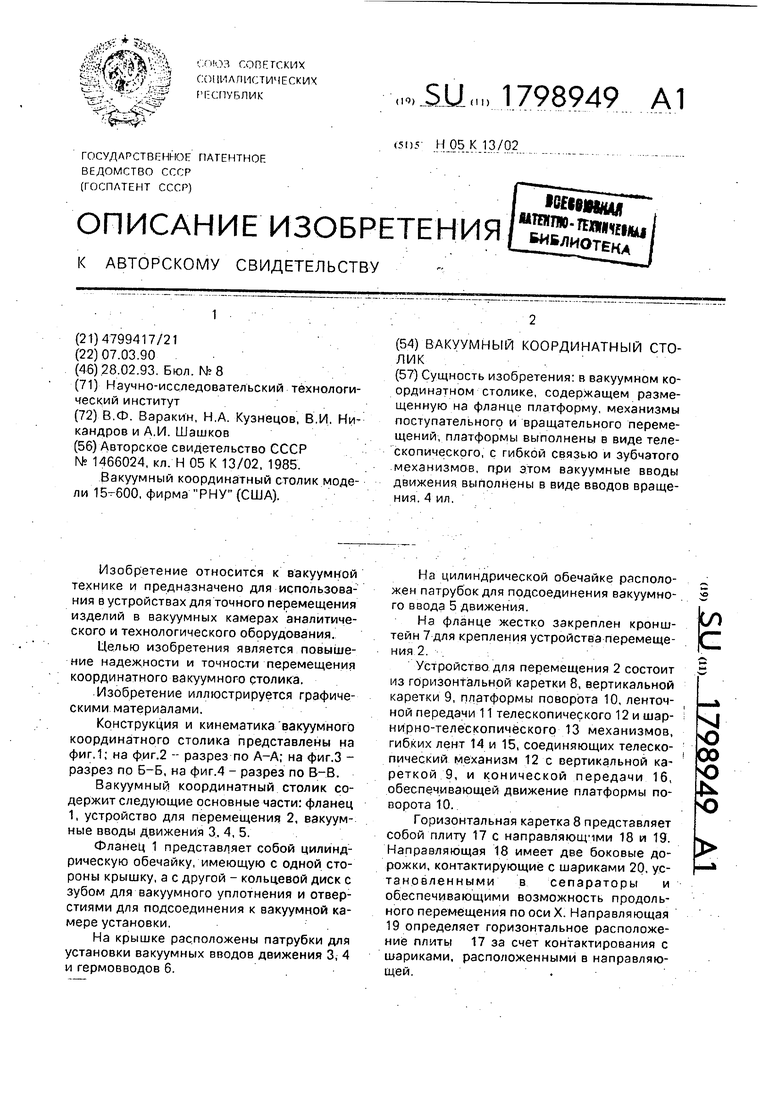

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2044628C1 |
| Устройство для шлифования деталей | 1984 |
|
SU1197820A1 |
| УСТАНОВКА ПЕРЕТЯГИВАНИЯ ИЗДЕЛИЙ ИЗ СТЕКЛОЗАГОТОВОК | 2021 |
|
RU2777030C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Прибор для контроля формы обувных колодок | 1979 |
|
SU843934A1 |
| УСТРОЙСТВО ДЛЯ СМАТЫВАНИЯ В БОБИНЫ И РАСКЛАДКИ ГИБКИХ ПОЛИВНЫХ ТРУБОПРОВОДОВ СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2395957C1 |
| Сверлильно-клепальный автомат | 1989 |
|
SU1660828A1 |
Сущность изобретения: в вакуумном координатном столике, содержащем размещенную на фланце платформу, механизмы поступательного и вращательного перемещений, платформы выполнены в виде телескопического, с гибкой связью и зубчатого .механизмов, при этом вакуумные вводы движения выполнены в виде вводов вращения. 4 ил.
48474649 4543 № t3 Jg fff гЗ JJ
фи Z
jLi 36 Ю 29
. - М ESiiS M и
z №& 358t3 фи г. 4
| Устройство для подачи плоских прямоугольных изделий,преимущественно печатных плат | 1985 |
|
SU1466024A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
