(5) ГИДРОДИНАМИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ЛАГ
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ ЭЛЕКТРОМАГНИТОМ | 2023 |
|
RU2815914C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Устройство для контроля качества сварного шва при роликовой сварке | 1959 |
|
SU130233A1 |
| Приемное устройство индукционноголАгА | 1977 |
|
SU800885A1 |
| Устройство для измерения скорости движения судна | 1986 |
|
SU1530996A1 |
| ДАТЧИК АБСОЛЮТНОГО ДАВЛЕНИЯ | 1973 |
|
SU361404A1 |
| Электромагнитный расходомер | 1991 |
|
SU1830135A3 |
| Акселерометр | 1983 |
|
SU1109647A1 |
| Электромагнитный пневмопривод искусственного сердца | 1985 |
|
SU1309986A1 |

1
Изобретение относится к навигационному приборостроению и может быть использовано для измерения ско рости течения жидкости и газа.
Известны гидродинамические компенсационные лаги с измерительным устройством в виде компенсационного дифференциального манометра, где для компенсации усилия, развиваемого динамическим давлением на штоке мембраны, используются электромагнитные .силы, возникающие при прохождении тока по обмоткам электромагнита D.
Основным недостатком данных ла- . гой является их низкая точность измерения давления, зависящая от конструкции силовых узлов и от стабильности электромагнита.
Наиболее близким по технической сущности к предлагаемому является шведский лаг САЛ-12, содержащий корпус, сильфон, электромагнитное устройство е якорем и статором, устройство для измерения тока, датчик положения и регистрирующий блок С2.
Недостатками известного лага являются низкая точность измерения и малая надежность.
Цель изобретения - повышение точности и надежности работы.
Указанная цель достигается тем, что в лаге корпус заполнен жидкостью, якорь электромагнитного устройства
.10 помещен в жидкость и выполнен в виде донышка сильфона из ферромагнитного материала с полым объемом нейтральной плавучести, прикрепленного к корпусу с помощью мембраны.
ts
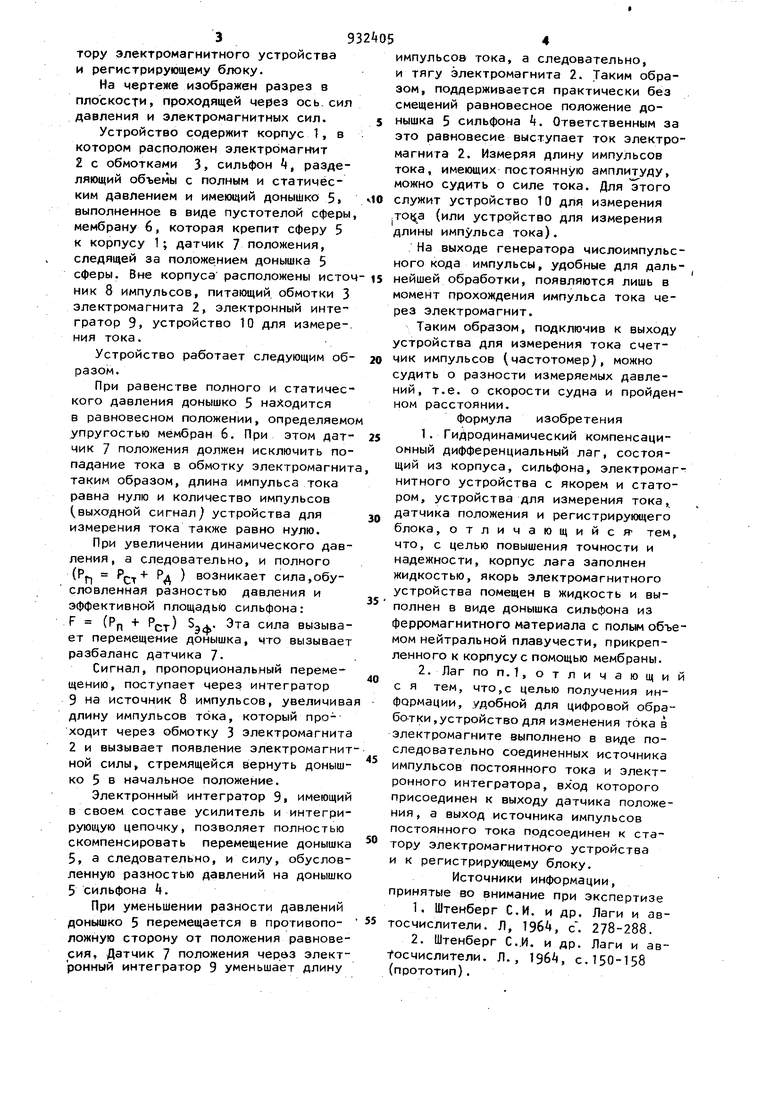
Устройство для изменения тока в электромагните выполнено в виде последовательно соединенных источника импульсов постоянного тока и элект20ронного интегратора, вход которого присоединен к выходу датчика положения , а выход источника импульсов постоянного тока подсоединен к статору электромагнитного устройства и регистрирующему блоку. На чертеже изображен разрез в плоскости, проходящей через ось, сил давления и электромагнитных сил. Устройство содержит корпус 1, в котором расположен электромагнит 2 с обмотками 3, сильфон i, разделяющий объемы с полным и статическим давлением и имеющий донышко 5 выполненное в виде пустотелой сферы, мембрану 6, которая крепит сферу 5 к корпусу 1; датчик 7 положения, следящей за положением донышка 5 сферы. Вне корпуса расположены источ ник 8 импульсов, питающий обмотки 3 электромагнита 2, электронный интегратор 9, устройство 10 для измере-. ния тока. Устройство работает следующим образом. При равенстве полного и статического давления донышко 5 находится в равновесном положении, определяемо упругостью мембран 6. При этом датчик 