ел
ОС
ОС ОС
о: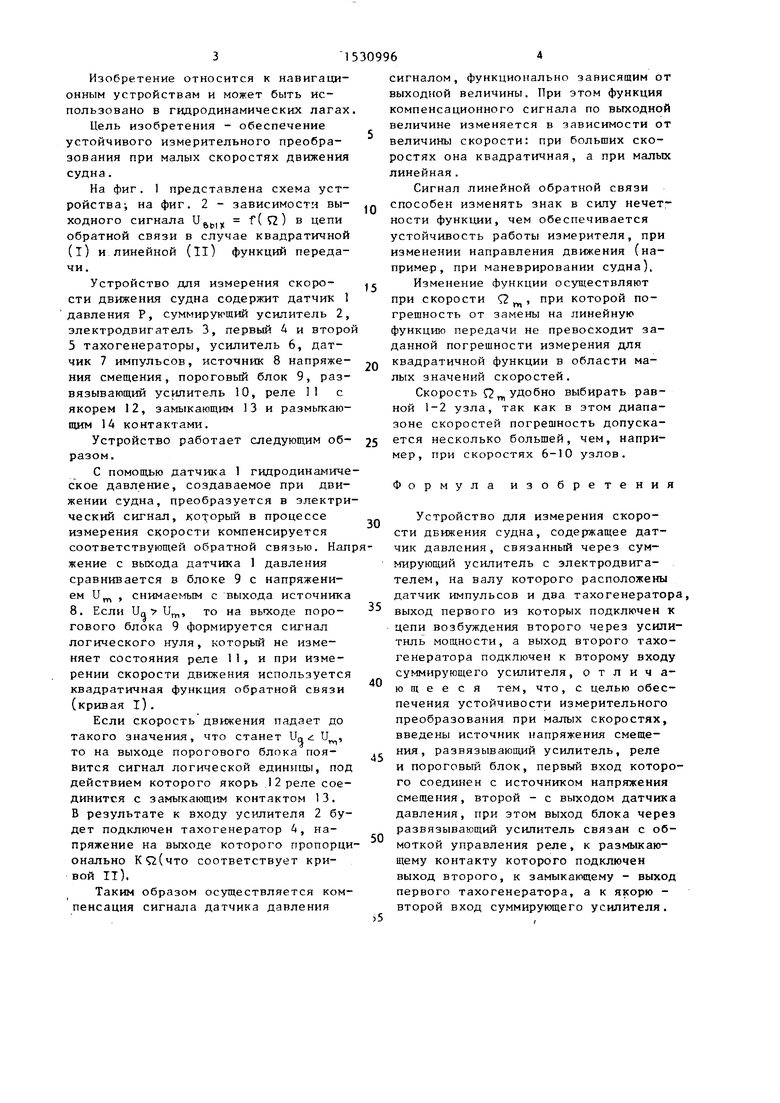
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Измерительное устройство гидродинамического лага | 1986 |
|
SU1401383A2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Устройство для управления процессом глубокого сверления | 1974 |
|
SU524612A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для измерения статической составляющей тока якоря двигателя постоянного тока | 1982 |
|
SU1030749A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
Изобретение относится к навигационным устройствам и может быть использовано в гидродинамических лагах. Целью изобретения является обеспечение устойчивости измерительного преобразования при малых скоростях движения судна. С помощью датчика 1 гидродинамическое давление, создаваемое при движении судна, преобразуется в электрический сигнал, который в процессе измерения скорости компенсируется соответствующей обратной связью. Напряжение с выхода датчика сравнивается в пороговом блоке 9 с опорным напряжением, снимаемым с выхода источника 8. При этом функция компенсационного сигнала цепями реле 11 переключается в зависимости от величины скорости: при больших скоростях она квадратичная, при малых - линейная. Поскольку сигнал линейной обратной связи способен изменять знак в силу нечетности функции, обеспечивается устойчивость работы измерителя при вариациях направления движения, характерных, например, для дрейфа судна. 2 ил.
epi/e.J
Изобретение относится к навигационным устройствам и может быть использовано в гидродинамических лагах
Цель изобретения - обеспечение устойчивого измерительного преобразования при малых скоростях движения судна.
