(54) ГРУЗОЗАХВАТНАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Траверса-кантователь | 1980 |
|
SU870338A1 |
| Вакуумная грузозахватная траверса | 1979 |
|
SU823258A1 |
| Вакуумная грузозахватная траверса | 1983 |
|
SU1278286A1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| КАНТОВАТЕЛЬ | 2009 |
|
RU2392216C1 |
| Траверса | 1989 |
|
SU1726350A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР | 2009 |
|
RU2433017C2 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765194C1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к грузозахватным системам.
Известна грузозахватная система, содержащая подвешиваемую на крюк крана траверсу, смонтированный на ней ресивер, вакуумные захваты, прикрепленные посредством подвесок к траверсе 1.
Однако известной транспортной системой невозможно захватывать изделия различных габаритов.
Цель изобретения - повышение эффективности в эксплуатации.
Для достижения указанной цели грузозахватная система снабжена для разведения траверсы установленной на земле опорой, содержащей стойки с наконечником и горизонтальную балку с ограничителями максимального разведения траверсы, а траверса выполнена из двух ферм, шарнирно соединенных с ресивером, и снабжена гидроцилиндрами, корпус каждого из которых прикреплен к одной ферме, а шток к другой, при этом полости каждого гидроцилиндра соединены между собой и с полостями других гидроцилиндров с возможностью одновременного перекрывания.
Кроме того, подвески вакуумных захватов могут быть закреплены к фермам шарнирно.
На стойках опоры могут быть закреплены ролики.
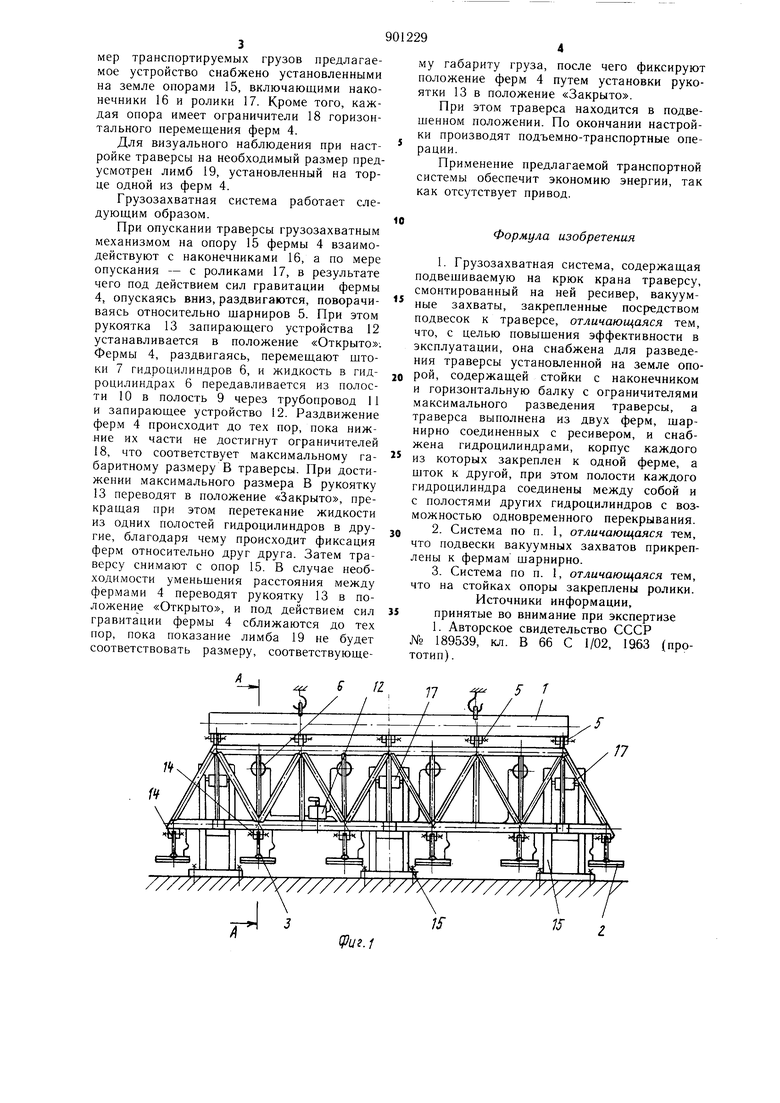
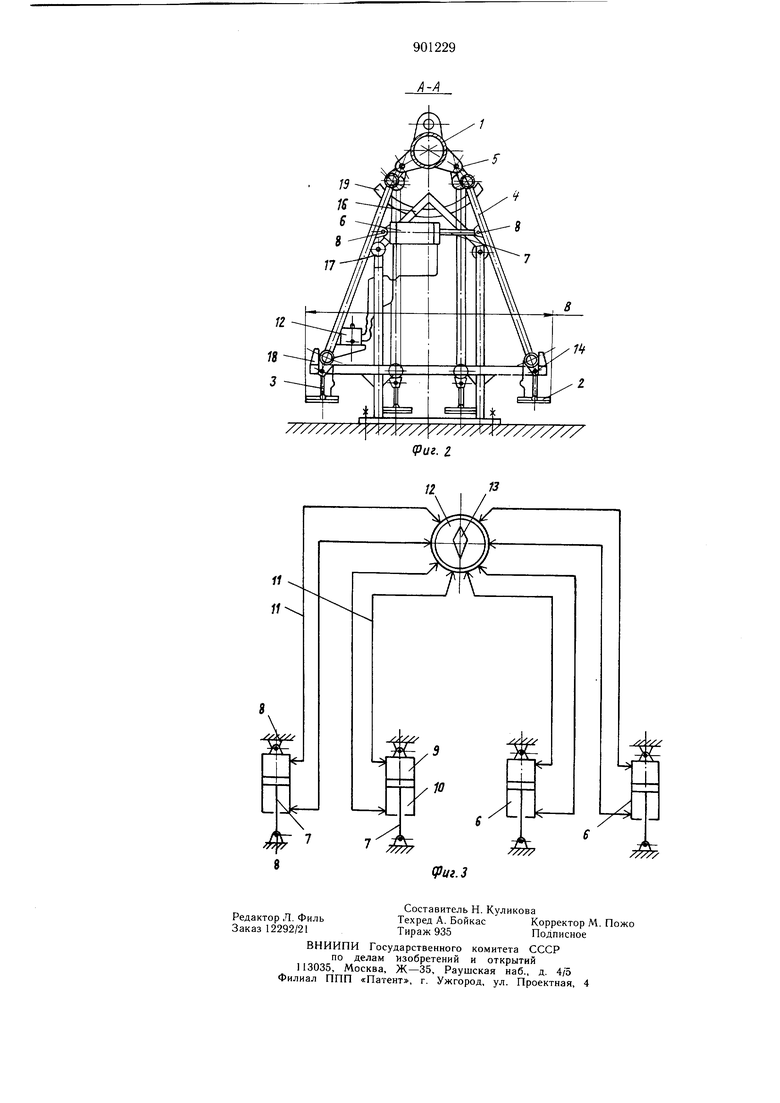
5 На фиг. 1 показана грузозахватная система, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема гидросистемы. Грузозахватная система содержит ресивер 1 и вакуумные захваты 2, закреп,Q ленные посредством подвесок 3 к траверсе, выполненной в виде двух ферм 4, прикрепленных по всей длине к ресиверу 1 посредством шарниров 5. Формы 4 соединены между собой гидроцилиндрами 6 со штоками 7 при помощи шарниров 8.
15 Полости 9 и 10 каждого гидроцилиндра 6 сообщаются между собой и полостями других гидроцилиндров 6 посредством трубопроводов 11 и запирающего устройства 12, имеющего рукоятку 13 управления. На
2Q фермах 4 посредством щарниров 14 закреплены подвески 3 вакуумных захватов 2 с возможностью углового перемещения относительно этих ферм в плоскости их поперечного сечения. Для настройки траверсы на максимальный габаритный размер транспортируемых грузов предлагаемое устройство снабжено установленными на земле опорами 15, включающими наконечники 16 и ролики 17. Кроме того, каждая опора имеет ограничители 18 горизонтального перемещения ферм 4. Для визуального наблюдения