7 положения должен исключить попадание тока в обмотку электромагнит таким образом, длина импульса тока равна нулю и количество импульсов (выходной сигнал устройства для измерения тока также равно нулю. При увеличении динамического давления , а следовательно, и полного (Pj РГТ д ) возникает сила,обусловленная разностью давления и эффективной площадью сильфона: F (Pf, + Р(..) . Эта сила вызывает перемещение донышка, что вызывает разбаланс датчика 7. Сигнал, пропорциональный перемещению, поступает через интегратор 9 на источник 8 импульсов, увеличива длину импульсов тока, который проходит через обмотку 3 электромагнита 2 и вызывает появление электромагнит ной силы, стремящейся вернуть донышко 5 в начальное положение. Электронный интегратор 9, имеющий в своем составе усилитель и интегрирующую цепочку, позволяет полностью скомпенсировать перемещение донышка 5, а следовательно, и силу, обусловленную разностью давлений на донышко 5 сильфона k. При уменьшении разности давлений донышко 5 перемещается в противоположную сторону от положения равновесия. Датчик 7 положения через электронный интегратор 9 уменьшает длину 93 4 импульсов тока, а следовательно, и тягу электромагнита 2. Таким образом, поддерживается практически без смещений равновесное положение донышка 5 сильфона Ц, Ответственным за это равновесие выступает ток электромагнита 2. Измеряя длину импульсов тока, имеющих постоянную амплитуду, можно судить о силе тока. Для того служит устройство 10 для измерения (или устройство для измерения длины импульса тока). На выходе генератора числоимпульсного кода импульсы, удобные для дальнейшей обработки, появляются лишь в момент прохождения импульса тока через электромагнит. Таким образом, подключив к выходу устройства для измерения тока счетчик импульсов (частотомер), можно удить о разности измеряемых давлений, т.е. о скорости судна и пройденном расстоянии. Формула изобретения 1.Гидродинамический компенсационный дифференциальный лаг, состоящий из корпуса, сильфона, электромагнитного устройства с якорем и статором, устройства для измерения тока, датчика положения и регистрирукнцего блока, отличающийся тем, что, с целью повышения точности и надежности, корпус лага заполнен жидкостью, якорь электромагнитного устройства помещен в жидкость и выполнен в виде донышка сильфона из ферромагнитного материала с полым объемом нейтральной плавучести, прикрепленного к корпусу с помощью мембраны. 2.Лаг по п.1,отличающий с я тем, что,с целью получения информации, удобной для цифровой обработки, устройство для изменения тока в электромагните выполнено в виде последовательно соединенных источника импульсов постоянного тока и электронного интегратора, вход которого присоединен к выходу датчика положения, а выход источника импульсов постоянного тока подсоединен к статору электромагнитного устройства и к регистрирующему блоку. Источники информации, принятые во внимание при экспертизе 1,Штенберг С.И. и др. Лаги и автосчислители. Л, 1964, с. 278-288. 2.Штенберг С..И. и др. Лаги и авtocчиcлитeли, Л., 1964, с.150-158 (прототип).
