(54) УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПОДВЕСОК С ТРАВЕРС ПОДВЕСНОГО КОНВЕЙЕРА Изобретение относится к промышленному транспорту и может быть использовано во всех отраслях народного хозяйства для автоматизации погрузочно-разгрузочных операций при транспортировании грузов по разветвленным конвейерным трассам, например, в гальванических цехах для передачи технологических подвесок на гальванические автоматические и механизированные линии, а также съема с линии подвесок и передачи их на конвейер. Известно устройство перегрузки подвесок с траверс подвесного конвейера, включаюш.ее поперечные направляющие с размещенной в них приводной тележкой, в про/ дольных направляющих которой размещен манипулятор с приводной горизонтальной кареткой, имеющей захватные крюки, связанные с приводом их вертикального перемещения, и синхронизирующее приспособление 1. Недостатком данного устройства является применение дополнительных приводов для возврата тележки, применение самостоятельного привода для синхронизирующего приспособления, применение силового цилиндра для перемещения горизонтальной каретки, отсутствие фиксации траверсы в процессе съема с нее подвески и ненадежная установка подвесок на траверсе и манипуляторе. Наиболее близким к изобретению по технической сущности и достигаемому эффекту является устройство для перегрузки подвесок с траверс подвесного конвейера, включающее поперечные направляющие с размещенной в них приводной тележкой, в продольных направляющих которой размещен манипулятор с приводной вертикальной кареткой и приводной горизонтальной кареткой с захватными крюками, и синхронизирующее приспособление 2. Недостатком данного устройства является отсутствие фиксации траверс в процессе