(54) ГРУЗОПОДЪЕМНЫЙ КРАН
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель угла отклонения грузового полиспаста стрелового крана | 1975 |
|
SU550333A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1972 |
|
SU434055A1 |
| Строительное грузоподъемное устройство | 1984 |
|
SU1312048A1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1993 |
|
RU2063375C1 |
| САМОХОДНЫЙ СВАЙНЫЙ КОПЕР | 1967 |
|
SU192076A1 |
| БЕЗОПАСНЫЙ КАНАТНЫЙ ПОЛИСПАСТ | 2004 |
|
RU2266860C1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| ПОДВИЖНЫЙ ПРОТИВОВЕС ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2268234C1 |
1
Изобретение относится к грузоподъемной технике, а именно к стреловым судовым кранам.
Известен грузоподъемный кран, устанавливаемый преимущественно на судах и понтонах, содержащий основание со смонтированными на нем кач-ающейся в вертикальной плоскости стрелой и рамой, на которой установлена с возможностью перемещения тележка,.причем стрела щарнирно соединена с тележкой посредством рычага I.ю
Недостатком известного крана является то, что он не обеспечивает точного горизонтального перемещения груза при крене или качке судна.
Цель изобретения - повыщение надежности работы за счет обеспечения горизонтального перемещения груза при крене крана.
Указанная цель достигается тем, что кран снабжен уравнительным полиспастом, подвижные блоки которого закреплены на те- 20 лежке, а неподвижные - на раме, щарнирно закрепленной на оси качания стрелы и удерживаемой в вертикальном положении с помощью стабилизирующего устройства.
Кроме того, стабилизирующее устройство содержит силовой цилиндр, корпус которого щарнирно закреплен к основанию, а щток - к реле, и датчик, закрепленный на раме, при этом силовой цилиндр и датчик соединены между собой через золотник.
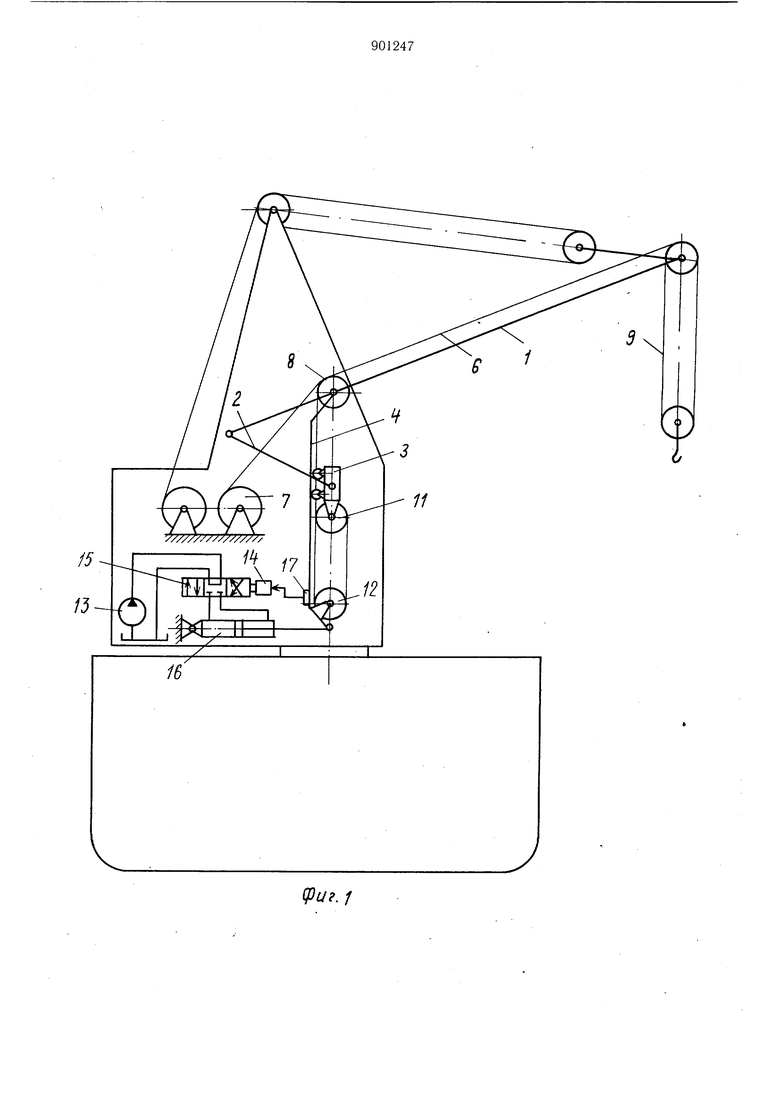
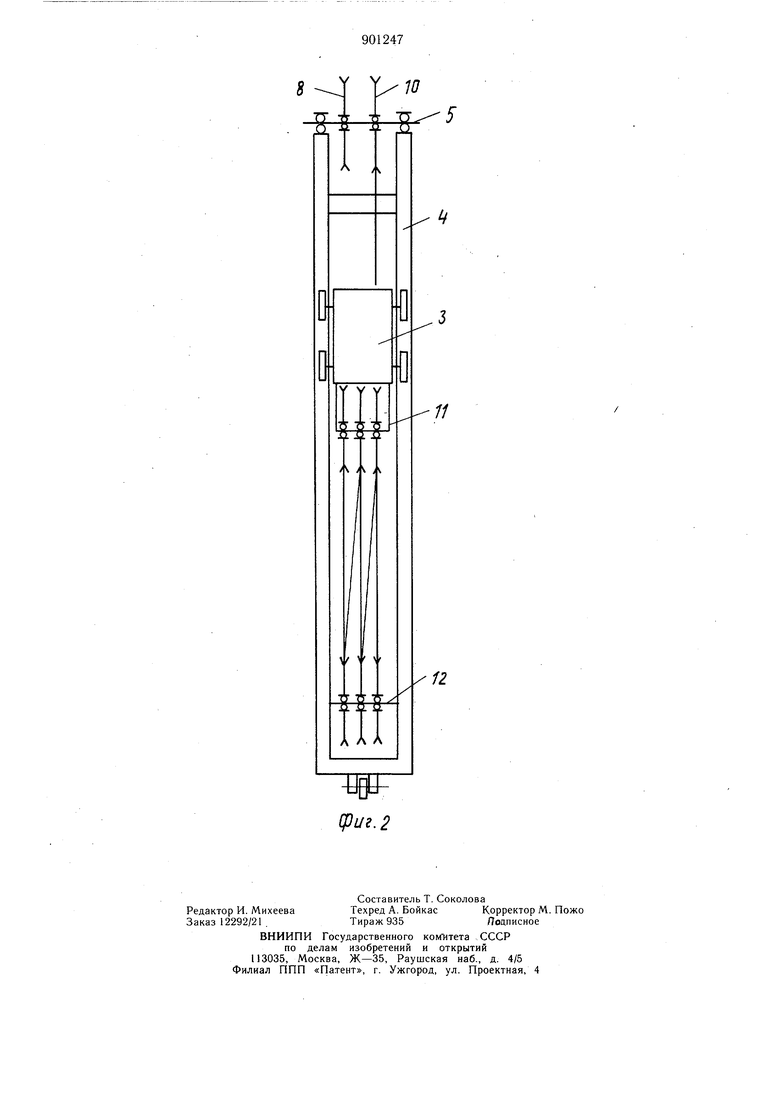
На фиг. 1 изображен предлагаемый кран, общий вид; на фиг. 2 - рама с тележкой и уравнительным полиспастом.
