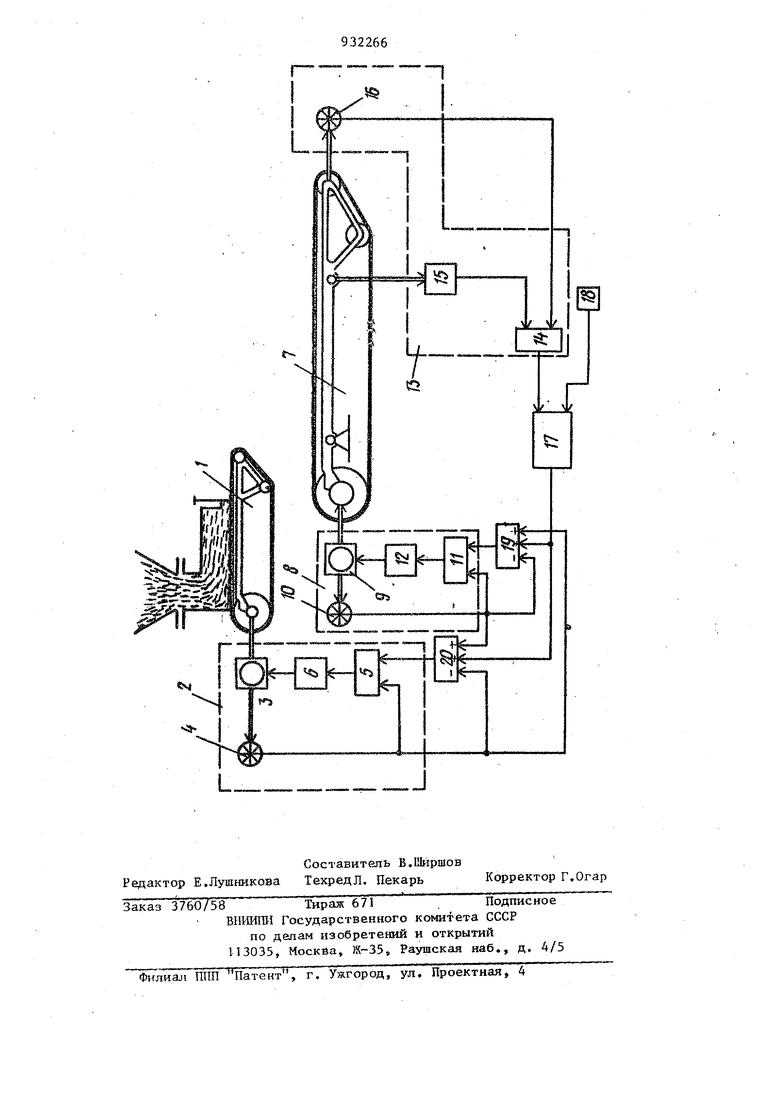
изобретение относится к весоизмерительной технике, в частности.к устройствам непрерывного весово го дозирования сыпучих материалов. Известен весовой дозатор непре- рывного действия, содержащий бункер с вибропобудителем и регулятором выхода материала, весоизмерительное устройство с преобразователем, задатчик и регулятор с исполнительным меха1шзмом питателя Г11. Однако в дозаторе вибропобудител и регулятор выхода материала соединен с выходами регулятора питателя и задатчика через дополнительные фу циональш 1е преобразователи с блоком выбора канала управления. Это повышает точность .дозирования, но из-за изменения скорости весового конвейера, последняя все же не явля ется удовлетворительной. Наиболее близким по технической сущности к предлагаемому является весовой дозатор непрерывного дейстВИЯ содержащий питатель и грузоприем1ый механизм с приводом, выполненными , каждый в виде двигателя с преобразователем скррости, подключенным к первому входу корректирукщего прибора, выход которого подключен к исполнительному механизму, управляющему двигателем, и связанньш с грузоприемным механизмом блок вычисления производительности, выход которого подключен к одному входу регулятора, к другому входу которого подключен выход задатчика производительности 2. В известном дозаторе с параллельным управлением приводами питателя и грузоприёмного механизма отсутствие взаимной связи по скорости между питателем и грузоприемным механизмом приводит к ухудшению динамических характеристик общего контура управления дозатором, так как вариация скорости движения приводов грузоприёмного механизма или питателя 393 вызывают появление отклонений в общем контуре управления, что-приводит к необходимости снижения чувствитель ности общего контура управления и, еледоватапьно, к повыше шо неравномерности подачи материала. Последнее в свою очередь приводит к понижению подачи материала. Цель изобретения повйаяение точности дозирования. . Поставленная це.аь достигается тем, что в весовой дозатор непрерьшиого действия введе,{-8л два сут атора. причем первые сум№{ру адке входы сумматоров поцкпк &ш к выходу ре ryjiHTOp s „второй суммнрукжргй вход liepBoro сумматора и вычитазоиий вход. второго сумматора соединены с выхо дом преобразователя скорости привода питателя, а второй суммирующий вход Второго сумматора н вычитаюЕргй вход первого суьшатора .соединен с выходом преобразователя скорости привода грузаприемного механизма, к второму акоду корректирующего прибо™ ра которого подключен выход первого сумматора. а выход второго сумматора под1сшочен к этсф.оь-гу входу корректиру ющего прибора привода питателя, чертеже показана скема ,доза.Дозатор непрерывного д ствия содержит питатель 3 с приводом 2, в состав которого входит двнгатепЕЬ 3 преобразователь 4 скорости, корректирующий прибор 5 и исиолнитепыай механизм б, грузоприемш |й мехамизм 7 с приводом 8, в состав которого входят двигатель 9, преобразователь 10 скорости J корректиру(щий прибор 11 и исполнительный механизм 2, бл 13 вычисления производительности со держит множитель 4, ко входам кОто рого подсоединены преобразовйтели 15 силы и Гб скорости, установленны на грузоприемноз механизме 7, Блок вычисления производительности соеди нен с первым входом регулятора 17 о щего контура управлешгя дозатором, К второму входу которого подсоедине
задатчик 18. производительности Выход регулятора 17 соединен с первыми суммирующими входами первого сумматора 19 второго сумматора 20, Второй суммирукйций вход сумматора 9 соединен с выходом преобразователя 4 скорости двигателя 3 питателя 1, а вычитакнций вход сумматора 19 соединен
двигателя 9.