съема с них подвесок, возможность раскачивания подвесок на траверсах и захватах манипулятора, а также применение силового цилиндра для перемещения горизонтальной каретки. Данные недостатки снижают надежность работы устройства в целом. Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается тем, что устройство для перегрузки подвесок с травере подвесного конвейера, включающее поперечные направляющие с размещенной в них приводной тележкой; в продольных направляющих которой размещен манипулятор с приводной вертикальной кареткой и приводной горизонтальной кареткой с захватными крюками, и синхронизирующее приспособление, снабжено фиксирующим приспособлением траверсы подвесного конвейера, .выполненным в виде шарнирно установленных на манипуляторе крюков, имеющих механизм управления в виде копира, закрепленного на тележке, и ползуна, связанного одним концом с крюками, а другим - посредством ролика с копиром, при этом подвеска выполнена с двумя парами консолей, имеющих клиновую форму, а привод перемещения горизонтальной каретки выполнен в виде соединенного с вертикальной кареткой гибкого незамкнутого элемента, концы которого связаны с горизонтальной кареткой.
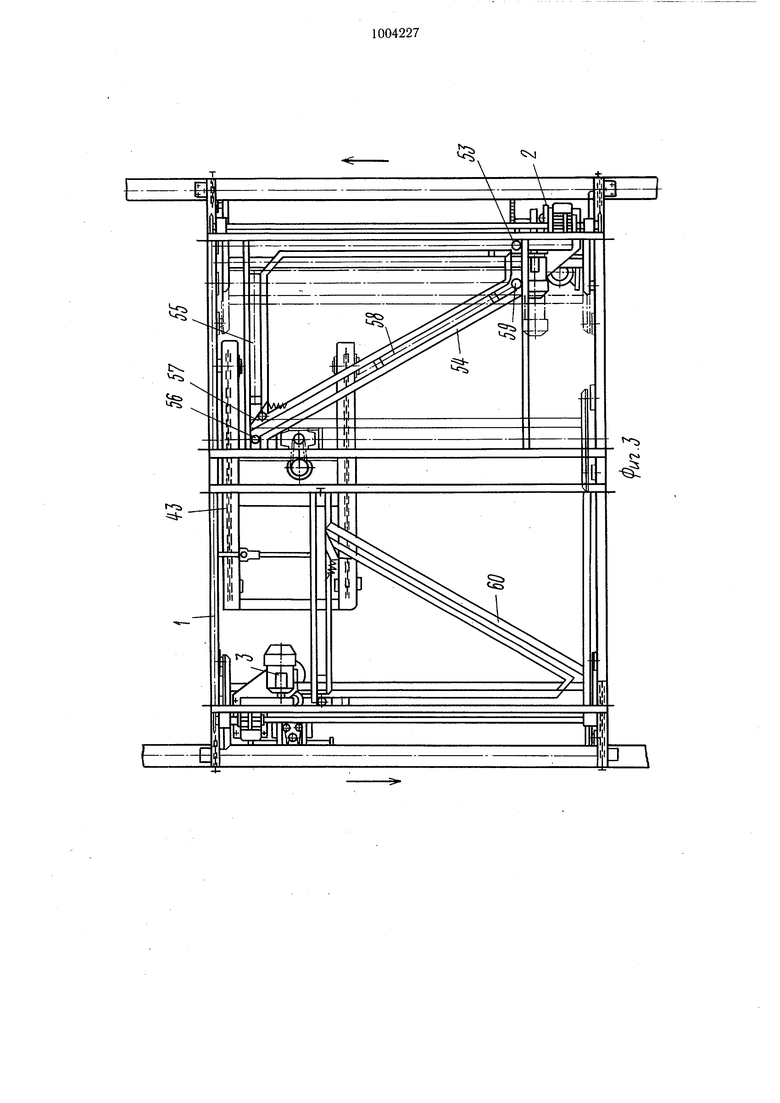
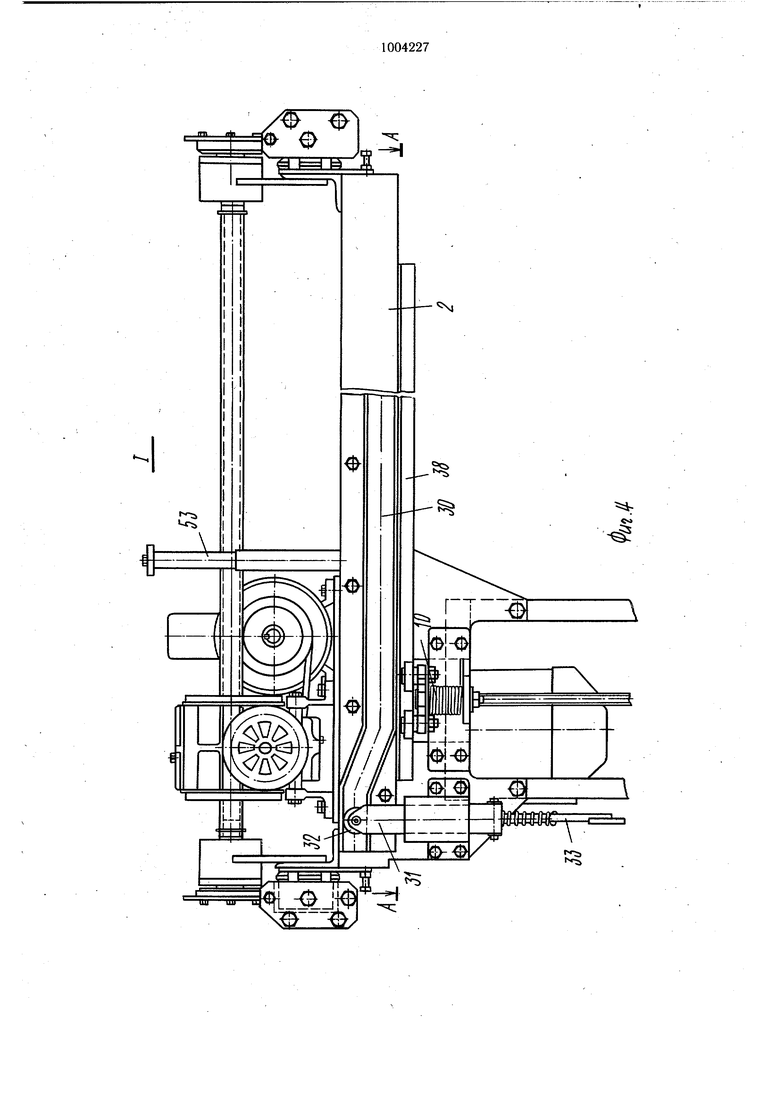
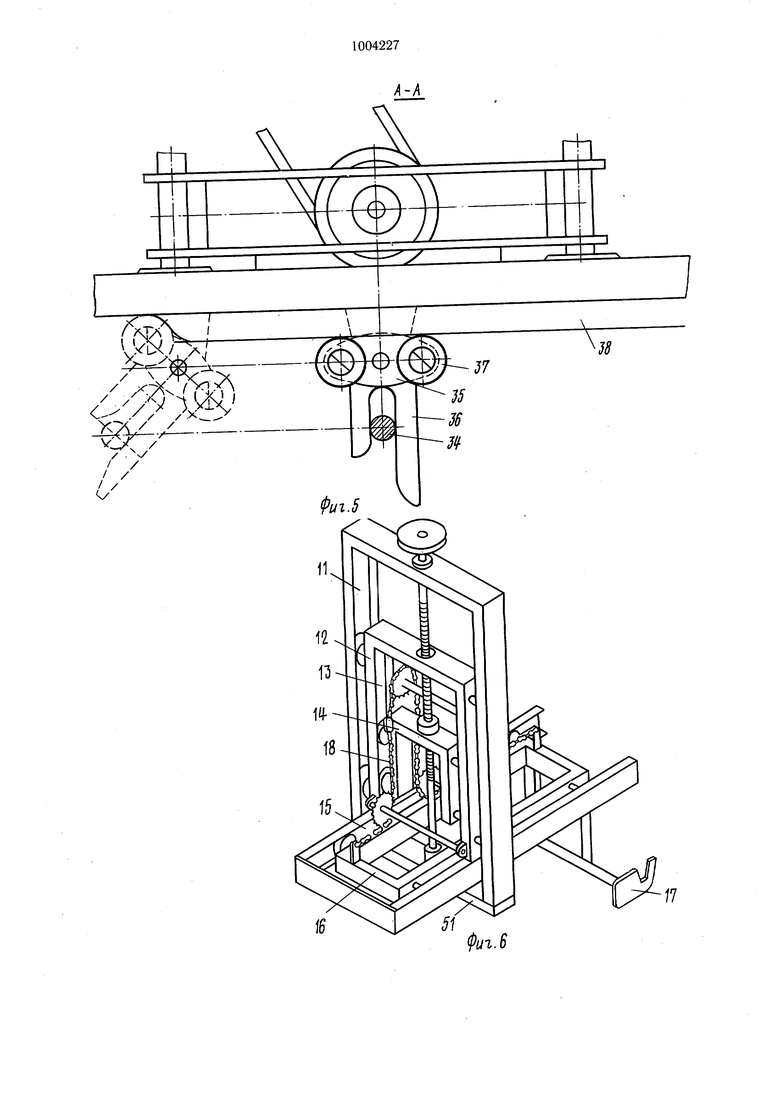
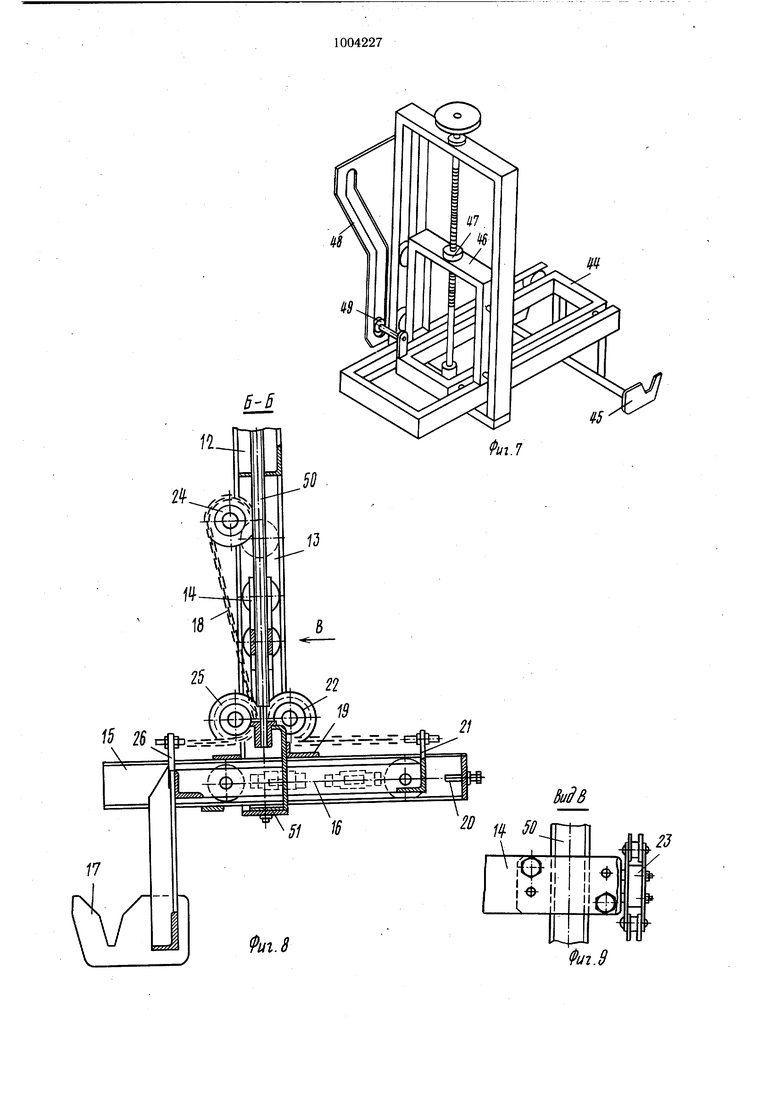
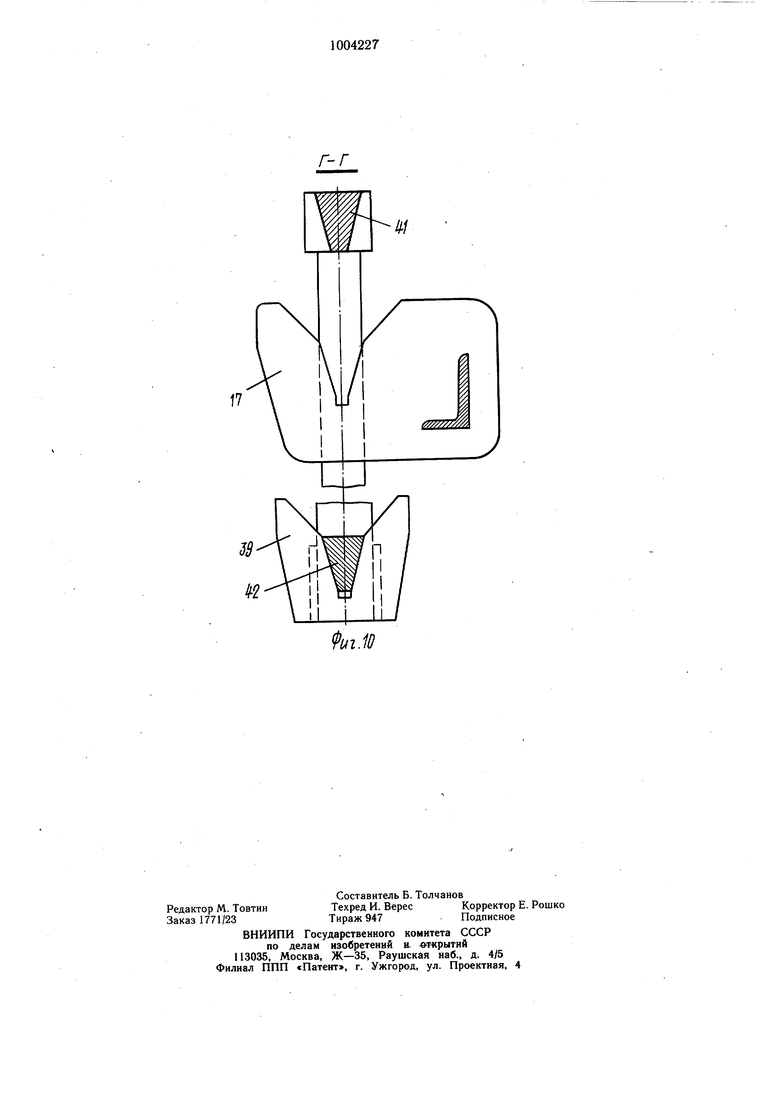
На фиг. 1 изображено устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - узел I на фиг. 1; на фиг. 5 - разрез А-А на фиг. 4; на фиг. 6 - кинематическая схема разгрузочного манипулятора; на фиг. 7 - кинематическая схема погрузочного манипулятора; на фиг. 8 - разрез Б-Б на фиг., 1; на фиг. 9 - вид В на фиг. 8; на фиг. 10 - разрез Г-Г на фиг. 1.