Грузоподъемный кран содержит стрелу 1 связанную рычагом 2 с тележкой 3, которая при качании стрелы перемещается по раме 4, щарнирно закрепленной на оси 5 качания стрелы 1. Подъемный канат 6 с барабана 7 через направляющий блок 8 идет вдоль стрелы на грузовой полиспаст 9. Обратная ветвь подъемного каната проходит через направляющий блок 10, огибает блоки подвижной обоймы 11, установленной на тележке 3, и блоки неподвижной обоймы 12, установленной на раме 4, образуя уравнительный полиспаст. Стабилизирующее устройство рамы 4 в вертикальном положении состоит из насоса 13, исполнительного механизма 14, золотника 15, силового ц.илиндра 16, щток которого соединен с рамой 4, на которой установлен управляющий датчик 17 крена.
Кран работает следующим образом.
При качании стрелы 1 тележка 3 перемещается по раме 4. Расстояние между подвижной обоймой 11 блоков и неподвижной обоймой 12 изменяется, и за счет перекатывания обратной ветви подъемного каната 6 изменяется длина подвеса груза и компенсируются вертикальные перемещения концевого блока при качании стрелы 1.
При возникновении крена в сторону вылета, рама 4 отклоняется влево от вертикали и датчик 17 подает управляющий сигнал в исполнительный механизм 14 золотника 15. Золотник сдвигается в левое положение, и жидкость от насоса 13 поступает в левую часть цилиндра 16. Шток цилиндра перемещает раму 4 вправо до вертикального положения, при котором датчик 17 с по.мощью исполнительного механизма 14 устанавливает золотник 15 в среднее положение. При отклонении рамы 4 вправо от вертикали вследствие изменения крена при уменьшении вылета золотник 15 переводится в правое положение, при котором жидкость поступает в правую часть цилиндра, и рама 4 возвращается в вертикальное положение.
Изменение расстояния между обоймами блоков уравнительного полиспаста при дополнительном перемещении тележки 3 во время возвращения рамы 4 .в вертикальное положение обеспечивает изменение длины под,веса груза и компенсирует вертикальные перемещения концевого блока под влиянием крена.
Использование изобретения позволяет обеспечить горизонтальность перемещения груза любой массы при изменении вылета
стрелы и крена плавучих и судовых кранов, снизить до минимума нагрузки в механизме изменения вылета и мощность привода. Кроме того, уменьщается вероятность повреждения груза и повышается безопасность грузовых операций.
Формула изобретения
силовой цилиндр и датчик соединены между собой через золотник.
Источники инфор.мации, принятые во внимание при экспертизе 1. Дукельский А. И. Портовые грузоподъемные мащины. М., 1970, с. 281, рис. 13-9.
(pu.f
V
О О
