Изобретение относится к захватным органам манипуляторов и может быть использовано при выполнении погрузочно- разгрузочных и монтажных работ с грузами сложной конфигурации, в частности для перегрузки, кантования и укладки железобетонных колесортбойных дорожных брусьев. Известна захватная траверса, присоединенная к механизму вращательного перемещения (ротатору), установленному на наконечнике манипулятора, содержащая корпус с вакуумными захватами, сообщенными с источником вакуума, и систему управления ими.
Наиболее близкой к предлагаемой является захватная траверса манипулятора, присоединенная к механизму вращательного перемещения, установленному на наконечнике манипулятора, содержащая корпус с вакуумными захватами, сообщенными с источником вакуума, и систему управления ими.
Известная захватная траверса, в основном, предназначена для выполнения монтажных, погрузочных и разгрузочных работ со строительными грузами.
К недостаткам известной захватной траверсы относятся возможность захвата изделия вакуумными захватами только за одну плоскость, что при небольшой ее площади уменьшает эффективную площадь ва- куумных захватов и грузоподъемность траверсы и тем самым снижает надежность работы траверсы и безопасность ее применения, а также невозможность захвата и перегрузка изделий сложной конфигурации, имеющих поверхности небольшой площади как, например, колесоотбойные дорожные брусья, перегрузка которых осуществляется весьма трудоемкими и опасными для рабочих способами при помощи канатных стропов.
Целью изобретения является повышение удобства в эксплуатации.
Указанная цель достигается тем, что траверса, содержащая корпус с вакуумными захватами/сообщенными с источником вакуума, и гидросистему управления захватами, снабжена гидроцилиндрами, корпуса одних из которых шарнирно соединены с упомянутым средством, а штоки шарнирно связаны е корпусом, при этом к боковой стороне корпуса шарнирно присоединены часть вакуумных захватов, поворотных относительно корпуса при помощи гидроцилиндров, корпуса которых установлены шарнирно относительно корпуса траверсы. а штоки шарнирно соединены с захватами.
На фиг.1 изображена захватная траверса, общий вид: на фиг.2 - разрез А-А на
ф иг.1; на фиг.З - разрез Б-Б на фиг.2: на фиг.4 - вакуумная схема траверсы; на фиг.5 - гидравлическая схема.траверсы: на фиг.6- схема работы.
Захватная траверса состоит из корпуса
1, двух неповоротных вакуу-мных захватов 2, прикрепленных к корпусу, и двух поворотных в вертикальной плоскости вакуумных захватов 3. Поворотные захваты 3 шэрнир0 но присоединены к корпусам неповоротных захватов 2. Для их поворота применены гидроцилиндры 4, корпуса которых, при помощи шарниров 5 установлены шзрнирно относительно корпуса траверсы 1, а штоки
5 гидроцилиндров 6 при помощи шарниров 7 шарнирно соединены с захватами 3,
Траверса снабжена двумя независимо управляемыми гидроцилиндрами-оттяжками 8, штоки которых шарнирно связаны че0 рез проушины 9 с корпусом траверсы .1. Корпуса гидроцилиндров-оттяжек 8 через серьгу 10 шарнирно соединены с механизмом 11 вращательного перемещения, который смонтирован на наконечнике
5 манипулятора (не показан) при помощи шарнирной подвески 12. Для ориентирования.траверсы относительно захватываемого груза ее корпус снабжен выдвижными упорами 13, которые после выдвижения на не0 обходимый разрез фиксируются в этом положении фиксаторами 14, устанавливаемыми в отверстия 15.
Для автоматического подключения ва- . куумных захватов к вакуумной системе и
5 отключения от нее захваты снабжены, стержневыми клапанами 16, подпружиненными пружинами 17, установленными в каналах захватов, соединяющих их вакуум-проводами с источником вакуума.