Устройство содержит поперечные направляющие 1, опирающиеся на ездовой путь конвейера, в которых установлены приводные тележки 2 и 3, в направляющих которых установлены разгрузочный 4 и погрузочный 5 манипуляторы. Манипулятор разгрузочный 4 состоит из рамы 6 с опорными катками 7, на которой закреплены привод манипулятора 8, фиксирующее 9 и синхронизирующее 10 приспособления. В нанаправляющих 11 рамы 6 расположена вертикальная каретка 12, в направляющих 13 которой размещен приводной элемент, выполненный например, в виде каретки-гайки 14, а в направляющих 15 - горизонтальная каретка 16 с грузозахватными клиновыми крюками 17, связанными между собой гибкой связью, например, цепью 18. Упорпланка 19 и упор 20 вертикальной каретки 12 ограничивают крайние положения горизонтальной каретки 16. При движении горизонтальной каретки 16 вперед упором ей служит планка 19, связывающая направляющие 13 и 15 вертикальной каретки 12. Движение гооризонтальной каретки 16 вперед прекращается при касании ее кронштейна 21 и планки 19. Движение горизонтальной каретки 16 назад ограничивается упором 20. Взаимодействие вертикальной каретки 12, каретки-гайки 14 и горизонтальной каретки 16 между собой осуществляется с помощью цепи 18. Цепь 18 одним концом закреплена на кронштейне 21, в задней части горизонтальной каретки 16, огибает звездочку 22, закрепленную осью на направляющих 13 вертикальной каретки 12, средней частью закреплена на кронштейне 23 каретки-гайки 14, огибает звездочки 24 и 25,
закрепленные осями на направляющих 13 вертикальной каретки 12, и вторым концом закреплена на кронштейне 26 в передней части горизонтальной каретки 16.
Фиксирующее приспособление 9 выполнеено в виде двух крюков 27, взаимодей® ствующих с горизонтальной перекладиной 28 траверсы 29 и имеющих механизм управления в виде копира 30, закрепленного на тележке 2 с помощью ползуна 31 с роликом 32 и подпружиненного рычага 33.
Синхронизирующее приспособление 10 выполнено в виде подпружиненного ловителя, сцепляющегося с ведущим штырем 34 конвейера. Ловитель имеет вилочный захват 35 с удлиненным ведущим упором 36 и ролики 37, взаимодействующие с управляющим копиром 38, закрепленным на тележке 2. Траверса 29 выполнена в виде скобы с консольными клиновыми захватами 39. Подвеска 40 снабжена двумя парами клиновых консолей: верхними 41, взаимодей5 ствующими с грузозахватными клиновыми крюками 17 манипуляторов, и нижними 42, опирающимися на клиновые захваты 39 транспортной подвески, на секцию-накопитель 43 или на перегрузочную стойку (не показана).
0 Манипулятор погрузочный 5 выполнен аналогично манипулятору разгрузочному. Отличие заключается в управлении движением горизонтальной каретки 44 с грузозахватными клиновыми крюками 45. Вертикальная каретка 46 с гайкой 47 снабжена
копиром 48, а в ее направляющих расположена горизонтальная каретка 44, имеющая ролик 49, взаимодействующий с копиром 48. Устройство работает следующим образом.