На сумматоре 20 разность скоростей двигателей 3 и 9, наоборот приводит к появлению положительной разности ме)аду вторым суммирующим и вычитающим вх:одами,
В результате сигнал на управляющем входе привода 2 возрастает, что вызы-1 с выходом преобразователя 10 скорости двигателя 9. Второй суммирующий вход сумматора 20 соединен с выходом преобразователя 10 скорости двигателя 9, а вычитающий вход сумматора 20 соединен с выходом преобразователя 4 скорости двигателя 3, Дозатор работает следующим образом. , В исходном состоянии при отсутствии сигнала на выходе задатчика 18 сигнал на выкоде, регулятора 17 равен нулю. При установке задания на задатчи- ке 18 сигнал на выходе регулятора 17 начинает возрастать. Одновременно возрастают сигналы на управляюиЕик входах привода 8 грузоприемного механизма 7 и привода 2 питателя 1 . В приводах 2 и 8 увеличение сигналов на управлякдчих входах приводит к вЬз растанию скоростей дригателей 3 и 9 соответственно. С помснцыо обратной связи, осуществляемой с помощью преобразователя 4 в приводе 2 и преобразователя 10 в приводе 8, осуществляется точная отработка заданной ведячяны скорости по команде регулятора 17, поступающей аа управляющий вход привода 8 через первый сумматор 19 и управияюлдай вход привода 2 через второй сумматор 20. Синхронная отработка команд приводами и 8 осуществляется с помснцью связи дополнительных вкодов сумматоров 19 и 20 с. преобразователями 4 и Ю скорости двигателей 3 и 9. Если скорость двигателя 9 возрастает быстрее и становится выше скоросш двигателя 3 привода питателя 1 между вторым суммирующим и вычитаййдим входами сугшатора 19 появляется отрицательная разность сигналов, которая уменьшает величину управляющего сигнала, поступающего с выхода регулятора 7. Умешашение величины управлякнцего сигнала на управляняцем входе привода 8 к уменьшению скорости вает увеличение скорсюти двигателя 3. Таким образом, происходит взаимная синхронизация скоростей двигателей 3 и 9, ограначивающая расхождение их скоростей. В устанонивш 4ся режиме отклонения скорости двигателя 3 (например уменьшениепод да1ствием сопротивления вытяжке материала) вызывает аналогичную реакцию cHCTei ej синхронизации приводов 2 и 8. Таким образом, введенные в схему синхрошзации сумматоры 19 и 20 обес .печивают взаимную, достаточно жесткую связь по скорости, что позволяет исключить отклонения в общем контуре управле1шя, связанные с изменением количества материала на грузоприемном механизме. Это в свш очередь позволяет повысить чувствительность рбцего контура управления и° равнсмерйость подачи дозируемого материалаВнедрение предлагаемого дoзatopa особенно эффективно повыаает точкость дозирова1шя с ограничения по неравномерности потока дозщ)уемого материала при малшх интервалах Времени Контроля .(60-180 с). Формула изобретения Весовой дозатор непрерывного действия, содержавши пйтateль и грузоприемный механизм с приводами, выпол ненными каждый в виде двигателя с пр образователен скороста, подключенным к первому входу корректирующего прибора, выход которого подключен к исполнительному механизму, управляющему двигателем, и связанный с грузоприемным механизмом блок вычисления производительности, выход 1соторого подключен к одному входу резгулятора, к другому входу которого подключен выход задатчика производительности, отличающийся тем, что, с целью повышения точности дозирова1шя, в него введены два cyi«4aтора, причем первые суммирукяше входы обоих сумматоров подключены к выходу регулятора, второй сумьмруюощй вход первого сумматора и вычитакяций вход второго сумматора соединена с выходе преобразователя скорости привода питателя, а второй суммирующий вход второго сумматора и вычитакяций вход первого сумматора соед снены с выходом преобразователя скорости привода грузоприемного механизма, к второму входу корректирующего прибора которого подключен лервого сумматора, а выход второго сумматора подключен к второму входу корректирующего прибора привода питателя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР f 502227, кл. G 01 G П/02, 1974. 2.Авторское свидетельство СССР № 584619, 1Ш, G 01 G 11/00, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор непрерывного действия | 1979 |
|
SU826292A1 |
| Пневматический весовой дозатор непрерывного действия | 1979 |
|
SU792081A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Устройство для непрерывного весового дозирования сыпучих материалов | 1980 |
|
SU892225A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Весовой дозатор непрерывного действия | 1985 |
|
SU1310643A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| Дозатор непрерывного действия | 1979 |
|
SU798739A1 |