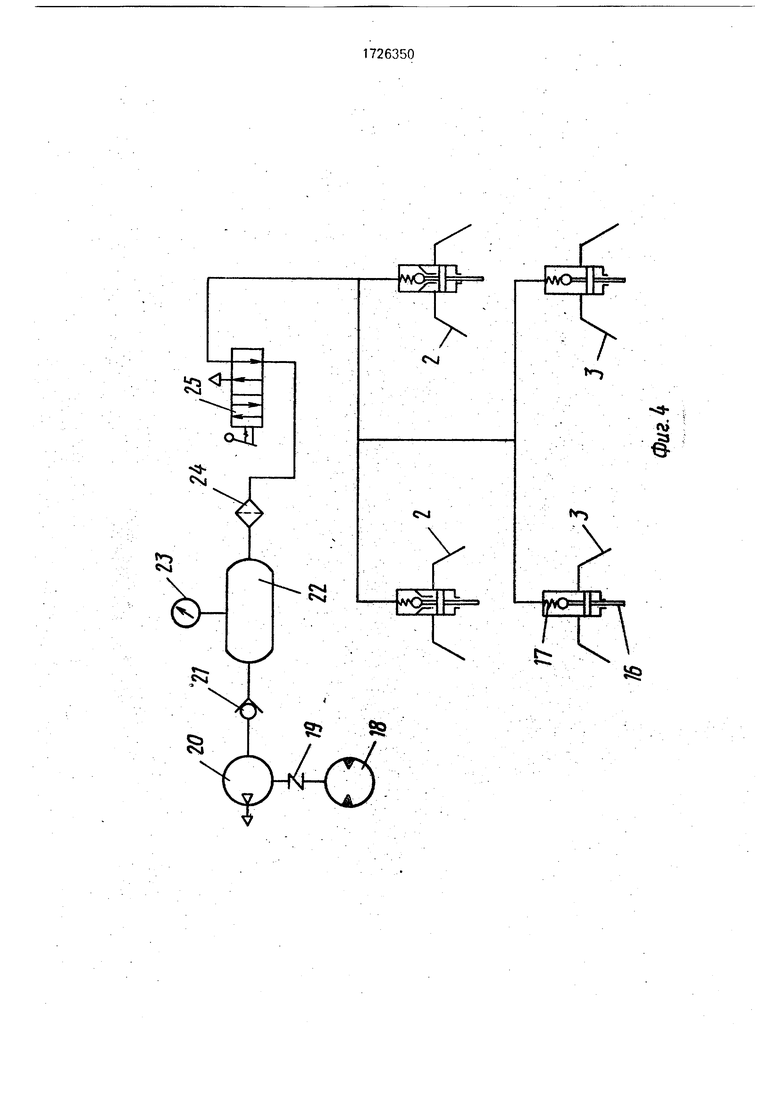
0 Вакуумная система захватной траверсы (фиг.4) включает гидромотор 18, соединенный муфтой 19 с вакуумным насосом 20, который через обратный клапан 21 соединен с ресивером 22, а ресивер через фильтр.
5 24 вакуум-проводом соединен с вакуумными захватами 2 и 3. Для управления работой вакуумных захватов служит кран 25 управления. Вакуум-насосное оборудование, ресивер и кран управления захватами
0 расположены на раме манипулятора (не показан). Для контроля за разряжением воздуха в вакуумной системе и вакуумных захватах служит вакуумметр 23,
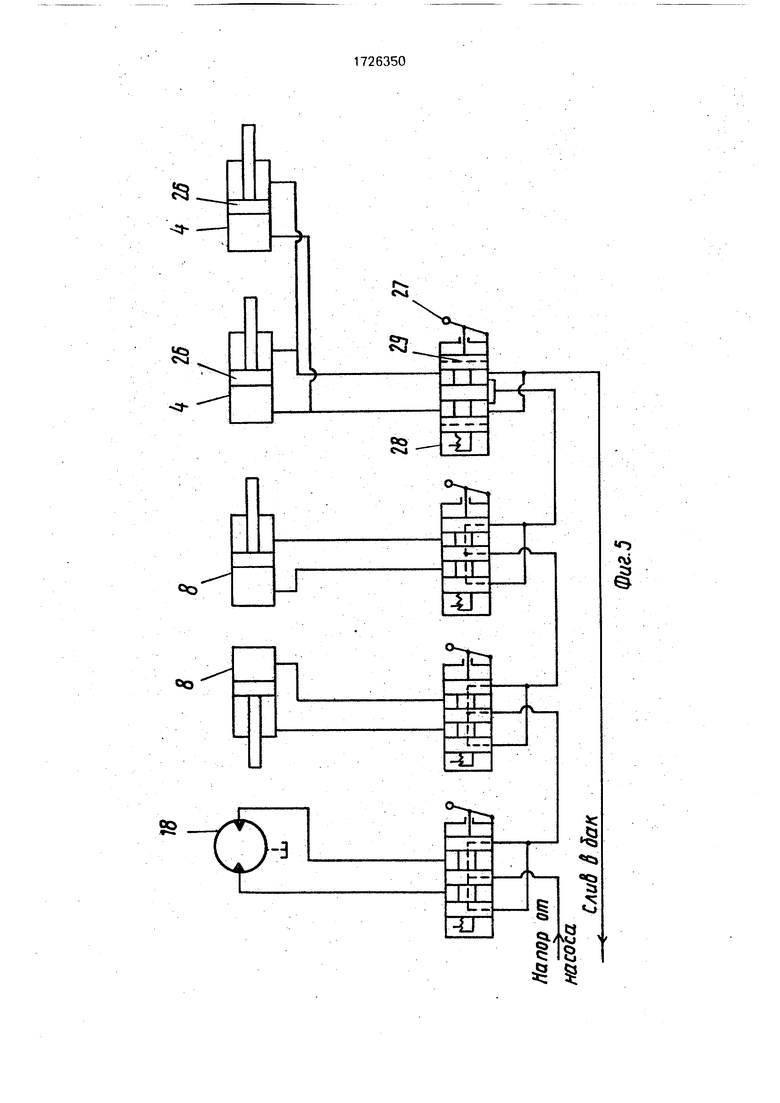
Гидравлическая схема захватной тра5 версы (фиг,5) содержит гидроцилиндры-оттяжки 8 и гидроцилиндры 4 для поворота вакуумных захватов 3. Для обеспечения автоматического прижатия захватов 3 к повер- хности изделия при изменении его положений в пространстве поршни 26 гидроцилиндров 4 устанавливают в плаваю- щее положение, для чего рукоятка 27 гидрораспределителя 28 установлена в нейтральное положение, а золотник 29 ррраспределителя при этом занимает пл а- вающее положение.:
Захватная траверса работает следующим образом.
При погрузке-разгрузке изделий из штабеля в транспортное средство, напри- мер на платформу автомобиля, или из транспортного средетва на землю и т.д. траверса механизмом 11 вращательного перемещения разворачивается в горизонтальной плоскости и наводится на захваты- ваемое изделие 30, при этом выдвижные упоры 13 установлены на размер, соответствующий длине.изделия, и зафиксированы фиксаторами 14.