При подходе траверсы с подвеской, заадресованной на данную автоматизированную гальваническую линию-, считывающее приспособление (не показано) дает сигнал на операцию разгрузки конвейера. Приводная тележка 2 с разгрузочным манипулято5 ром 4 при этом находится на позиции ожидания, удаленной от оси конвейера, на расстояние, достаточное для прохождения грузов на конвейере.
По команде считывающего устройства тележка 2 по направляющим 1 перемещается в рабочее положение (не показано). В момент совпадения осей траверсы 29 и манипулятора 4 происходит сцепление ведущего штыря 34, закрепленного, например, на траверсе с вилочным захватом 35 синхронизирующего приспособления 10.
Ведущий штырь 36 увлекает за собой
манипулятор 4 и перемещает его параллель, но трассе конвейера вдоль направляющих
приводной тележки 2. В процессе перемещения манипулятора 4 ползун 31 с роликом 32, .размещенным в копире 30, опускается и через подпружиненный рычаг 33 опускает крюки 27, на горизонтальную перекладину траверсы 29, фиксируя положение подвески относительно манипулятора. С заверщением фиксации подвески датчиком (не показан) включается привод 8 манипулятора. При включении привода 8 на подъем начинается перемещение каретки,гайки 14 вверх по винту 50. В ходе движения каретка-гайка 14 натягивает конец цепи 18, закрепленный на кронщтейне 21, и освобождает второй ее конец. Происходит перемещение горизонтальной каретки 16 вперед до упора 19.
С заверщением этого движения цепь останавливается и в ходе дальнейщего перемещения каретки-гайки 14 начинается движение вверх вертикальной каретки 12 вместе с горизонтальной кареткой 16. Движение вертикальной каретки 12 не может начаться раньще перемещения горизонтальной каретки 16 вперед до упора 19, так как сопротивление перекрыванию горизонтальной каретки 16 значительно ниже, чем масса вертикальной 12 и горизонтальной 16 кареток.
По той же причине, при включении привода 8 опускание вначале происходит опускание вертикальной каретки 12 до упора 51, а затем каретка-гайка 14, натягивая конец цепи 18, закрепленныйна кронщтейне 26 и освобождая другой ее конец, перемещает горизонтальную каретку 16 назад до упора 20, после чего привод 8 отключается. Осуществляется съем подвески 40. С заверщением съема подвески с траверсы 29 копиром 30 производится расфиксация транспортной подвески, а затем включается привод тележки 2. При этом, благодаря удлиненному ведущему упору вилочного захвата 35 продолжается синхронное совместное движение манипулятора и траверсы 29 вплоть до полного вывода подвески из траверсы.
С заверщением операций съема подвески 40 траверсы 29 и расфиксации траверсы 29 привод тележки 2 включается и тележка 2 с манипулятором 4 начинает отъезжать от конвейера. В ходе этого движения, благодаря удлиненному ведущему упору 36 вилочного захвата 35 манипулятора 4, продолжается еще синхронное совместное движение манипулятора 4 вдоль направляющих 52 тележки 2 и траверсы 29 вплоть до определенного перемещения от конвейера тележки 2 с манипулятором 4, достаточного для полного вывода подвески 40 из траверсы 29. При этом удлиненный ведущий упор 36 вилочного захвата 36 скользит по ведущему щтырю 34 в направлении, перпендикулярном направлению движения конвейера, вплоть до полного размыкания. Тележка 2 отъезжает вдоль направляющих 1 от
конвейера к секции-накопителю 43, включается привод 8 манипулятора и подвеска опускается на секцию-накопитель. Во время движения тележки 2 с манипулятором 4 вдоль направляющих 1 к секции-накопителю 43 в крайнее, удаленное от конвейера положение, поводок 53, закрепленный на раме 6 и взаимодействующий с направляющей 54, перемещается по участку 55 направляющей 54, перпендикулярному направлению движения конвейера, до положения
56, удерживая манипулятор 4 в соответствующем положении. В конце этого хода тележки 2 поводок 53 проходит подпружиненную стрелку 57, обеспечивающую изменение направления движения поводка 53 при обратном ходе тележки 2 к конвейеру.