при настройке траверсы на необходимый размер предусмотрен лимб 19, установленный на торце одной из ферм 4. Грузозахватная система работает следующим образом. При опускании траверсы грузозахватным механизмом на опору 15 фермы 4 взаимодействуют с наконечниками 16, а по мере опускания - с роликами 17, в результате чего под действием сил гравитации фермы 4, опускаясь вниз, раздвигаются, поворачиваясь относительно шарниров 5. При этом рукоятка 13 запирающего устройства 12 устанавливается в положение «Открыто. Фермы 4, раздвигаясь, перемещают щтоки 7 гидроцилиндров 6, и жидкость в гидроцилиндрах 6 передавливается из полости 10 в полость 9 через трубопровод 11 и запирающее устройство 12. Раздвижение ферм 4 происходит до тех пор, пока нижние их части не достигнут ограничителей 18, что соответствует максимальному габаритному размеру В траверсы. При достижении максимального размера В рукоятку 13 переводят в положение «Закрыто, прекращая при этом перетекание жидкости из одних полостей гидроцилиндров в другие, благодаря чему происходит фиксация ферм относительно друг друга. Затем траверсу снимают с опор 15. В случае необходимости уменьшения расстояния между фермами 4 переводят рукоятку 13 в положение «Открыто, и под действием сил гравитации фермы 4 сближаются до тех пор, пока показание лимба 19 не будет соответствовать размеру, соответствующе(Риг.1 му габариту груза, после чего фиксируют положение ферм 4 путем установки рукоятки 13 в положение «Закрыто. При этом траверса находится в подвешенном положении. По окончании настройки производят подъемно-транспортные операции. Применение предлагаемой транспортной системы обеспечит экономию энергии, так как отсутствует привод. Формула изобретения 1. Грузозахватная система, содержащая подвешиваемую на крюк крана траверсу, смонтированный на ней ресивер, вакуумные захваты, закрепленные посредством подвесок к траверсе, отличающаяся тем, что, с целью повышения эффективности в эксплуатации, она снабжена для разведения траверсы установленной на земле опо рой, содержащей стойки с наконечником и горизонтальную балку с ограничителями максимального разведения траверсы, а траверса выполнена из двух ферм, шарнирно соединенных с ресивером, и снабжена гидроцилиндрами, корпус каждого из которых закреплен к одной ферме, а шток к другой, при этом полости каждого гидроцилиндра соединены между собой и с полостями других гидроцилиндров с возможностью одновременного перекрывания. 2.Система по п. 1, отличающаяся тем, что подвески вакуумных захватов прикреплены к фермам щарнирно. 3.Система по п. 1, отличающаяся тем, что на стойках опоры закреплены ролики. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 189539, кл. В 66 С 1/02, 1963 (прототип) .
13 IS
-/
f
y////////