При контакте неповоротных вакуумных захватов 2 с горизонтальной плоскостью изделия (фиг.6) стержневые клапаны 16 отжимают пружину 17. через каналы в корпусе клапана соединяют вакуумные захваты (через вакуум-проводы) с источником вакуума (ресивером). В вакуумных захватах создается вакуум и происходит захват изделия за горизонтальную плоскость.
Выдвижением штоков б гидроцилиндров 4 производят поворот вакуумных захва- тов 3 относительно корпуса 1 и корпусов неподвижных вакуумных захватов 2 и до их контакта с вертикальной плоскостью изделия. В этом случае происходит захват изделия в вертикальной плоскости захватами 3 аналогично захвату вакуумными захватами 2, описанному выше (фиг.6, положение а). Изделие, погруженное или разгруженное траверсой/устанавливается в требуемое положение (в штабель, -на землю и т.д.), для освобождения изделия от вакуумных захватов в них подается воздух из атмосферы и происходит их развакуумирование. Затем цикл работы траверсы повторяется.
При захвате изделия, лежащего на зем- ле, и его кантовании может оказаться, что изделие находится под определенным уг- лом относительно горизонта в вертикаль ной плоскости, Выдвигая шток одного гидроцилйндра-оттяжки 8 и вытягивая шток другого гидроцилиндра-оттяжки 8 и наоборот, корпус 1 траверсы с ее элементами изменяет угол своего наклона в вертикальной плоскости соответственно углу наклона, под которым находится захватываемое из- делие (фиг.6, положение б). Траверса наво- дится на захватываемое изделие, лежащее на землю, под углом относительно горизонта в вертикальной плоскости с измененным положением корпуса 1. при этом выдвижные упоры 13. раздвинутые на соответстпу- ющую длину захватываемого изделия, направляют траверсу.