После опускания подвески на секцию-накопитель начинается движение тележки 2 к конвейеру в исходное положение. При этом поводок 53 перемещается по диагональному участку 58 направляющей 54 до
положения 59, увлекая за собой манипулятор 4, который по направляющим 52 возвращается в исходное положение (фиг. 3). С секции-накопителя подвески снимаются автроператором гальваноавтомата и проходят цикл покрытия. После заверщения процесса покрытия автооператор гальваноавтомата устанавливает подвеску на другую секцию-накопитель, установленную на другом конце гальванической линии.
Получив сигнал о наличии подвески на
конечной позиции секции-накопителя, погрузочный манипулятор 5 снимает ее и выходит в исходное положение для погрузки на встречную ветвь конвейера. По сигналу датчика свободной подвески аналогично описанному выще процессу разгрузки конвейера происходит выход приводной тележки 3 с погрузочным манипулятором 5, имеющим на своих грузозахватных клиновых крюках подвеску, на позицию погрузки. После сцепления синхронизирующего приспособления с ведущим щтырем 34 конвейера происходит фиксация траверсы и включается привод манипулятора. При опускании вертикальной каретки 46 с гайкой 47 по винту каретка 44 с грузозахватными клиновыми крюками 45 с помощью копира 48 вначале выдвигается на ось конвейера, а затем вертикально опускается, устанавливая подвеску своими нижними клиновыми консолями 42 в консольные клиновые захваты 39 подвески.
С заверщением погрузки подвески производится расфиксация транспортной подвески и включается привод тележки 3. Тележка 3 отъезжает от конвейера к секциинакопителю. В ходе этого движение с помощью направляющей 60 погрузочный манипулятор возвращается в исходное положение.
Данное устройство позволяет производить погрузочно-разгрузочные операции на конвейерных системах с накоплением технологических подвесок. Разгрузочный и погрузочный манипуляторы могут работать, как самостоятельно со своими накопителями, так и в комплексе, например, на участке монтажа и демонтажа деталей гальванического . В этом случае передача подвесок с разгрузочного манипулятора на погрузочный осуществляется через перегрузочную стойку или накопитель. Использование данного устройства позволит осуществить автоматическую погрузку и разгрузку конвеиерных систем на ходу с возможностью накопления технологических подвесок. Формула изобретения Устройство для перегрузки подвесок с траверс подвесного конвейера, включающее поперечные направляющие с размещенной в них приводной тележкой, в продольных направляющих которой размещен манипулятор с приводной вертикальной кареткой и приводной горизонтальной кареткой с захватными крюками, и синхронизирующее дриспособление, отличающееся тем, что, с целью повыщения надежности работы устт ройства, оно снабжено фиксирующим приспособлением траверсы подвесного конвейера, выполненным в виде щарнирно установленных на манипуляторе крюков, имеющих механизм управления в виде копира, закрепленного на тележке, и ползуна, связанного одним концом с крюками, а другим - посредством ролика с копиром, при этом подвеска выполнена с двумя парами консолей, имеющих клиновую форму, а привод перемещения горизонтальной каретки выполнен в виде соединенного с вертикальной кареткой гибкого незамкнутого элемента, концы которого связаны с горизонтальной кареткой. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 612868, кл. В 65 G 47/36, 1975. 2.Авторское свидетельство СССР № 682431; кл. В 65 G 47/52, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Поточная линия для окраски и сушки крупногабаритных и длинномерных изделий | 1977 |
|
SU745818A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для загрузки и разгрузки подвесок конвейера | 1979 |
|
SU861234A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| СТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ПОДВЕСНОГО КОНВЕЙЕРА | 1985 |
|
SU1277544A1 |
| Устройство для навешивания изделий на подвесной конвейер | 1982 |
|
SU1006341A1 |
| Автоматизированная линия для получения отливок | 1982 |
|
SU1154802A1 |
11
fg
Фиг.10