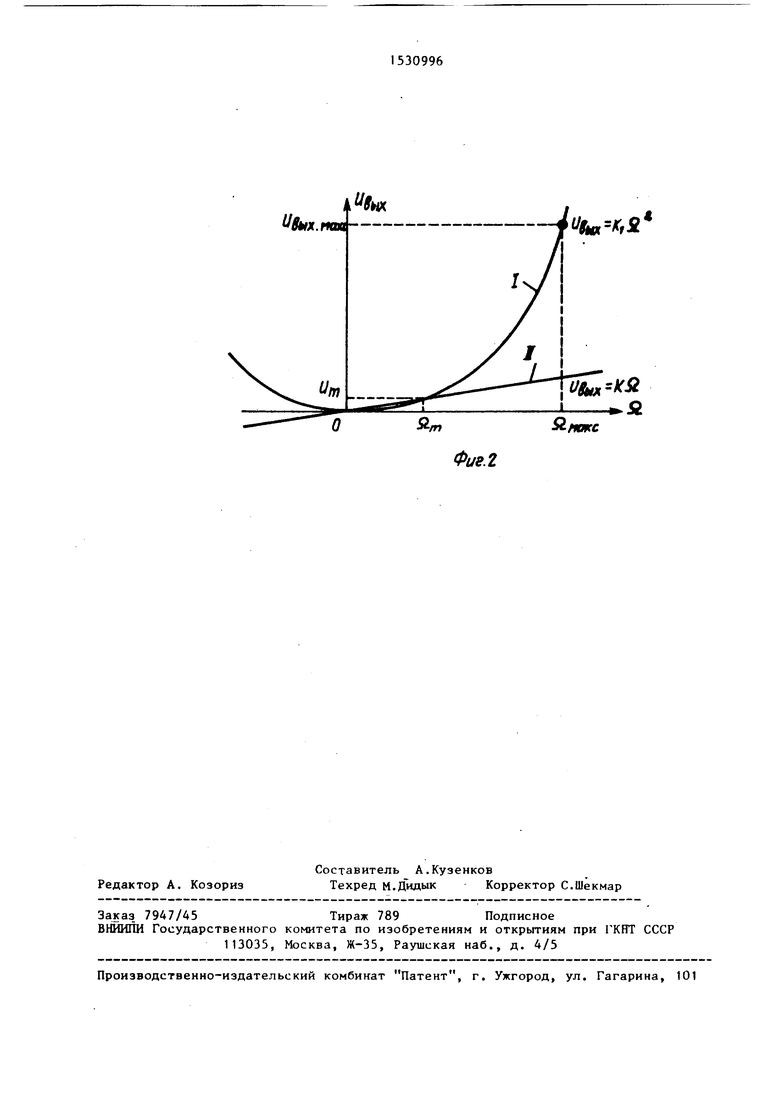
На фиг. 1 представлена схема устройства на фиг. 2 - зависимости вы- ходного сигнала f( П) в цепи обратной связи в случае квадратичной (l) и линейной (И) функций передачи.
Устройство для измерения скоро- сти движения судна содержит датчик 1 давления Р, суммирующий усилитель 2, электродвигатель 3, первый А и второ 5 тахогенераторы, усилитель 6, датчик 7 импульсов, источник 8 напряже- ния смещения, пороговый блок 9, развязывающий усилитель 10, реле П с якорем 12, замыкающим 13 и размыкающим 14 контактами.
Устройство работает следующим об- разом.
С помощью датчика 1 гидродинамическое давление, создаваемое при движении судна, преобразуется в электрический сигнал, в процессе измерения скорости компенсируется соответствующей обратной связью. Напжение с выхода датчика 1 давления сравнивается в блоке 9 с напряжением U , снимаемым с выхода источника 8. Если UQ Uf, то на выходе поро- гового блока 9 формируется сигнал логического нуля, который не изменяет состояния реле 11, и при измерении скорости движения используется квадратичная функция обратной связи (кривая I).
Если скорость движения падает до такого значения, что станет , то на выходе порогового блока появится сигнал логической единицы, под действием которого якорь 1 2 реле соединится с замьтающим контактом 13. В результате к входу усилителя 2 будет подключен тахогенератор 4, напряжение на выходе которого пропорционально К(что соответствует кривой IT).
Таким образом осуществляется компенсация сигнала датчика давления
с n
5
0
5
0
сигналом, функционально зависящим от выходной величины. При этом функция компенсационного сигнала по выходной величине изменяется в зависимости от величины скорости: при больших скоростях она квадратичная, а при малых линейная.
Сигнал линейной обратной связи способен изменять знак в силу нечетности функции, чем обеспечивается устойчивость работы измерителя, при изменении направления движения (например, при маневрировании судна),
Изменение функции осуществляют при скорости Q , при которой погрешность от замены на линейную функцию передачи не превосходит заданной погрешности измерения для квадратичной функции в области малых значений скоростей.
Скорость Q удобно выбирать равной 1-2 узла, так как в этом диапазоне скоростей погрешность допускается несколько большей, чем, например, при скоростях 6-10 узлов.
Формула изобретения
Устройство для измерения скорости движения судна, содержащее датчик давления, связанный через суммирующий усилитель с электродвигателем, на валу которого расположены датчик импульсов и два тахогенератора, выход первого из которых подключен к цепи возбуждения второго через усили- тнль мощности, а выход второго тахогенератора подключен к второму входу суммирующего усилителя, отличающееся тем, что, с целью обеспечения устойчивости измерительного преобразования при малых скоростях, введены источник напряжения смещения, развязывающий усилитель, реле и пороговый блок, первый вход которого соединен с источником напряжения смещения, второй - с выходом датчика давления, при этом выход блока через развязывающий усилитель связан с обмоткой управления реле, к размыкающему контакту которого подключен выход второго, к замыкающему - выход первого тахогенератора, а к якорю - второй вход суммирующего усилителя.
Urn
S-m
Sifmcc
Фиг. 2
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