Гидроцилиндрами 4 производят выверку угла наклона плоскости касания поворотных вакуумных захватов 3 и производят их прижим к поверхности изделия. Происходит захват изделия за горизонтальную плоскость аналогично описанному. Затем траверсу с захваченным изделием поднимают верти- кально, при этом рукоятку 27 гидрораспределителя 28 управления гидроцилиндрами 4 . устанавливается в нейтральное положение и при подъеме траверсы с изделием штоки б с поршнями этих гидррцилиндров находятся в плавающем положении, при котором обе полости гидроцилиндров .связаны со сливом гидросистемы/Это необходимо для свободного автоматического поворачи- вания вакуумных захватов 3 относительно корпуса 1 траверсы. Осуществляя подъем траверсой изделия 30 с земли, производят выдвижение штока одного из цилиндров-оттяжек 8 и выдвижение штока другого гидроцилиндра-оттяжки 8 в такое положение, при котором траверса с изделием выравнивается относительного горизонта в вертикальной плоскости (см. положение на фиг.).
Затем производят подъем траверсы с захваченным изделием (кантование) до тех пор, пока вакуумные захваты 3 не коснутся плоскости изделия, которая при кантовании из вертикальной плоскости переходит в горизонтальную плоскость (фиг.6, положение в). При этом происходит захват вакуумными захватами 2 изделия за эту плоскость аналогично описанному выше.
При этом положение захватов соответствует положению а на фиг.6. Затем цикл работы траверсы повторяется.
Формула из обретения
Траверса, содержащая корпус с вакуумными захватами, сообщенными с источником вакуума, гидросистему управления вакуумными захватами и средство для присоединения к механизму вращательного перемещения грузоподъемного механизма, о т л и ч а ю щ а я с я тем, что, с целью повышения удобства в эксплуатации, часть захватов шарнирно присоединена к боковинам корпуса, а траверса снабжена гидроцилиндрами, корпуса одних из которых присоединены к упомянутому средству, а штоки связаны с корпусом, а корпуса других шарнирно связаны с корпусом, а штоки - с боковыми вакуумными захватами, при этом поршневая и штоковая полости вторых гидроцилиндров сообщены со сливом гидроситемы при нейтральном положении олотника.
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| Манипулятор | 1984 |
|
SU1333567A1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР | 2009 |
|
RU2433017C2 |
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1030292A1 |
| Вакуумная грузозахватная траверса | 1974 |
|
SU499203A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |


Изобретение относится к захватным органам манипуляторов, например, для безопасных перегрузок изделий сложной конфигурации из железобетона. Цель изобретения - повышение надежности и безопасности работы. Траверса содержит корпус 1 с вакуумными захватами, сообщенными с источником вакуума, расположенным на манипуляторе. Захваты 3 выполнены поворотными при помощи гидроцилиндров 4. Траверса снабжена двумя независимо управляемыми гидроцилиндрэ- ми-оттяжками 8, корпуса которых через серьгу 10 шарнирно соединены с механизмом 11 вращательного перемещения манипулятора, а их штоки .шарнирно связаны через проушины 9 с корпусом 1 траверсы. Корпус 1 траверсы снабжен выдвижными упорами 13с фиксаторами 14. Вакуумные захваты имеют подпружиненные стержневые клапаны 16, сообщающиеся с вакуумной системой траверсы. При контакте неповоротных вакуумных захватов с изделием осуществляется его захват за горизонтальную плоскость, а при контакте захватов Зс изделием захват его осуществляется за вертикальную его плоскость. При захвате изделия, находящегося под углом к горизонту, корпус траверсы 1 изменяет свое положение при помощи гидроцилиндров- оттяжек 8. 6 ил. о Т (Л С
дг
S
n
«
S3
QO
SS
t
«o
I
| Манипулятор | 1984 |
|
SU1333567A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
